地铁线路直缓段处的加宽曲线计算方法
1.本发明涉及一种地铁线路直缓段处的加宽曲线计算方法,具体为一种求解地铁车辆过直缓段时内外侧加宽曲线的方法。
背景技术:
2.随着我国城市规模和经济建设的快速发展、城市化进程逐步加快,地铁车辆运营速度的提高成为了城市轨道交通的发展趋势;与此同时,城市轨道交通小半径曲线也越来越多这对车辆的限界安全有直接的影响;面对变化越来越复杂的城市轨道线路和运营速度的提高。目前在建设施工中常用到的设计方法已经无法满足城市轨道交通对限界设计的需求,现有的直缓段限界加宽计算方法基本采用三种较为常规方法:一是先计算出圆曲线范围内的加宽值,然后将这个加宽值沿缓和曲线有规则的分配,这种计算方法的缺陷是精度不高会使得限界设计造成过度的冗余存在着工程浪费现象;二是采用图解法使用cad软件绘制出缓和曲线、圆曲线的图像再模拟列车过曲线的过程;三是利用几何分析法针对线路直缓段的过渡区段,提出一种基于线路中心线的精确加宽量计算方法,上述计算方法中有些含有大量三角函数,增加了算法的复杂性;亦或者没有建立车体函数,不便于动态实时的监测列车的运动变化且在一些特殊点上不适用;依靠cad软件的方法实际运算也是非常复杂的,且对软件设备具有较高的要求。因此,本发明专利针对上述问题以建立数学函数为基础,使用微积分、最小二乘法拟合曲线以及导函数的应用通过建立车体函数,研究车体过直缓段行过程;针对列车过直缓段曲线归纳出内侧和外侧的加宽计算方法。
技术实现要素:
3.本发明的目的在于提供一种地铁直缓段加宽的计算方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种列车过圆缓段内外侧限界加宽的计算方法。
5.地铁线路圆缓段的加宽曲线计算方法,包括以下几个步骤:
6.s1,考虑车体几何偏移产生的内侧限界加宽,包括以下几个小的步骤:
7.a1.任意选取一种地铁车辆车型,根据车型的转向架定距i以及车长i用于设定车体函数表达式;
8.b1.任意选取一种地铁缓和曲线的工况,设x轴负半轴为地铁直线线路,坐标轴原点为直缓点,根据缓和曲线的总长、线性、最大半径拟合出缓和曲线的函数表达式式中,r表示目标圆曲线半径,单位m,l表示缓和曲线的总长度,单位m;
9.c1.求出车体函数l
ab
的函数表达式,设动点a落在直线上、动点b落在缓和曲线上,此发明专利针对列车运行在直缓段,因此,动点a其坐标为(xa,0)且xa∈[-i,0],由拟合的缓和曲线可知,动点b的坐标为设列车转向架定距为im,因此线段l
ab
恒等于im,
根据两点距离公式,可列出动点a和动点b之间的距离方程式:在已知曲线函数和列车后转向架中心点a的坐标后,可以通过距离方程式确定列车前转向架中心点b点的坐标值以及动点a、b之间的函数关系,在得出列车前后转向架中心点b、a坐标后,可列出车体函数l
ab
的表达式:
[0010]
d1.通过车体函数l
ab
斜率,确定辅助线l
cd
的斜率,从车体函数l
ab
的表达式中可知斜率所构造的辅助线l
cd
与车体函数l
ab
恒垂直,可求得l
cd
的斜率:
[0011]
e1.求解l
cd
的最大值,求取最大值的过程关键在于确定动点d的坐标,对缓和曲线求导找出满足y
