一种基于自动跟踪的机载光电系统目标地理定位方法与流程
1.本发明属于机载光电系统目标定位技术领域,涉及一种基于自动跟踪的机载光电系统目标地理定位方法。
背景技术:
2.随着电子技术和计算机技术的快速发展,战场环境发生了深远的变化,传统的战术方法已经难以适应海、陆、空、天、电磁五位一体的立体战争,在隐身和反隐身博弈越发激烈的情况下,如何能隐蔽而准确地确定敌方位置显得尤为重要。通过雷达、激光等有源设备发射大功率探测信号对目标进行定位原理简单、定位精度高,但是极其容易暴露自己的位置,从而被敌方发现甚至打击。相比之下,被动定位能够在自身不发射电磁波的情况下,被动地接收目标辐射源的电磁波,以此确定目标的位置和运动状态,对于提高武器系统在战场环境下的生存能力和作战能力具有重要作用。
3.传统目标被动定位算法,载机根据光电平台和目标之间的相对高度和瞄准线倾角进行被动测距以代替主动定位中的激光测距,然后再利用基于测距的目标定位算法进行目标定位,这种定位方法容易受载机与目标之间的相对高度误差的影响,尤其在瞄准线倾角较大时,被动测距受载机相对高度误差的影响被严重放大,导致定位精度差,无法满足对远距离目标精确打击对定位精度的要求。
技术实现要素:
4.(一)发明目的
5.本发明的目的是:提供一种基于自动跟踪的机载光电系统目标地理定位方法,基于机载光电系统用的被动定位技术,并且不依赖载机的相对高度误差,通过识别捕获并跟踪目标,结合机载gps提供的载机位置(经度、纬度、高度)和姿态(航向角、横滚角、纵摇角)以及光电平台自身的方位角和俯仰角,对目标的大地坐标进行解算,实现目标被动地理定位功能。
6.(二)技术方案
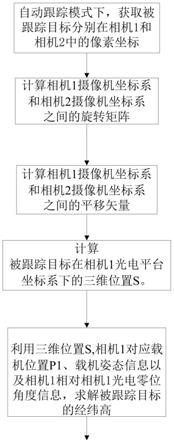
7.为了解决上述技术问题,本发明提供一种基于自动跟踪的机载光电系统目标地理定位方法,其包括以下步骤:
8.s1:在目标自动跟踪模式下,获取被跟踪目标像素坐标位置,被跟踪目标在相机1和相机2的像素坐标位置分别记为(x
l
,y
l
)、(x
r
,y
r
);
9.s2:采集相机1的大地坐标位置p1、相机1对应的载机姿态信息、相机1光电零位相对相机1载机机轴零位的偏角、相机1摄像机坐标系相对于相机1光电零位的角度信息、相机1东北天坐标系相对地心坐标系方位α1和俯仰角β1;
10.采集相机2的大地坐标位置p2、相机2对应的载机姿态信息、相机2光电零位相对相机2载机机轴零位的偏角、相机2摄像机坐标系相对于相机2光电零位的角度信息、相机2东北天坐标系相对地心坐标系的方位角α2和俯仰角β2;
11.s3:计算获得相机1摄像机坐标系和相机2摄像机坐标系之间的旋转矩阵r;
12.s4:计算获得相机1和相机2之间的平移矢量t;
13.s5:利用旋转矩阵r、平移矢量t以及被跟踪目标在相机1和相机2中的像素坐标位置(x
l
,y
l
),(x
r
,y
r
),获得被跟踪目标在相机1摄像机坐标系下的三维位置s(x,y,z);
14.s6利用上述求得的被跟踪目标在相机1摄像机坐标系下的三维位置s(x,y,z)、相机1的大地坐标位置p1、相机1对应的载机姿态信息、相机1光电零位相对于相机1载机机轴零位偏角、相机1摄像机坐标系相对相机1光电零位的角度信息、地心坐标系相对相机1东北天坐标系方位α1和俯仰角β1,求解被跟踪目标的经纬高。
15.(三)有益效果
16.机载光电被动定位是一种应用广泛的无源定位技术,通过识别捕获并跟踪目标,结合机载gps提供的载机位置(经度、纬度、高度)和姿态(航向角、横滚角、纵摇角)以及光电平台自身的方位角和俯仰角,对目标的大地坐标进行解算,实现目标被动定位功能。
