物流系统、信息处理装置及方法与流程
1.本发明涉及一种物流系统、信息处理装置及方法。
背景技术:
2.以往,已知一种让机器人配送物品的系统,该系统具备管理物品库存的数据库(例如,专利文献1)。
3.[背景技术文献]
[0004]
[专利文献]
[0005]
[专利文献1]日本专利特开2018-151923号公报
技术实现要素:
[0006]
[发明要解决的问题]
[0007]
在专利文献1的系统中,有时工作人员将物品递交至机器人之后,工作人员所携带的病毒或细菌会附着在物品上。物品上附着的病毒或细菌的感染力大小会随着时间的经过而变小,因此要抑制该病毒或细菌感染物品的收件人,需要管理在收取物品之前包括工作人员在内的人接触物品的最后时刻、或从该最后时刻起算的经过时间。但在专利文献1的系统中,存在只能管理物品的库存,而无法管理人接触物品的最后时刻、及从该最后时刻起算的经过时间中任一者的问题。
[0008]
本发明是鉴于这一点而完成的,其目的在于提供一种能管理在收取物品之前人接触该物品的最后时刻、或从该最后时刻起算的经过时间的物流系统、信息处理装置及方法。
[0009]
[解决问题的技术手段]
[0010]
为了达成所述目的,本发明的第1形态的物流管理系统的特征在于,具备:
[0011]
第1物流机构,包含将物品搬运至所述物品的收件地的搬运机;及
[0012]
管理部,管理第1时刻、或从所述第1时刻起算的经过时间即第1经过时间,所述第1时刻是比收取由所述搬运机搬运的所述物品的收取时刻早的时刻,且是人接触所述物品的最后时刻。
[0013]
[发明的效果]
[0014]
根据本发明的物流系统、信息处理装置及方法,能管理在收取物品之前人接触该物品的最后时刻、或从该最后时刻起算的经过时间。
附图说明
[0015]
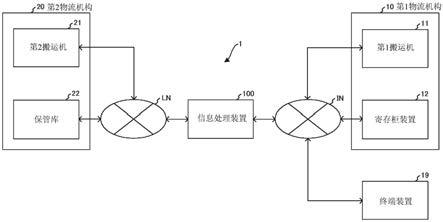
图1是表示本发明的实施例1的物流系统的一个构成例的系统构成图。
[0016]
图2是表示实施例1的第2搬运机的外观的一例的外观构成图。
[0017]
图3是表示第2搬运机所具备的控制装置的一个构成例的硬件构成图。
[0018]
图4是表示第2搬运机所执行的揽收处理的一例的流程图。
[0019]
图5是表示第2搬运机所执行的保管库搬运处理的一例的流程图。
[0020]
图6是表示保管库的外观的一例的外观构成图。
[0021]
图7是表示第2搬运机所执行的保管库储存处理的一例的流程图。
[0022]
图8是表示终端装置的一个构成例的硬件构成图。
[0023]
图9是表示实施例1的第2搬运机所执行的取出处理的一例的流程图。
[0024]
图10是表示第2搬运机所执行的递交处理的一例的流程图。
[0025]
图11是表示信息处理装置的一个构成例的硬件构成图。
[0026]
图12是表示信息处理装置所执行的前段控制处理的一例的流程图。
[0027]
图13是表示实施例1的信息处理装置所具有的功能的一例的功能框图。
[0028]
图14是表示信息处理装置所存储的步序表的一例的图。
[0029]
图15是表示信息处理装置所存储的第2时刻表的一例的图。
[0030]
图16是表示信息处理装置所存储的保管库表的一例的图。
[0031]
图17是表示信息处理装置所执行的第2时刻设定处理的一例的流程图。
[0032]
图18是表示信息处理装置所执行的第2时刻更新处理的一例的流程图。
[0033]
图19是表示实施例1的信息处理装置所执行的后段控制处理的一例的流程图。
[0034]
图20是表示信息处理装置所存储的物品表的一例的图。
[0035]
图21是表示信息处理装置所执行的第1时刻设定处理的一例的流程图。
[0036]
图22是表示信息处理装置所执行的第1时刻更新处理的一例的流程图。
[0037]
图23是表示信息处理装置所执行的通知处理的一例的流程图。
[0038]
图24是表示信息处理装置所执行的第2经过时间设定处理的一例的流程图。
[0039]
图25是表示信息处理装置所执行的第2经过时间重设处理的一例的流程图。
[0040]
图26是表示实施例1的变化例16的第1搬运机的外观的一例的外观构成图。
[0041]
图27是表示实施例2的信息处理装置所执行的后段控制处理的一例的流程图。
[0042]