′d=k
ab
的动点d,满足条件的动点d即是l
cd
取到最大值的位置,在d点处对缓和曲线函数求导必须满足y
′
缓和曲线
=k
ab
,其中y
′
缓和曲线
为缓和曲线的导数,算得x取正值,用转向架前后转向架中心点的横坐标xb、xa来表示动点
[0012]
算得动点d的坐标和l
cd
的斜率k
cd
后,可求出线段l
cd
的表达式:的表达式:设l
cd
与l
ab
的交点为c点,联立两直线方程式可求出c点的坐标:解方程式可得c点坐标(xc,yc):
[0013]
其中
[0014]
其中
[0015]
最后对c点和d点坐标使用一次两点距离方程即可求出l
cd
的值:的值:式中,l
cd
为车体几何偏移产生的内侧曲线加宽值,单位mm;
[0016]
s2,考虑直缓段处线路超高产生的垂向内侧限界加宽值,包括以下步骤:
[0017]
列车处于直缓段时,前转向架中心点b点已经落在了缓和曲线上,此种情况下线路的超高并不大,因此可以直接考虑超高最大值的状态,即为后转向架落到直缓点的情况,为确保限界安全可设l
临
为定值,取近似值im,已知圆曲线超高的计算公式根据已知圆曲线超高公式计算直缓段的超高:知圆曲线超高公式计算直缓段的超高:最终直缓段处因线路超高产生的内侧限界加宽值计算公式为:h
max
为目标圆曲线的超高值,单位mm,v为过圆曲线时列车的设计速度,单位m/s,r为圆曲线的半径,单位m,h
zh
为计算直缓段线路加宽用到的曲线超高值,单位mm,h为限界控制点自轨面的高度,单位mm,i为车体的总长度,单位m,l
临
为从直缓点算起至列车行驶到缓和曲线上任意一点的距离,单位m,l
总
为缓和曲线总长度,单位m,1500为钢轨中心距,单位mm,w
zhv
为直缓段处因线路超高产生的加宽值,单位mm;
[0018]
s3,考虑缓和曲线上列车内侧限界总加宽,其特征在于,包括下列公式:
[0019]
式中,wi为直缓段处车辆总的内侧加宽值,单位mm;
[0020]
s4,考虑缓和曲线外侧限界加宽,其特征在于,包括以下小步骤:
[0021]
a4.对列车过缓和曲线求解外侧加宽值的方法,定义g(xg,yg)、e(xe,ye)、h(xh,yh)、f(xf,yf)四点;
[0022]
b4.设点a(xa,ya)为列车后转向架中心点,b(xb,yb)为列车前转向架中心点,地铁列车总车长l
ef
=i(m)、转向架定距l
ab
=i(m),可知设动点e(xe,ye)、f(xf,yf);
[0023]
c4.求列车车尾外侧曲线加宽:
[0024]
由可列长度方程在已知a点坐标的情况下,很容易算出e点坐标(xe,ye),再做垂直于l
ef
的直线l
eg
;
[0025]
联立直线l
eg
和缓和曲线方程即可求出g点坐标(xg,yg),最后计算出来的就是列车车尾外侧曲线加宽;
[0026]
d4.求列车车头外侧曲线加宽:
[0027]
由可列长度方程在已知b点坐标的情况下,很容易算出f点坐标(xf,yf),做垂直与l
ef
的直线l
hf
;
[0028]
联立l
hf
和圆曲线方程即可求出h点坐标(xh,yh),最后计算出来的就是列车车尾外侧曲线加宽;
[0029]
其中:
[0030]
其中:
