基于光谱纹理特征和K近邻法的小麦倒伏区域识别方法
基于光谱纹理特征和k近邻法的小麦倒伏区域识别方法
技术领域
1.本发明涉及数字图像处理领域和农业信息化领域,特别涉及一种基于光谱纹理特征和k近邻法的小麦倒伏区域识别方法。
背景技术:
2.目前,常用的获取倒伏灾情信息的方法是实地测量(又被称为目视评估法):由调查人员前往受灾区域,使用gps定位器、卷尺、绳索等工具测量倒伏角点的地理坐标和倒伏范围,进而计算倒伏面积。
3.该技术方案具有较大的主观性且容易受到天气、周围环境等因素的影响,存在着测量结果容易引起争议、精度差、效率低等问题,无法满足农业部门“第一时间”、“及时掌握”的要求,会耽搁有关部门组织专家制定相应措施,不利于及时发放救灾资金和灾后生产恢复。
技术实现要素:
4.无人机遥感具有大面积同步观测、高时效性、高准确度、经济实用等优点,已经在农业领域得到了广泛的应用。
5.基于此,本发明的目的是提供一种基于光谱纹理特征和k近邻法的小麦倒伏区域识别方法,用以对小麦倒伏区域进行高精准检测。
6.为达到以上目的,本发明采取的技术方案是:
7.一种基于光谱纹理特征和k近邻法的小麦倒伏区域识别方法,包括如下步骤:
8.1、将多光谱传感器装配在无人机平台上;
9.2、通过无人机获取研究区域的多幅多光谱遥感影像;
10.3、基于每幅多光谱遥感影像中的每个像元的地理坐标信息,将对应于同一地块的不同波段、不同组次的多光谱遥感影像进行匹配融合与拼接,生成多幅多通道的多光谱遥感影像;
11.4、通过目视估测的方式,按照倒伏和非倒伏两类,对匹配融合与拼接后的多光谱遥感影像进行剪裁,剪裁成视场中仅包含倒伏区域或仅包含非倒伏区域的影像,作为原始数据集;
12.5、基于主成分分析,分析原始数据集中所有影像的主成分,计算所有影像的前两个主成分的纹理特征和所有影像中每个像元在各个波段的光谱反射率,并打包生成新数据集;
13.6、将新数据集分为两部分:80%为样本集,20%为测试集;
14.7、构建k近邻模型,将样本集输入到k近邻模型中进行训练,用测试集验证模型的精度,当精度达到90%以上时视为训练成功;
15.8、预设窗口大小,调用训练成功的k近邻模型判别每个窗口的类型;
16.9、统计出所有倒伏区域的像元个数,进一步计算出倒伏区域的总面积。
17.其中,步骤5具体包括:
18.步骤51:基于主成分分析的方法对原始数据集中每一幅影像进行主成分分析,从而降低数据冗余。
19.步骤52:计算每一幅影像前两个主成分的纹理特征;
20.采用灰度共生矩阵的方法来计算纹理特征。
21.步骤53:统计每幅影像每个像元在各个波段的光谱反射率值。
22.步骤7中,将测试集输入到k近邻模型中,通过五折交叉验证的方法确定k值:对模型进行多次预训练,进而得到每次预训练的平均精度,选择对应平均精度最高的k作为k值;五折交叉验证的公式为:
[0023][0024]
式中:cv为每次预训练中五组训练结果的平均精度,accuracy为精度。
[0025]
步骤8具体包括:
[0026]
步骤81:以步骤5生成的新数据集中尺寸最小的图片的尺寸作为窗口,窗口在待提取倒伏区域的目标影像上平移,将待目标影像划分成多个栅格。
[0027]
步骤82:调用训练完成的k近邻模型对每个栅格进行分类,倒伏区域和非倒伏区域用不同的颜色表示。
[0028]
步骤9具体包括:统计倒伏区域的像元总数,而后根据以下公式计算得到每个像元对应的实地面积s:
[0029][0030]
式中:n代表图像的分辨率;s代表传感器的尺寸面积;f代表传感器获取影像时的焦距;μ代表获取影像时的物距。
[0031]
本发明的有益效果:本发明利用无人机遥感,基于光谱纹理特征和k近邻法地小麦倒伏区域识别方法,可实时高效地统计出所有倒伏区域的像元个数,进一步高精准的求出倒伏区域的面积。
附图说明
[0032]
本发明有如下附图:
[0033]
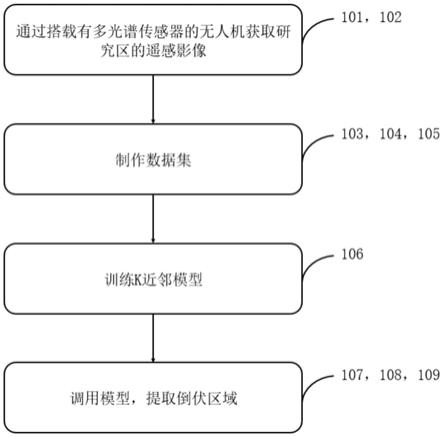
图1:本发明提供的一种基于光谱纹理特征和k近邻法的小麦倒伏区域识别方法的流程图;
[0034]
图2:本发明所涉及的k近邻法的算法示意图;
[0035]
图3:本发明所采用的五折交叉验证示意图;
[0036]
图4中,a图为小麦倒伏区域的rgb图像,b图为本发明提供的一种基于光谱纹理特征和k近邻法的小麦倒伏区域识别方法提取图像的效果图。
具体实施方式
[0037]
以下结合附图对本发明作进一步详细说明。
[0038]
如图1
‑
4所示,一种基于光谱纹理特征和k近邻法的小麦倒伏区域识别方法,包括如下步骤:
[0039]
步骤101:将多光谱传感器装配在无人机平台上;
