一种基于联合滤波的空气污染物浓度监测装置、监测系统及其监测方法
1.本发明属于空气污染监测领域;具体涉及一种基于联合滤波的空气污染物浓度监测装置、监测系统及其监测方法。
背景技术:
2.随着我国经济的快速发展,人民生活水平得到很大的提高,但是也带来了空气污染等问题,工厂废气、汽车尾气和燃煤取暖导致了越来越多的空气污染,大气污染不仅影响着人们的生产生活,同时也对人们的身体健康造成了很大的影响。近年来中国的空气质量远低于世界卫生组织(who)的建议标准,细颗粒物污染已成为对人体健康、国民经济产生重要影响的极端环境和社会问题。面对严峻的细颗粒物污染问题,政府也在积极采取各种综合治理措施,在治理空气污染的过程中,对于空气空气污染浓度的监测至关重要。监测空气中的细颗粒污染物极易受气压、气流、光照、温湿度和环境特征等因素的影响,使得传感器测出来的数据不准确。如何准确监测空气污染物浓度是一个很有意义的课题。
3.目前的研究大多数是直接使用单个传感器所测的空气污染浓度作为监测结果,这样得到的结果不够精确;也有经过简单的处理来提高空气污染物浓度的测量精度,例如采用粒子滤波、卡尔曼滤波、kz滤波、冲击响应滤波等方法进行过滤,但是当风速、气压等因素短时间剧烈变化时会导致传感器所测量的污染物浓度存在较大的误差。
技术实现要素:
4.本发明一种基于联合滤波的空气污染物浓度监测装置、监测系统及其监测方法,用以解决单个传感器因空气湿度、气压、风速等因素导致测量不准的问题。
5.本发明通过以下技术方案实现:
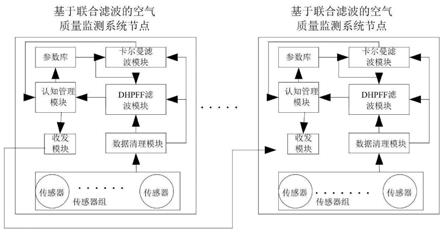
6.一种基于联合滤波的空气污染物浓度监测装置,所述装置包括多个节点装置,所述节点装置包括传感器组、数据清理模块、dhpff滤波模块、卡尔曼滤波模块、参数库、认知管理模块和收发模块;
7.所述传感器组与数据清理模块相连接,所述数据清理模块分别与dhpff滤波模块和卡尔曼滤波模块相连接,所述dhpff滤波模块分别与卡尔曼滤波模块和参数库相连接,所述卡尔曼滤波模块分别与认知管理模块和参数库相连接,所述认知管理模块与收发模块相连接。
8.一种基于联合滤波的空气污染物浓度监测系统,所述系统包括传感器组、数据清理模块、dhpff滤波模块、卡尔曼滤波模块、参数库、认知管理模块和收发模块;
9.所述传感器组将信号传输至数据清理模块,所述数据清理模块分别将信号传输至dhpff滤波模块和卡尔曼滤波模块,所述卡尔曼滤波模块与dhpff滤波模块均将信号传输至认知管理模块,所述认知管理模块分别将信号传输至收发模块和参数库,所述参数库分别将信号传输至dhpff滤波模块和卡尔曼滤波模块。
10.一种基于分布式卡尔曼滤波的空气污染物浓度监测系统的监测方法,所述监测方法具体包括以下步骤:
11.步骤1:利用空气污染物浓度监测系统得到多个时隙之间的时序滤波;
12.步骤2:利用空气污染物浓度监测系统得到单个时隙上的由多个传感器执行的空间滤波;
13.步骤3:利用步骤1多个时隙之间的时序滤波和步骤2的单个时隙上的空间滤波,根据滤波结果更新时序滤波参数。
14.进一步的,所述步骤1中得到多个时隙之间的时序滤波具体包括以下步骤:
15.步骤1.1:在任意的时隙t
k
,对任意节点node
i
,空气质量检测结果的直接观测值为状态矩阵a
ki
;
16.步骤1.2:对步骤1.1的节点node
i
的所有历史时刻的空气质量检测结果的修正观测值和当前时刻的空气质量检测结果的直接观测值组成向量p
aki
=(b
1i
,b
2i
,
…
,b
(k
‑
1)i
,a
ki
),对向量p
aki
进行dhpff滤波,得到当前时隙t
k
的空气质量检测结果的直接观测值为b
ki
;
17.步骤1.3:对集合node中所有节点(node1,node2,
…
,node
n
)进行dhpff滤波,得到当前时隙t
k
的空气质量检测结果的修正观测值集合{b
k1
,b
k2
,
…
,b
kn
};
18.步骤1.4:若某一结点node
z
处于非活跃态,则b
kz
为空。
19.进一步的,所述步骤2中得到单个时隙上的空间滤波具体包括以下步骤:
20.步骤2.1:在任意一个时隙t
k
,按照节点编号顺序,所有处于活跃态节点组成一个有向无环图;
21.步骤2.2:在簇头节点,按照步骤2.1的有向无环图方向,将所有图中节点的空气质量检测结果的状态矩阵b
ki
构成一个序列,即s
k
=(b
k1
,b
k2
,
…
,b
ks
);
22.步骤2.3:对步骤2.2的序列s
k