[0031]
式中,w
车头
为列车行驶在缓和曲线处车头的外侧曲线加宽值,单位mm,w
车尾
为列车行
驶在缓和曲线处车尾的外侧曲线加宽值,单位mm;
[0032]
s5,用最小二乘法拟合列车过缓和曲线时的加宽函数,其特征在于,包括以下步骤:
[0033]
a5.确定列车后转向架xa的取值范围,设列车后转向架中心点为点a(xa,ya),那么(-i≤xa≤x
直缓点
);
[0034]
b5.对xa在(-i≤xa≤x
直缓点
)平均取点,以这些点为基准,求解列车相对应的内侧最大偏移点c(xc,yc)的坐标;
[0035]
c5.对xa在(-i≤xa≤x
直缓点
)平均取点,以这些点为基准,求出相对应的车尾最大偏移点e(xe,ye)、车头最大偏移点f(xf,yf)的坐标;
[0036]
d5.用最小二乘法对s1、s2、s3、s4中所求的点进行函数拟合,最终求出在直缓段车体函数内外侧加宽函数曲线。
[0037]
优选的,考虑车体几何偏移产生的内侧限界加宽计算方法,其中:s1的步骤a1中i为车辆转向架定距长度,单位m,i为车体车长长度,单位m,此算法适应与任意车型的限界加宽计算,s1的步骤b1中r代表缓和曲线后圆曲线的半径,单位m,l代表缓和曲线总长度,单位m,s1的步骤c1中动点b(xb,yd)代表列车前转向架中心点,动点a(xa,ya)代表列车后转向架中心点,l
ab
代表车体函数,此算法适应与任意铁路直缓段工况的限界计算,母的在于建立直角坐标系对s1的步骤a1、b1的缓和曲线、直线进行拟合,建立车体函数便于监测车体的运动轨迹,s1的步骤d1中的l
cd
代表计算内侧曲线加宽值所拟定的辅助线,垂直于车体函数l
ab
,其目的在于通过车体函数l
ab
的斜率,以及两者的垂直关系得到辅助线l
ab
的斜率,s1的步骤e1中的点d(xd,yd)表示运动在缓和曲线上的动点,c(xc,yc)表示车体因几何偏移产生的最大偏移点,y
′d表示对缓和曲线求导后找出的满足条件的一个动点,l
cd
表示车体几何偏移产生的内侧限界加宽,k
ab
表示车体函数l
ab
的斜率,y
′
缓和曲线
为缓和曲线的导数,其目的是应用导函数的几何意义求解车体几何偏移产生的内侧限界加宽。
[0038]
优选的,考虑缓和曲线线路超高产生的垂向内侧限界加宽值计算方法,其中:步骤s2中h
max
为目标圆曲线的超高值,单位mm,v为过圆曲线时列车的设计速度,单位m/s,r为圆曲线的半径,单位m,h
zh
为计算直缓段线路加宽用到的曲线超高值,单位mm,h为限界控制点自轨面的高度,单位mm,i为车体的总长度,单位m,l
临
为从直缓点算起至列车行驶到缓和曲线上任意一点的距离,单位m,l
总
为缓和曲线总长度,单位m,1500为钢轨中心距,单位mm,w
zhv
为直缓段处因线路超高产生的加宽值,单位mm。
[0039]
优选的,考虑缓和曲线上列车内侧限界总加宽,其中:s3中wi代表列车过直缓段时总的内侧加宽值,单位mm。
[0040]
优选的,考虑直缓段外侧限界加宽计算方法,其中:s4的步骤a4中定义g(xg,yg)、e(xe,ye)、h(xh,yh)、f(xf,yf)四点,s4的步骤b4中的l
ef
代表列车总车长,s4的步骤c4中l