17.传统目标被动定位算法,根据光电平台和目标之间的相对高度和瞄准线倾角进行被动测距以代替主动定位中的激光测距,被动测距容易受载机与目标之间的相对高度误差的影响,尤其在瞄准线倾角较大时,被动测距受载机相对高度误差的影响被严重放大,导致定位精度差,无法满足对远距离目标精确打击对定位精度的要求。与传统定位技术相比,本发明利用摄影测量前方交会的原理,利用自动跟踪可续连续获得被跟踪目标像素位置的功能,提出了一种基于自动跟踪的机载光电系统目标地理定位方法,具有如下有益效果:
18.(1)不需要对待定位目标进行主动或被动测距,不需要知道目标所处地面区域高程模型;
19.(2)不受载机相对高度误差的影响,充分利用自动跟踪功能提供的目标的连续运动像素位置;
20.(3)利用定位的结果可以建立有效的目标运动航迹,可以反馈给自动跟踪,提高自动跟踪抗干扰能力,同时为机载光电系统的态势感知提供有效的数据。
附图说明
21.图1是本发明的主流程图。
22.图2是本发明中求解相机1和相机2之间的旋转矩阵r流程图。
23.图3是本发明中求解相机1和相机2之间平移矢量t流程图。
具体实施方式
24.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
25.本专利提出了一种基于自动跟踪的机载光电系统目标地理定位方法,适用于运动载机对地面低速运动或静止目标的定位。利用t时刻和t+n时刻对应的被跟踪目标的像素坐标、相机包含的信息(载机位置、载机姿态信息、光电零位相对载机机轴的偏移角度、摄像机坐标系相对于光电零位的偏移角度)进行定位计算时,要保证n大于10,才能保证定位精度。以下为叙述方便,定义t+n帧对应的为相机2,定义t帧对应的为相机1。
26.首先,确保光电系统进入目标自动跟踪模式,获得连续帧中被跟踪目标的在相机1
和相机2中对应的像素坐标位置。
27.其次,采集相机1的大地坐标位置p1,相机1对应的载机姿态信息,相机1光电零位相对于相机1载机机轴的偏移角度,相机1摄像机坐标系相对于相机1光电零位的偏移角度,相机1东北天坐标系相对地心坐标系方位和俯仰角;
28.采集相机2的大地坐标位置p2,相机2对应的载机姿态信息,相机2光电零位相对于相机2载机机轴的偏移角度,相机2摄像机坐标系相对于相机2光电零位的偏移角度,相机2东北天坐标系相对地心坐标系方位和俯仰角;
29.再次,利用前面步骤采集到的信息,计算获得相机1摄像机坐标系和相机2摄像机坐标系之间的旋转矩阵。
30.再次,利用前面步骤采集到的信息,计算获得相机1摄像机坐标系和相机2摄像机坐标系之间的位移矢量。
31.再次,利用旋转矩阵和位移矢量获得被跟踪目标在相机1摄像机坐标系系下的三维位置s。
32.最后,利用求得的被跟踪目标在相机1摄像机坐标系下的三维位置s,相机1对应的载机位置p1、载机姿态信息,相机1光电零位相对于相机1载机机轴的偏移角度,相机1摄像机坐标系相对于相机1光电零位的偏移角度,求解被跟踪目标的经纬高,达到被动定位的目的。
33.参照图1所示,本发明方法的具体步骤如下:
34.s1:在目标自动跟踪模式下,获取被跟踪目标像素坐标位置,被跟踪目标在相机1和相机2的像素坐标位置分别为(x
l
,y
l
),(x
r
,y
r
)。
35.s2:采集相机1的大地坐标位置p1(包括经m1,纬n1,高l1),相机1对应的载机姿态信息(包括航向角α
f1
、俯仰角β
f1
以及横滚角γ
f1
),相机1光电零位相对相机1载机机轴零位的偏角(方位α
d1
,俯仰β
d1
,横滚γ
d1
),相机1摄像机坐标系相对于相机1光电零位的角度信息(包括俯仰θ
el1
和横滚θ
rq1
),相机1东北天坐标系相对地心坐标系方位α1和俯仰角β1;
