基于子空间的膝关节外骨骼人机姿态偏差辨识方法及装置与流程
1.本发明涉及外骨骼领域,特别涉及基于子空间的膝关节外骨骼人机姿态偏差辨识方法及装置。
背景技术:
2.可穿戴式外骨骼机器人是通过精密机械装置协助人体完成动作的,它结合了外骨骼仿生技术和信息控制技术,涉及生物运动学、机器人学、信息科学、人工智能等跨学科知识。目前对于可穿戴外骨骼状态下的人体姿态估计采用两种办法,一种是直接使用外骨骼上的角度编码器或者是惯性传感器(imu)进行计算,事实上通过这种方式计算的是外骨骼的姿态,忽略了人体姿态与外骨骼姿态的具有一定的偏差这个事实;另一种方法为通过绑缚在人体上的惯性传感器(imu)通过卡尔曼滤波等方法对人体姿态进行估计,此方法在不穿戴外骨骼时可以获得比较精确的测量值,但是在穿戴外骨骼的情况下,其安装位置和测量精度都会受到外骨骼助力过程的影响。
3.因此,如何提供一种精准的基于子空间的膝关节外骨骼人机姿态偏差辨识方法及装置是本领域技术人员亟待解决的问题。
技术实现要素:
4.本发明的目的是提供一种膝关节外骨骼人机姿态偏差辨识方法。
5.基于子空间的膝关节外骨骼人机姿态偏差辨识方法,包括:
6.获取膝关节外骨骼施加的力矩τ;
7.将所述力矩τ输入状态空间模型,获取可用于人体姿态修正的角度信息,其中,所述状态空间模型对膝关节外骨骼关节角度与人体实际膝关节角度进行偏差辨识。
8.进一步地,建立所述状态空间模型包括以下步骤:
9.建立所述力矩τ与人体姿态偏差δθ待辨识的参数方程;
10.输入伪随机二值序列得到实验数据;
11.利用子空间算法获取参数方程的表达式。
12.进一步地,所述建立所述力矩τ与人体姿态偏差δθ待辨识的参数方程,包括:
13.获取外骨骼动力学方程,外骨骼动力学方程包括小腿外骨骼动力学方程和大腿外骨骼动力学方程;
14.对所述外骨骼动力学方程进行拉普拉斯变换,获取外骨骼人机偏差之间的参数模型;
15.对所述外骨骼人机偏差之间的参数模型进行离散化,获得待辨识的参数模型。
16.进一步地,所述小腿骨骼动力学方程为:c
l
=c1l1+c2l2,k
l
=k1l1+k2l2;
17.所述大腿骨骼动力学方程为:c
u
=c1l1+c2l2,k
u
=
k1l1+k2l2;
18.其中,m
l
表示外骨骼小腿结构的转动惯量,θ
l
表示小腿的偏差角度,m
u
表示外骨骼大腿结构的转动惯量,θ
u
表示大腿的偏差角度,k1表示1号作用点的弹性系数,c1表示1号作用点的阻尼系数,l1表示1号作用点到膝关节的距离,k2表示2号作用点的弹性系数,c2表示2号作用点的阻尼系数,l2表示2号作用点到膝关节的距离。
19.进一步地,对小腿骨骼动力学方程进行拉普拉斯变换得到:进一步地,对小腿骨骼动力学方程进行拉普拉斯变换得到:
20.对大腿骨骼动力学方程进行拉普拉斯变换得到:
21.根据外骨骼人机偏差之间的参数模型与小腿骨骼动力学方程、大腿骨骼动力学方程之间的关系,即得到:
22.外骨骼人机偏差之间的参数模型为
23.其中,
24.b2=m
l
+m
u
,b1=c
l
+c
u
,b0=k
l
+k
u
;
25.a4=m
l
m
u
,a3=m
l
c
u
+m
u
c
l
,a2=m
l
k
u
+c
l
c
u
+m
u
k
l
,a1=c
l
k
u
+c
u
k
l
,a0=k
l
k
u
;
26.对所述外骨骼人机偏差之间的参数模型为进行离散化得到待辨识的参数模型的状态方程:
[0027][0028]
其中,其中,表示n维实数集;代表模型输入,与τ(k)对应;代表模型输出,与θ(k)对应;e(k)是一个白噪声序列,k是卡尔曼滤波器增益。
[0029]
进一步地,所述输入伪随机二值序列得到实验数据,包括:
[0030]
向膝关节外骨骼关节电机输入所述伪随机二值序列,获得响应数据,其中,所述伪随机二值序列的输入范围为[
‑
8nm,8nm];
[0031]
对所述响应数据进行预处理,获得数据集。