图28是表示实施例2的信息处理装置所具有的功能的一例的功能框图。
[0043]
图29是表示实施例2的信息处理装置所执行的时机决定处理的一例的流程图。
[0044]
图30是表示实施例2的第2搬运机所执行的取出处理的一例的流程图。
[0045]
图31是表示信息处理装置所存储的物品编号表的一例的图。
[0046]
图32是表示信息处理装置所存储的类别表的一例的图。
[0047]
图33是表示实施例2的变化例3的信息处理装置所执行的时机决定处理的一例的流程图。
[0048]
图34是表示信息处理装置所存储的环境表的一例的图。
[0049]
图35是表示实施例2的变化例6的信息处理装置所执行的时机决定处理的一例的流程图。
具体实施方式
[0050]
<实施例1>
[0051]
以下,参照附图对本发明的实施例1进行说明。
[0052]
本发明的实施例1的物流系统1将所销售的物品搬运至由购买者指定的收件地。因此,物流系统1也称为搬运系统。
[0053]
物流系统1具备:第1物流机构10,具有搬运所销售的物品的如图1所示的第1搬运
机11、及设置在收件地且储存被搬运来的物品的寄存柜装置12;以及终端装置19,由购买者携带。在本实施例中,为了简化说明,按购买者与收件人为同一人进行说明,但并不限定于此,购买者与收件人也可为不同的人。
[0054]
另外,物流系统1还具备第2物流机构20,该第2物流机构20具有:第2搬运机21,例如从将物品自工厂搬运过来的搬运商揽收物品,并搬运所揽收的物品;及保管库22,保管由第2搬运机21搬运过来的物品。第2物流机构20的第2搬运机21在物品被销售之后,将所销售的物品从保管库22搬运至第1物流机构10的第1搬运机11,将被搬运过来的物品递交至第1搬运机11。
[0055]
进而,物流系统1具备信息处理装置100,该信息处理装置100对第1物流机构10的第1搬运机11、及第2物流机构20的第2搬运机21进行控制使它们将所销售的物品从保管库22配送至收件地。使用这种构成,在物流系统1中,执行与所销售的物品的配送相关的下述9个步序。
[0056]
第1个步序是第2搬运机21从搬运商揽收物品的揽收步序,第2个步序是第2搬运机21将所揽收的物品搬运至保管库22的步序(以下,称为向保管库搬运的搬运步序),第3个步序是第2搬运机21将被搬运来的物品储存至保管库22的步序(以下,称为向保管库储存的储存步序)。第1个至第3个步序是对被销售之前的物品进行的步序,因此称为前段步序。
[0057]
第4个步序是第2搬运机21将所销售的物品从保管库22取出的取出步序,第5个步序是第2搬运机21将取出的物品搬运至第1搬运机11的步序(以下,称为向第1搬运机搬运的搬运步序)。第6个步序是第2搬运机21将被搬运来的物品递交至第1搬运机11的递交步序。第7个步序是第1搬运机11将被递交来的物品搬运至设置在该物品的收件地的寄存柜装置12的步序(以下,称为向寄存柜装置搬运的搬运步序),第8个步序是第1搬运机11将被搬运来的物品储存至寄存柜装置12的步序(以下,称为向寄存柜装置储存的储存步序)。第9个步序是信息处理装置100向收件人所携带的终端装置19发送告知物品已配送至收件地的寄存柜装置12的通知的步序(以下,称为通知步序)。第4个至第9个步序是对已被销售的物品进行的步序,且是在前段步序之后执行的,因此称为后段步序。
[0058]
信息处理装置100管理人接触该物品的最后时刻,该时刻是比收件人收取所配送的物品的收取时刻早的时刻(以下,称为第1时刻)。信息处理装置100管理第1时刻是为了,由人排出而附着在物品上的病毒及细菌的感染力大小会随着时间的经过而变小,因此基于第1时刻,通知建议开始收取该物品的建议收取开始时刻。
[0059]
在本实施例中,时刻是以日、时及分表示来进行说明,但并不限定于此。时刻也可由日、时、分及秒表示,或可由日及时表示,还可仅由日表示。另外,时刻也可由时、分及秒表示,或可由时及分表示,还可仅由时表示。
[0060]
另外,在本实施例中,所谓人接触物品是指,人物理性地接触物品。所谓人物理性地接触物品,不仅包括人的身体物理性地接触物品,还包括例如手套、工作服等穿在人身上的衣服物理性地接触物品。
[0061]