36.采集相机2的大地坐标位置p2(包括经m2,纬n2,高l2),相机2对应的载机姿态信息(包括航向角α
f2
、俯仰角β
f2
以及横滚角γ
f2
),相机2光电零位相对相机2载机机轴零位的偏角(方位α
d2
,俯仰β
d2
,横滚γ
d2
),相机2摄像机坐标系相对于相机2光电零位的角度信息(包括俯仰θ
el2
和横滚θ
rq2
),相机2东北天坐标系相对地心坐标系的方位角α2和俯仰角β2。
37.s3:计算获得相机1摄像机坐标系和相机2摄像机坐标系之间的旋转矩阵:
[0038][0039]
具体参照图2所示,过程如下:
[0040]
s3.1相机2摄像机坐标系旋转到相机2东北天坐标系
[0041]
(1)相机2摄像机坐标系旋转到相机2光电零位,其中相机2摄像机坐标系相对于光电零位的角度信息俯仰θ
el2
,横滚θ
rq2
:
[0042][0043]
(2)相机2光电零位旋转到相机2载机机轴零位,其中α
d2
为相机2光电零位相对载机机轴零位的方位偏角,β
d2
为相机2光电零位相对载机机轴零位的俯仰偏角,γ
d2
为相机2光电零位相对载机机轴零位的横滚偏角:
[0044][0045]
(3)相机2载机机轴零位旋转到相机2东北天坐标系,其中α
f2
为相机2对应的载机航向角,β
f2
为载机俯仰角,γ
f2
为载机横滚角:
[0046][0047]
s3.2相机2东北天坐标系旋转到相机1东北天坐标系
[0048]
(1)相机2东北天坐标系旋转到地心坐标系,其中α2,β2分别代表相机2东北天坐标系相对地心坐标系的方位和俯仰角。
[0049][0050]
(2)地心坐标系到相机1的东北天的旋转矩阵,其中α1,β1分别代表相机1东北天相对地心坐标系方位和俯仰角。
[0051][0052]
s3.3相机1东北天坐标系旋转到相机1光电零位
[0053]
(1)相机1东北天坐标系旋转到载机机轴
[0054]
α
f1
为相机1对应的载机航向角,β
f1
为相机1对应的载机俯仰角,γ
f1
为相机1对应的载机横滚角,公式如下:
[0055]
[0056][0057]
(2)载机机轴旋转到相机1光电零位
[0058]
相机1光电零位相对相机1载机机轴零位的偏角(方位α
d1
,俯仰β
d1
,横滚γ
d1
),公式如下:
[0059][0060]
s3.4相机1光电零位旋转到相机1摄像机坐标系,公式如下,其中俯仰θ
el1
,横滚θ
rq1
:
[0061][0062]
最后,相机2坐标系到相机1坐标系旋转矩阵可表示为:
[0063]
r=r1*r2*r3*r4*r5*r6*r7*r8[0064]
s4:计算获得相机1和相机2之间的平移矢量
[0065]
即获得相机2摄像机坐标系到相机1摄像机坐标系的平移矢量t(t
x
,t
y
,t
z
)。
[0066]
具体参照图3所示,过程如下:
[0067]
s4.1获得地心坐标系中摄像机2的坐标(x
4_2
,y
4_2
,z
4_2
),相机2对应的载机的经度、纬度为m2,n2,r
e
近似为的地球半径。
[0068][0069]
s4.2地心坐标系中相机2位置(x
4_2
,y
4_2
,z
4_2
)转换到相机1的东北天坐标(x
5_1
,y
5_1
,z
5_1
)
[0070]
相机1对应的载机经度、纬度为m1,n1。r
e
近似地球半径。
[0071][0072]
a
t
=(x
4_2
,y
4_2
,z
4_2
)
[0073][0074]
(x
5_1
,y
5_1
,z
5_1
)==t(
·
a
t
‑
o
地心
)
[0075]
s4.3相机1东北天坐标系转换到相机1光电零位
[0076]
(1)相机1东北天坐标系旋转到载机机轴
[0077]
公式如下,其中α
f1