[0032]
进一步地,在过程噪声和测量噪声的情况下,所述待辨识的参数模型的状态方程变换为含噪声后的状态空间方程,所述含噪声后的状态空间方程为:
[0033][0034]
其中,e(k)是一个白噪声序列,k是卡尔曼滤波器增益;
[0035]
将所述含噪声后的状态空间方程转化为汉克尔矩阵形式:
[0036][0037]
在所述汉克尔矩阵左右同乘并根据po
‑
moesp子空间辨识算法,进行rq分解,得到的列空间;
[0038]
对所述的列空间进行奇异值分解,得到矩阵a
t
和c
t
;
[0039]
令
[0040][0041]
其中,vec()表示矩阵的向量化,
[0042]
令
[0043][0044]
通过最小二乘法求解:
[0045][0046]
得到矩阵b
t
和d
t
和初始状态x
t
(0)。
[0047]
进一步地,所述人体姿态偏差δθ为:
[0048]
δθ=θ
exo
‑
θ
human
;
[0049]
其中,θ
exo
表示膝关节外骨骼关节角度,θ
human
表示人体实际膝关节角度。
[0050]
本发明还提供一种基于子空间的膝关节外骨骼人机姿态偏差辨识装置,所述装置包括:
[0051]
膝关节外骨骼,所述膝关节外骨骼通过绑带与人体下肢绑缚连接;
[0052]
计算设备,获取膝关节外骨骼施加的力矩τ,将所述力矩τ输入状态空间模型,获取可用于人体姿态修正的角度信息,其中,所述状态空间模型对膝关节外骨骼关节角度与人体实际膝关节角度进行偏差辨识。
[0053]
进一步地,所述膝关节外骨骼包括外骨骼腰带、外骨骼大腿、外骨骼小腿和关节电机;其中,
[0054]
所述外骨骼大腿和所述外骨骼小腿上部和下部均设置有绑带;
[0055]
所述关节电机,用于接收力矩控制指令,向人体膝关节施加力矩。
[0056]
本发明通过建立外骨骼关节力矩与膝关节姿态偏差的状态空间模型,利用子空间算法对模型进行辨识,获取修正后的人体姿态数据,从而实现在穿戴外骨骼状态下人体姿态的精确解算。
附图说明
[0057]
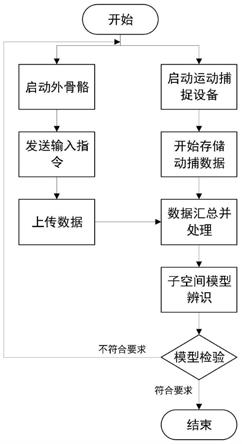
图1示出了本发明实施例中的建立状态空间模型流程图;
[0058]
图2示出了本发明实施例中的现有技术中关节力矩与角度偏差对比图;
[0059]
图3示出了本发明实施例中的人体实际膝关节角度示意图;
[0060]
图4示出了本发明实施例中的膝关节外骨骼的关节角度示意图。
具体实施方式
[0061]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例
所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0062]
现有技术中的可穿戴外骨骼状态下的人体姿态估计方法,当输入信号采用伪随机二值信号prbs(pseudo
‑
random binary sequence,伪随机二进制序列),信号输入范围为[
‑
8nm,8nm],得到的输出响应数据曲线如图2所示。从图2中可以发现,在输入
±
8nm(牛米)时,人机之间最大偏差可达正负20
°
,已经严重影响人体姿态估计的准确性,同时也说明本专利具有较强的实际应用价值。
[0063]
本发明提供一种基于子空间的膝关节外骨骼人机姿态偏差辨识方法,用于解决现有可穿戴外骨骼状态下的人体姿态估计方法计算的是外骨骼的姿态,忽略了人体姿态与外骨骼姿态之间偏差,当可穿戴外骨骼绑缚在人体膝关节进行助力时发生形变,造成人体实际姿态与计算得到的姿态误差较大,控制安全性降低的问题。
[0064]
图1示出了本发明实施例中的建立状态空间模型流程图。如图1所示,启动膝关节外骨骼,向膝关节外骨骼的关节电机输入力矩指令,关节电机上的绝对式编码器根据力矩指令计算得到外骨骼膝关节角度θ
exo
,并采用无线传输的方式将外骨骼膝关节角度θ
exo