执行卡尔曼滤波,滤波结果记为c
k
;
23.步骤2.4:步骤2.2的滤波结果c
k
为当前时隙t
k
的空气质量检测的最终结果。
24.进一步的,所述步骤3中根据滤波结果更新时序滤波参数具体为,滤波结果c
k
,由每一个节点的认知管理模块进行决策,是否更新本地节点的时序滤波参数,即dhpff滤波模块的参数。
25.本发明的有益效果是:
26.本发明通过综合多个传感器、滤波技术和认知计算来处理空气污染物浓度的监测数据,使其监测更准确。
27.本发明在空气湿度、气压、风速变化剧烈时具有更好的鲁棒性。
28.本发明采用分布式结构能够应对单个传感器失效、重启和故障的情况。
附图说明
29.附图1是本发明的系统框架图。
30.附图2是本发明具体实施方式场景中传感器分布图。
具体实施方式
31.下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本
发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.监测系统由一组节点组成,记为node={node1,node2,
…
,node
n
},这些节点中包含1个簇头节点,其余为普通节点;这些节点按照设定的时隙(t0,t1,
…
,t
m
)监控空气质量。
33.对于其中任意的node
i
包含8个模块,分别是传感器组、数据清理模块、dhpff(distributed hybridparticle/finite impulse response filter)滤波模块、卡尔曼滤波模块、参数库、认知管理模块、存储器和收发模块组成,这些模块之间的关系遵循如下规则:
34.(1)传感器组包含一组数传感器,用于收集空气的不同参数,如pm10、pm2.5、so2等。传感器组的感知结果发送给数据清理模块。
35.(2)数据清理模块接收来自传感器组的数据,进行数据清理,例如删除空数据包、校验和错误的数据包等。数据清理模块的输出结果发送给dhpff滤波模块和卡尔曼滤波模块。
36.(3)dhpff滤波模块根据当前时刻之前的历史记录和输入的当前时刻的空气质量监测数据执行现有方法的dhpff滤波,以避免空气质量在不同时隙剧烈波动。如果当前节点是簇头,则dhpff滤波模块的输出结果将发送给卡尔曼滤波模块,同时在存储模块中进行记录;若否将dhpff滤波模块的输出结果d
i
发送给认知管理模块,同时在存储模块中进行记录。
37.(4)卡尔曼滤波模块仅在当前节点是簇头时开启,当为普通节点时休眠。卡尔曼滤波模块首先接收到dhpff滤波模块直接交付的数据或者收发模块间接的数据。其次,卡尔曼滤波模块接收参数库发送的当前时刻所有节点的有向无环图。再次,按照有向无环图顺序,将当前时刻所有节点的空气质量监测结果作为输入执行卡尔曼滤波。最后将卡尔曼滤波结果k,发送给认知管理模块。
38.(5)参数库包含了4项功能。一是设置dhpff滤波的参数,这些参数在开机时刻由用户根据历史记录设定,在系统运行过程中,在每个时隙的初始时刻,由认知模块根据积累的历史记录控制参数库进行更新。二是设置簇头节点的卡尔曼滤波模块的参数,这些参数在开机时刻由用户根据历史记录设定。三是对于簇头节点,在每个时隙的初始时刻,根据普通节点与簇头节点的交互搜索当前时刻所有处于活跃态的节点信息,所有处于活跃态的节点按照编号组成一个有向无环图。
39.(6)认知管理模块负责接收卡尔曼滤波模块的滤波结果、dhpff滤波模块的结果,进行认知学习,最后输出认知指令。首先,当前节点为簇头节点时,直接接收到卡尔曼滤波模块的滤波结果k;否则认知管理将把滤波结果k通过收发模块转发给所有其他节点。其次,认知管理模块收到滤波结果k和本节点的dhpff滤波模块的结果,此时将进行认知学习,输出结果为0或1;当结果为1时,向参数库发送指令将该节点在下一个时隙屏蔽一个时隙,即在下一个时隙设置为非活跃态。此外,每个时隙初始时刻,根据存储模块中记录的空气质量结果历史记录,输出认知指令更新参数库中dhpff滤波的参数。
40.认知管理模块的认知学习过程还包括如下特点:认知管理模块包含分析子模块、决策子模块、执行子模块和知识库。分析子模块将卡尔曼滤波模块的滤波结果、dhpff滤波模块的结果作为输入,进行规格化后得到一个输入矩阵,输入给决策子模块;决策子模块在
知识库的参与下进行有监督学习分类,分类结果是0或者是1。上述有监督学习方法包含卷积神经网络、图神经网络等方法。执行子模块根据分类结果向参数库发送指令。