[0040]
步骤102:通过无人机对小麦农田进行拍摄,获取研究区域的多幅多光谱影像;
[0041]
步骤103:基于获取到的每幅多光谱遥感影像中的每个像元的地理坐标信息,将对应于同一地块的不同波段、不同组次的多光谱遥感影像进行匹配融合与拼接,生成多幅包含有多个通道的多光谱遥感影像。
[0042]
步骤104:通过目测估计的方式,按照倒伏和非倒伏两种类别,对匹配融合与拼接后的多光谱遥感影像进行裁剪,生成视场中仅包含有倒伏区域或非倒伏区域的影像,作为原始数据集。
[0043]
步骤105:基于主成分分析,计算原始数据集中所有影像的前两个主成分的纹理特征和所有影像中每个像元在各个波段的光谱反射率,并将所有影像的前两个主成分的纹理特征和所有影像中每个像元在各个波段的光谱反射率打包生成新数据集。
[0044]
步骤106:将新数据集分为两部分,80%作为样本集,20%作为测试集;将样本集输入到k近邻模型中进行训练,用测试集验证模型的精度,当精度达到90%以上时视为训练成功。
[0045]
步骤107:根据新数据集中最小的图像尺寸,预设窗口大小。调用训练成功的k近邻模型,判别每个窗口的类型,统计出所有倒伏区域的像元总数,换算求得倒伏区域的总面积。
[0046]
其中,步骤105具体包括:
[0047]
步骤1051:基于主成分分析的方法对原始数据集中每一幅影像进行主成分分析,从而降低数据冗余。
[0048]
主成分分析,是图像处理中经常用到的降维方法,在处理有关数字图像处理方面的问题时,比如经常用的图像的查询问题,在一个几万或者几百万甚至更大的数据库中查询一幅相近的图像。这时,通常的方法是对图像库中的图片提取响应的特征,如颜色,纹理,sift,surf,vlad等特征,然后将其保存,建立响应的数据索引,然后对要查询的图像提取相应的特征,与数据库中的图像特征对比,找出与之最近的图片。
[0049]
步骤1052:计算每一幅影像前两个主成分的纹理特征;
[0050]
纹理特征是从图像中计算出来的一个值,对区域内部灰度级变化的特征进行量化,不是基于像元点的特征,需要在包含多个像元点的区域中进行统计计算,具有旋转不变性,且对噪声有较强的抵抗能力;适用于检索具有粗细、疏密等方面较大差别的纹理图像。
[0051]
采用灰度共生矩阵的方法来计算纹理特征:
[0052]
灰度共生矩阵就是从n
×
n的图像f(x,y)的灰度为i的像元出发,统计与i距离为δ=(dx2+dy2)^1/2,灰度为j的像元同时出现的概率p(i,j,δ,θ)。用数学表达式为:
[0053]
p(i,j,δ,θ)={[(x,y),(x+dx,y+dy)]|f(x,y)=i,f(x+dx,y+dy)=j}
[0054]
其中,δ为(x,y)与(x+dx,y+dy)间的距离,θ为方位角,即两个像元所连成的直线与水平方向的夹角。
[0055]
步骤1053:统计每幅影像每个像元在各个波段的光谱反射率值。
[0056]
步骤106具体包括:
[0057]
步骤1061:将20%的新数据集作为测试集;
[0058]
步骤1062:将测试集输入到k近邻模型中,通过五折交叉验证的方法确定k值。具体为:对模型进行多次预训练(每次预训练的k值不同),进而得到每次预训练的平均精度,选择对应平均精度最高的k作为k值,如附图3所示,五折交叉验证的公式为:
[0059][0060]
式中:cv为每次预训练中五组训练结果的平均精度,accuracy为精度。
[0061]
步骤107具体包括:
[0062]
步骤1071:以步骤105生成的新数据集中尺寸最小的图片的尺寸作为窗口,窗口在待提取倒伏区域的目标影像上平移,将待目标影像划分成多个栅格。
[0063]
步骤1072:调用训练完成的k近邻模型对每个栅格进行分类,倒伏区域和非倒伏区域用不同的颜色表示。
[0064]
步骤1073:统计倒伏区域的像元总数,而后根据公式可以计算得到每个像元对应的实地面积s:
[0065][0066]
式中:n代表图像的分辨率;s代表传感器的尺寸面积;f代表传感器获取影像时的焦距;μ代表获取影像时的物距,也即传感器距离地面的高度。
[0067]
以上实施方式仅用于说明本发明,而并非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的实质和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本发明的保护范围。
[0068]
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1