上传至上位机,在向膝关节外骨骼的关节电机输入力矩指令的同时,启动运动捕捉装备,运动捕捉装备获得人体姿态信息,通过记录运动捕捉装备内运动捕捉传感器的数据,并无线实时传输至上位机处理软件中,通过分析处理,即可得到人体实际关节角度θ
human
,对采集到的数据进行汇总处理,得到数据集。根据外骨骼作用力及绑缚结构的特性建立待辨识的参数模型,然后根据获取得到的输入输出实验数据进行模型辨识,通过po
‑
moesp子空间辨识算法得到参数模型中的具体数值,从而得到系统的状态空间方程表达式,对模型进行检验验证,如果模型准确度不符合要求,则重复上述过程;反之,即可得到最终状态空间模型。
[0065]
在本发明实施例中,获得膝关节外骨骼施加的力矩τ作用下的状态空间模型是本发明实施例首先要解决的问题。
[0066]
(一)建立待辨识的参数模型
[0067]
如图3和图4所示,对膝关节外骨骼的关节电机施加力矩,由于人体肌肉的变形、绑缚结构的变形等引起外骨骼膝关节关节电机的运动,造成外骨骼关节角度与实际人体膝关节角度之间具有一定的偏差δθ。
[0068]
δθ=θ
exo
‑
θ
human
=θ
l
+θ
u
ꢀꢀꢀ
(1)
[0069]
其中,θ
exo
表示膝关节外骨骼的关节角度,θ
human
为人体实际膝关节角度,θ
l
表示小腿的偏差角度,θ
u
表示大腿的偏差角度。
[0070]
如图3所示,膝关节外骨骼在大腿和小腿上分别具有两个绑缚点,共四个,其编号如图所示。对外骨骼的小腿进行建模分析,可得:
[0071][0072]
其中,m
l
表示外骨骼小腿结构的转动惯量,θ
l
表示小腿的偏差角度,k1表示1号作用点的弹性系数,c1表示1号作用点的阻尼系数,l1表示1号作用点到膝关节的距离,k2表示2号作用点的弹性系数,c2表示2号作用点的阻尼系数,l2表示2号作用点到膝关节的距离。
[0073]
令c
l
=c1l1+c2l2,k
l
=k1l1+k2l2带入到式子中:
[0074][0075]
对其进行拉普拉斯变换,可得:
[0076][0077]
同理,对大腿部分进行建模可以得到:
[0078][0079]
其中,m
u
表示外骨骼大腿结构的转动惯量,θ
u
表示大腿的偏差角度,c
u
=c1l1+c2l2,k
u
=k1l1+k2l2。
[0080]
因此,可以得到外骨骼人机偏差之间的参数模型为:
[0081][0082]
其中,
[0083]
b2=m
l
+m
u
,b1=c
l
+c
u
,b1=k
l
+k
u
;
[0084]
a4=m
l
m
u
,a3=m
l
c
u
+m
u
c
l
,a2=m
l
k
u
+c
l
c
u
+m
u
k
l
,
[0085]
a1=c
l
k
u
+c
u
k
l
,a0=k
l
k
u
。
[0086]
为了便于外骨骼人机偏差之间的参数模型在计算机上的运行,将式7中的连续传递函数模型离散化,得到如下的离散状态方程:
[0087][0088]
其中,以此式作为待辨识的参数模型。
[0089]
(二)实验数据获取及处理
[0090]
向膝关节外骨骼关节电机输入伪随机二值信号,其中,伪随机二值信号的输入范围为[
‑
8nm,8nm],通过运动捕捉设备记录人体膝关节真实角度,通过测试仪记录外骨骼膝关节电机的绝对式编码器角度,利用式(1)可以计算得到人机膝关节角度偏差δθ。
[0091]
其中,输入的伪随机二值信号的长度应根据外骨骼系统限定的测量时间尽可能的延长。示例性的,当伪随机二值信号的长度为8秒时,对应重复3
‑
5次测试。输入信号的幅度应符合外骨骼力矩的输入范围,获取得到的响应数据后,对响应数据进行预处理,去除响应数据中的异常值中的异常值,形成数据集,本发明通过使用伪随机二值序列,在输入幅值有限制的情况下,对待辨识系统充分激励,充分获取系统的响应特性,为后续的状态空间模型辨识提供数据支撑。
[0092]
(三)利用子空间算法获取状态空间方程参数
[0093]