41.(7)收发模块主要负责数据的接受和发送。一方面发送普通节点的dhpff滤波模块的结果给簇头节点;另一方面,发送簇头节点的卡尔曼滤波模块的滤波结果给所有其他节点。
42.一种基于联合滤波的空气污染物浓度监测装置,所述装置包括多个节点装置,所述节点装置包括传感器组、数据清理模块、dhpff滤波模块、卡尔曼滤波模块、参数库、认知管理模块和收发模块;
43.所述传感器组与数据清理模块相连接,所述数据清理模块分别与dhpff滤波模块和卡尔曼滤波模块相连接,所述dhpff滤波模块分别与卡尔曼滤波模块和参数库相连接,所述卡尔曼滤波模块分别与认知管理模块和参数库相连接,所述认知管理模块与收发模块相连接。
44.一种基于联合滤波的空气污染物浓度监测系统,所述系统包括传感器组、数据清理模块、dhpff滤波模块、卡尔曼滤波模块、参数库、认知管理模块和收发模块;
45.所述传感器组将信号传输至数据清理模块,所述数据清理模块分别将信号传输至dhpff滤波模块和卡尔曼滤波模块,所述卡尔曼滤波模块与dhpff滤波模块均将信号传输至认知管理模块,所述认知管理模块分别将信号传输至收发模块和参数库,所述参数库分别将信号传输至dhpff滤波模块和卡尔曼滤波模块。
46.一种基于分布式卡尔曼滤波的空气污染物浓度监测方法,所述监测方法具体包括以下步骤:
47.步骤1:利用空气污染物浓度监测系统得到多个时隙之间的时序滤波;
48.步骤2:利用空气污染物浓度监测系统得到单个时隙上的由多个传感器执行的空间滤波;
49.步骤3:利用步骤1多个时隙之间的时序滤波和步骤2的单个时隙上的空间滤波,根据滤波结果更新时序滤波参数。
50.进一步的,所述步骤1中得到多个时隙之间的时序滤波具体包括以下步骤:
51.步骤1.1:在任意的时隙t
k
,对任意节点node
i
,空气质量检测结果的直接观测值为状态矩阵a
ki
;
52.步骤1.2:对步骤1.1的节点node
i
的所有历史时刻的空气质量检测结果的修正观测值和当前时刻的空气质量检测结果的直接观测值组成向量p
aki
=(b
1i
,b
2i
,
…
,b
(k
‑
1)i
,a
ki
),对向量p
aki
进行dhpff滤波,得到当前时隙t
k
的空气质量检测结果的直接观测值为b
ki
;
53.步骤1.3:对集合node中所有节点(node1,node2,
…
,node
n
)进行dhpff滤波,得到当前时隙t
k
的空气质量检测结果的修正观测值集合{b
k1
,b
k2
,
…
,b
kn
};
54.步骤1.4:若某一结点node
z
处于非活跃态,则b
kz
为空。
55.进一步的,所述步骤1.2中的dhpff滤波发送至认知管理模块,所述认知管理模块的工作过程具体包括以下步骤:
56.步骤1.2.1:若当前节点为簇头节点时,则进行步骤1.2.2,若当前节点为普通节点时,则进行步骤1.2.3;
57.步骤1.2.2:直接接收到卡尔曼滤波模块的滤波结果k,进入步骤1.2.3或跳转到步
骤1.2.4;
58.步骤1.2.3:把滤波结果k通过收发模块转发给所有其他节点;
59.步骤1.2.4:认知管理模块收到滤波结果k和本节点的dhpff滤波模块的结果,此时将进行认知学习,输出结果为0或1;当结果为1时,则进行步骤1.2.5;当结果为0时,则进行步骤1.2.6;
60.步骤1.2.5:向参数库发送指令将该节点在下一个时隙屏蔽一个时隙,即在下一个时隙设置为非活跃态;
61.步骤1.2.6:每个时隙初始时刻,根据存储模块中记录的空气质量结果历史记录,输出认知指令更新参数库中dhpff滤波的参数。
62.进一步的,所述步骤2中得到单个时隙上的空间滤波具体包括以下步骤:
63.步骤2.1:在任意一个时隙t
k
,按照节点编号顺序,所有处于活跃态节点组成一个有向无环图;
64.步骤2.2:在簇头节点,按照步骤2.1的有向无环图方向,将所有图中节点的空气质量检测结果的状态矩阵b
ki
构成一个序列,即s
k
=(b
k1
,b
k2
,
…
,b
ks
);
65.步骤2.3:对步骤2.2的序列s
k
执行卡尔曼滤波,滤波结果记为c
k
;
66.步骤2.4:步骤2.2的滤波结果c
k
为当前时隙t
k
的空气质量检测的最终结果。
67.进一步的,所述步骤3中根据滤波结果更新时序滤波参数具体为,滤波结果c
k
,由每一个节点的认知管理模块进行决策,是否更新本地节点的时序滤波参数,即dhpff滤波模块的参数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1