eg
=w
车尾
代表列车车尾外侧加宽值,单位mm,l
ea
代表车尾到后转架的距离,l
bf
代表车头到前转向架的距离,单位m,l
hf
=w
车头
代表列车车头外侧加宽值,单位mm。
[0041]
优选的,考虑直缓段内外侧限界加宽曲线计算方法,其中:s5的步骤a5中定义的x
直缓点
为直缓点的横坐标,目的在于使用最小二乘法拟合各点最后得到直缓段限界加宽曲线。
附图说明
[0042]
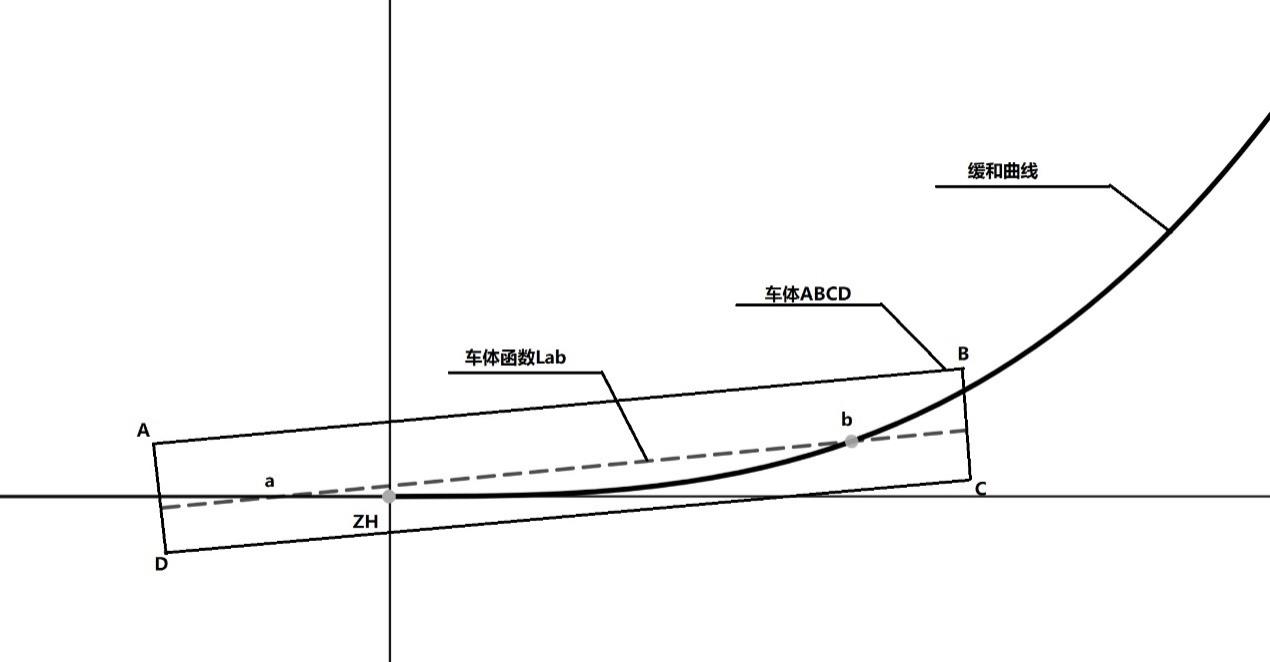
图1为本发明实施例中车体在直缓段的拟合示意图;
[0043]
图2为本发明实施例中直缓段线路拟合图;
[0044]
图3为本发明实施例中车体在直缓段的拟合简化图;
[0045]
图4为本发明实施例中车体在直缓段的拟合简化图;
[0046]
图5为本发明实施例中列车在直缓段曲线处的外侧加宽曲线;
[0047]
图6为本发明实施例中列车在直缓段曲线处的内侧侧加宽曲线;
具体实施方式
[0048]
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
实施例一:选用总车长长度为22.1m、转向架定距为15.7m的地铁a型车,以总长为50m、目标圆曲线半径为200m的缓和曲线工况为实施例对本发明专利进行详细的阐述说明,此工况下的h
max
=120mm、通过确定a型车危险点h值取3231mm,包括以下实施步骤:
[0050]
s2,实施例表述的是列车前转向架中心点落在圆曲线上、后转向架中心点落在缓和曲线的工况,在此工况下求解列车因几何偏移照成的内侧曲线加宽值:
[0051]
为便于分析,构造坐标系;如附图1所示,定义坐标系原点为直缓(zh)点(直线和缓和曲线的切点,标注时用zh表示);直缓(zh)点到圆缓(yh)点(圆缓点是缓和曲线的终点和下一段圆曲线的起点相交的点)之间的曲线为缓和曲线;圆缓(yh)点之后为圆曲线;长方形abcd表示地铁a型车车体;定义虚线l
ab
为车体函数;l
ab
与曲线相交的动点b、a分别代表列车的前后转向架中心点。
[0052]
根据《地铁设计规范》规定:线路平面圆曲线与直线之间应根据曲线半径、超高设置及设计速度等因素设置缓和曲线,常用的缓和曲线为三次方抛物线型起方程为:
[0053][0054]
式中,l是缓和曲线总长度,m;r是圆曲线半径,m。
[0055]
假设现已知车辆后转向架中心a点坐标(xa,ya),以此为条件求解车辆对应的最大内侧加宽值l
cd
,求解思路如下:
[0056]
首先,确定列车处于直线段上后转向架中心点a的横坐标xa的取值范围,当xa≤-15.7时列车前后转向架都处在直线段上,当-15.7≤xa时列车进入直缓段,当0≤xa列车则完全进入缓和曲线,因此xa∈[-15.7,0]。
[0057]
对前转向架中心点落在缓和曲线上,后转向架中心点落在直线段上的直缓段曲线加宽进行分析前,需确定各点、曲线以及车体函数的表达式,如附图二所示,对r=200m、l=50m的工况进行函数拟合,拟合缓和曲线的表达式为三次方函数:拟合直线表达式为函数:y=0[x≤0];直缓点为坐标轴原点(0,0),动点a为列车后转向架、动点b为列车前转向架,依据地铁a型车的标准尺寸设线段l