对于存在过程噪声和测量噪声的情况下,式(8)的待辨的识参数模型的状态方程转化为含噪声后的状态空间方程,含噪声后的状态空间方程为:
[0094][0095]
其中,其中,表示n维实数集,代表模型输入,与τ(k)对应,代表模型输出,与θ(k)对应,e(k)是一个白噪声序列,k是卡尔曼滤波器增益。将输出序列y(k)整理为汉克尔矩阵,具有如下的形式:
[0096][0097]
其中i代表时间索引,s代表数据扩展个数,n代表数据测量长度。同理,根据式10将输入序列u(k)整理为u
i,s,n
,误差序列e(k)整理为e
i,s,n
,将系统状态方程写为汉克尔矩阵形式为:
[0098][0099]
其中,
[0100][0101]
x
i,n
=[x(i)x(i+1)
…
x(i+n
‑
1)]
[0102][0103]
为描述汉克尔矩阵e
i,s,n
权重的矩阵。
[0104]
为了估计的列空间,首先将输入的影响消除,定义u
i,s,n
的正交投影矩阵为:
[0105][0106]
利用正交投影的性质,在式(11)左右同时乘以可得:
[0107][0108]
根据po
‑
moesp(误差状态空间算法)设定测量变量:
[0109][0110]
当s≥n时,rq分解如下:
[0111][0112]
可以推导得到
[0113][0114]
其中range()表示矩阵的列空间。
[0115]
对r
32
进行奇异值分解,根据矩阵的结构形式,即可得到矩阵a
t
和c
t
。
[0116]
令
[0117][0118]
其中,vec()表示矩阵的向量化。令
[0119][0120]
通过最小二乘法求解:
[0121]
即可得到矩阵b
t
和d
t
和初始状态x
t
(0)。矩阵a
t
,b
t
,c
t
,d
t
和x
t
(0)为式9中对应矩阵的估计结果,通过上述过程,完成系统参数辨识。
[0122]
首先通过外骨骼作用力及绑缚结构的特性建立待辨识的参数模型,然后根据获取得到的输入输出实验数据进行模型辨识,通过po
‑
moesp子空间辨识算法得到参数模型中的具体数值,从而得到系统的状态空间方程表达式。
[0123]
本发明实施例提供一种膝关节外骨骼人机姿态偏差辨识方法,包括:获取膝关节外骨骼施加的力矩τ;将所述力矩τ输入辨识得到的状态空间模型,从而得到膝关节角度偏差,可用于人体姿态修正。
[0124]
本发明通过建立外骨骼关节电机力矩τ与人体姿态偏差δθ待辨识的参数方程,通过输入伪随机二值序列得到实验数据,利用子空间算法得到参数方程的具体表达式,从而可以根据外骨骼关节电机力矩得到当前人体姿态偏差,修正后的人体姿态数据,从而实现在穿戴状态下的外骨骼向人体助力时更加精准的目的。
[0125]
本发明还提供一种膝关节外骨骼人机姿态偏差辨识装置,所述装置包括:膝关节外骨骼,所述膝关节外骨骼通过绑带与人体膝关节绑缚连接,膝关节外骨骼施加的力矩τ;计算设备,将力矩τ输入状态空间模型,所述状态空间模型对人体姿态偏差δθ进行偏差辨识,获取修正后的人体姿态数据。
[0126]
在本发明实施例中,所述装置还包括:运动捕捉装备,用于获得人体姿态信息;上位机,用于获取绝对式编码器测量的膝关节外骨骼关节角度θ
exo
;以及向外骨骼电机发送膝关节外骨骼施加力矩;接收所述人体实际膝关节角度信息,对所述人体实际膝关节角度信
息进行分析处理,得到人体实际膝关节角度信息θ
human
,利用膝关节外骨骼关节角度θ
exo
和人体实际膝关节角度信息θ
human
计算人体姿态偏差δθ。
[0127]
在本发明实施例中,所述膝关节外骨骼包括大腿外骨骼、小腿外骨骼和关节电机;其中,所述大腿外骨骼和所述小腿外骨骼上部和下部均设置有绑带;所述关节电机,用于接收力矩指令,向人体膝关节施加力矩。其中,关节电机上安装有绝对式编码器。示例性的,绝对编码器可以为14bit绝对编码器。
[0128]
以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1