为相机1对应的载机航向角,β
f1
为相机1对应的载机俯仰角,γ
f1
为相机1对应的载机横滚角。
[0078][0079]
(2)载机机轴旋转到相机1光电零位
[0080]
相机1光电零位相对相机1载机机轴零位的偏角(方位α
d1
,俯仰β
d1
,横滚γ
d1
),公式如下:
[0081][0082][0083]
到这一步就可以获得相机2相对相机1的平移矢量t(t
x
,t
y
,t
z
)=(x
7_1
,y
7_1
,z
7_1
)。
[0084]
s5:利用旋转矩阵r、平移矢量t以及被跟踪目标在相机1和相机2中的像素坐标位置(x
l
,y
l
),(x
r
,y
r
),获得被跟踪目标在相机1摄像机坐标系下的三维位置s(x,y,z)。
[0085]
令旋转矩阵位移矩阵为t(t
x
,t
y
,t
z
),相机1和相机2的焦距f以及(x
l
,y
l
),(x
r
,y
r
),被跟踪目标在相机1光电坐标系下的三维位置s(x,y,z),其中,(x,y,z)表示如下:
[0086]
x=zx
l
/f
[0087]
y=zy
l
/f
[0088]
z=f(ft
x
‑
x
r
t
z
)/(x
r
(r7x
l
+r8y
l
+fr9)
‑
f(r1x
l
+r2y
l
+fr3)
[0089]
s6利用上述求得的被跟踪目标在相机1摄像机坐标系下的三维位置s(x,y,z),相
机1的大地坐标位置p1(包括经m1,纬n1,高l1),相机1对应的载机姿态信息(包括航向角α
f1
、俯仰角β
f1
以及横滚角γ
f1
),相机1光电零位相对于相机1载机机轴零位偏角(方位α
d1
,俯仰β
d1
,横滚γ
d1
),相机1摄像机坐标系相对相机1光电零位的角度信息(包括俯仰θ
el1
和横滚θ
rq1
),地心坐标系相对相机1东北天坐标系方位α1和俯仰角β1,求解被跟踪目标的经纬高。
[0090]
s6.1相机1摄像机坐标系转换到相机1的东北天坐标系
[0091]
(1)相机1摄像机坐标系旋转到相机1光电零位
[0092]
相机1摄像机坐标系坐标(x,y,z)旋转到相机1光电零位坐标(x2,y2,z2)的公式如下:其中相机1对应光电平台俯仰θ
el1
,横滚θ
rq1
:
[0093][0094]
(2)相机1光电零位旋转到相机1载机机轴零位,其中α
d1
为相机1光电零位相对载机机轴零位的方位偏角,β
d1
为相机1光电零位相对载机机轴零位的俯仰偏角,γ
d1
为相机1光电零位相对载机机轴零位的横滚偏角:
[0095][0096]
(3)相机1载机机轴零位旋转到相机1东北天坐标系,其中α
f1
为相机2对应的载机航向角,β
f1
为载机俯仰角,γ
f1
为载机横滚角:
[0097][0098]
s6.2相机1的东北天坐标转换到地心坐标
[0099]
即获得地心坐标系中被跟踪目标坐标(x,y,z),其中,相机1对应的载机经度、纬度为m1,n1。r
e
近似为o点的地球半径r
o
[0100][0101]
[0102][0103]
s6.3由地心坐标系转换为经纬高(b,l,h)
[0104]
目标在地心坐标系下可表示为(x,y,z),令n:椭球的卯酉圈曲率半径,e:椭球的第一偏心率,以a,b分别表示所取椭球的长半轴和短半轴,则有:
[0105][0106][0107]
r=[x2+y2+z2]
1/2
,
[0108]
w=(1
‑
e2sin2b)
1/2
,
[0109]
利用逐渐迭代的方式计算(b,l,h),即被跟踪目标的经纬高。其中b设初值为101度,逐步迭代为最终的目标位置。
[0110]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1