ab
=15.7m。
[0058]
接着,求线段l
cd
的最大长度即是车体最大的内侧偏移量,直线l
cd
是计算内侧曲线
加宽值所拟定的辅助线,车辆内侧偏移点c落在车体函数l
ab
上,动点d落在曲线上,辅助线l
cd
垂直于车体函数l
ab
;如附图3所示,l
cd
在l
ab
与曲线形成的封闭平面内任意的移动,l
cd
的长度随着列车后转向架中心点a的变化而变化,此过程中可取到无数条l
cd
,对曲线的某一个点进行求导(此点为上述定义的动点d),当动点d的曲线导数值与车体函数l
ab
的斜率k
ab
相等时,就是l
cd
取到最大值的位置。
[0059]
最后,再考虑超高对车辆限界加宽带来的影响,具体的求解数理推导过程如下:
[0060]
第一步,求出车体函数l
ab
的函数表达式;由拟合曲线的表达式可知,动点a的坐标为(xa,0)、动点b的坐标为已知地铁a型车转向架定距为15.7m,因此线段l
ab
恒等于15.7m,根据两点距离公式,可列出动点a和动点b之间的距离方程式:在已知曲线函数和列车后转向架中心点a的坐标后,可以用此公式确定列车前转向架b点的坐标值以及动点a、b之间的函数关系,函数关系如下:化简可得:
[0061][0062]
因xa<xb,可确定xa与xb之间的关系:
[0063][0064]
根据动点a、b的坐标,列出车体函数l
ab
的表达式:
[0065][0066]
第二步,通过车体函数l
ab
斜率,确定辅助线l
cd
的斜率:
[0067][0068]
所构造的辅助线l
cd
与车体函数l
ab
恒垂直,可求得l
cd
的斜率:
[0069][0070]
第三步,求l
cd
的最大值,求取最大值的过程关键在于确定动点d的坐标,对缓和曲线或圆曲线求导找出满足y
′d=k
ab
的动点d,满足条件的动点d即是l
cd
取到最大值的位置;
[0071][0072]
式中,y
′
缓和曲线
为缓和曲线的导数;k
ab
为车体函数的斜率。
[0073]
可得xd用a、b坐标表示的解析式:
[0074][0075]
xd取正值,可用(xa,ya)、(xb,yb)来表示d点坐标:
[0076][0077]
第四步,求解车辆内侧偏移点c点的坐标,方法如下联立两直线方程式可求出c点的坐标:
[0078][0079][0080][0081]
最后对c点和d点坐标使用一次两点距离方程即可求出l
cd
的值:的值:式中,l
cd
为车体几何偏移产生的内侧曲线加宽值,单位mm。
[0082]
车辆内侧偏移点c点可用a、b两点的坐标来表示:
[0083][0084]
式中,l
cd
为车体几何偏移产生的内侧曲线加宽值,单位mm。
[0085]
s2,实施例表述的是列车前转向架中心点落在缓和曲线上、后转向架中心点落在直线段的工况,在此工况下求解列车因线路超高照成的内侧曲线加宽值:
[0086]
列车处于直缓段时,前转向架中心点b点已经落在了缓和曲线上,此种情况下超高并不大,因此可以直接考虑超高最大值的状态,即为后转向架落到直缓点的情况。因此l
临
可
取地铁a型车的转向架定距15.7m。
[0087]hmax
=120mm
ꢀꢀ
(14)
[0088][0089][0090]
式中,h
max
为目标圆曲线的超高值,单位mm,v为过圆曲线时列车的设计速度,单位m/s,r为圆曲线的半径,单位m,h
zh
为计算直缓段线路加宽用到的曲线超高值,mm,h代表限界控制点自轨面的高度,单位mm,i为车体的总长度,单位m,l
总
为缓和曲线总长度,单位m,1500为钢轨中心距,单位mm,w
zhv
为直缓段处因线路超高产生的加宽值,单位mm。
[0091]
s3,实施例表述的是列车前转向架中心点落在缓和曲线上、后转向架中心点落在直线上的工况,在此工况下求解列车总的内侧曲线加宽值:
[0092][0093]
式中,wi为直缓段处,车辆总的内侧加宽值,单位mm。
[0094]
s4,实施例表述的是列车前转向架中心点落在缓和曲线上、后转向架中心点落在直线段的工况,在此工况下求解列车外侧曲线加宽值:
[0095]
研究考虑的是对列车前转向架落在缓和曲线上,后转向架落在直线的情况下求解外侧加宽值的方法,如附图4所示。
[0096]
根据车辆后转向架中心点所在坐标a(xa,ya)求车体的最大外侧曲线加宽值,求解的思路如下:
[0097]
第一步,设点a(xa,ya)为列车后转向架中心点,b(xb,yb)为列车前转向架中心点,地铁a型车总车长l
ef
=22.1m、转向架定距l
ab
=15.7m,可知l
ea
=3.2m,设动点e(xe,ye)、f(xf,yf)。
[0098]
第二步,求列车车尾外侧曲线加宽:
[0099]
由l
ea
=3.2m可列长度方程在已知a点坐标的情况下,很容易算出e点坐标(xe,ye),再做垂直与l
ef
的直线l
eg
。
[0100]
联立直线l
eg
和直线方程即可求出g点坐标(xg,yg),最后计算出来的就是列车车尾外侧曲线加宽。
[0101]
第三步,求列车车头外侧曲线加宽:
[0102]
由l
bf
=3.2m可列长度方程在已知b点坐标的情况下,很容易算出f点坐标(xf,yf),做垂直与l
ef
的直线l
hf
。
[0103]
联立l
hf
和缓和曲线的方程即可求出h点坐标(xh,yh),最后计算出来的就是列车车尾外侧曲线加宽。
[0104][0105][0106]
式中,w
车头
为列车运行在直缓段处车头处的外侧曲线加宽值,单位mm;w
车尾
为列车运行在直线段处车尾处的外侧曲线加宽值,单位mm。
[0107]
s5,收集s1、s2、s3、s4中得到的车尾最大偏移点e(xe,ye)、车头最大偏移点f(xf,yf)的坐标、内侧最大偏移点c(xm,ym)的坐标。最终求出在直缓段处车体函数内外侧加宽函数曲线,如附图5、6所示。
[0108]
本发明优点是:根据经验,地铁限界尺寸毫米级的优化或者改动,往往会引起土建工程费用千万元级的变化。所以,确定一个既能保证车辆运行安全,又不增大隧道空间的经济、合理的断面尺寸,是地铁限界设计的任务和目的,后期可以编写程序带入不同列车过缓和曲线工况数据,利用计算机进自动计算,可以节省大量的人力、物力,缩短设计周期,提高设计计算精度。
[0109]
尽管已以及解释和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1