另外,信息处理装置100还管理人接触第2物流机构20所搬运或保管的该物品的最后时刻,该时刻是比从第2物流机构20向第1物流机构10的第1搬运机11递交物品的递交时刻早的时刻(以下,称为第2时刻)。信息处理装置100管理第2时刻是为了,能基于第2时刻来设定初始的第1时刻。
[0062]
执行第1个步序的第2搬运机21是如图2所示的无人地面车辆,配置在禁止入内的经销商的仓库。因此,第2搬运机21上无人乘坐。
[0063]
第2搬运机21具备:底盘213,具有包含车轮211及212的多个车轮;储存库214,设置在底盘213的上面;及控制装置219,内置在储存库214中。
[0064]
第2搬运机21的储存库214具备1个储存箱215。储存箱215具备箱体,该箱体具有未图示的1片底板、顶板及背板、以及2片侧板,形成被这些板封闭但前方开放的空间。在箱体的开口部设置有将门215a镶住的门框215b。门215a具备作为门闩的死螺栓215c,门框215b具备作为死螺栓215c的支撑座的闩销215d。
[0065]
第2搬运机21所具备的储存库214的门215a还具备未图示的马达,该马达按照从控制装置219输出的信号,将死螺栓215c插入至闩销215d,由此将门215a上锁。该马达按照从控制装置219输出的信号,将死螺栓215c从闩销215d拔出,由此将门215a解锁。
[0066]
第2搬运机21还具备设置在底盘213的前面的lidar(light detection and ranging,光达)传感器216、及设置在底盘213的后面的未图示的lidar传感器。
[0067]
第2搬运机21所具备的前面的lidar传感器216在使用第2搬运机21的前方向作为基准方位的情况下,向与该基准方位形成的方位角包含在-90度至+90度的范围内,且与第2搬运机21的前方向形成的仰角包含在-90度至+90度的范围内的多个方向照射激光。前面的lidar传感器216接收被照射的激光的反射光,基于从照射激光起至接收反射光为止的时间,计测与反射激光的多个反射点相距的距离。接着,前面的lidar传感器216基于激光的照射方向与计测所得的距离,针对多个反射点算出使用第2搬运机21的中心点作为原点的第2搬运机21在三维坐标系中的坐标值。之后,前面的lidar传感器216将算出的多个反射点的坐标值输出至控制装置219。
[0068]
第2搬运机21所具备的后面的lidar传感器在使用第2搬运机21的后方向作为基准方位的情况下,向与该基准方位形成的方位角包含在-90度至+90度的范围内,且与第2搬运机21的后方向形成的仰角包含在-90度至+90度的范围内的多个方向照射红外线的激光。另外,后面的lidar传感器针对被照射的激光的多个反射点算出第2搬运机21在三维坐标系中的坐标值,并将算出的多个反射点的坐标值输出至控制装置219。
[0069]
第2搬运机21所具备的前面的lidar传感器216及后面的lidar传感器将多个反射点的坐标值输出至控制装置219是为了,特定出使用第2搬运机21作为基准的所有方向上的物体在三维空间的坐标值及尺寸等,以便控制装置219例如避开障碍物等物体而行驶。
[0070]
第2搬运机21还具备拍摄装置217,该拍摄装置217设置在储存库214的前面,光轴及视角经过调整以能拍摄第2搬运机21的前方。拍摄装置217为数字式非立体相机,例如以1秒1次的预定周期拍摄第2搬运机21的前方,并将表示通过拍摄而获得的图像的图像信号输出至控制装置219。
[0071]
另外,第2搬运机21还具备设置在储存库214的上面的机械臂218。机械臂218为垂直多关节机器人,具备:驱动电路,按照从控制装置219输出的控制信号,驱动未图示的马达;及两爪式夹钳218a,通过马达而平行开闭。
[0072]
第2搬运机21的机械臂218具备:拍摄装置218b,搭载于夹钳218a,光轴及视角经过调整以使夹钳218a的爪尖包含在拍摄范围内;多个关节结构,能通过未图示的马达而活动;及多个臂218c,能以关节结构为中心而活动。夹钳218a并不限定于两爪式,也可具有三根以
上爪子,还可具有多根指头来取代两根爪子。
[0073]
第2搬运机21的机械臂218所具备的拍摄装置218b为数字式立体相机,根据从控制装置219输出的信号进行拍摄,将表示相互间具有视差的2个图像的信号输出至控制装置219。将这种信号输出至控制装置219是为了,让控制装置219基于2个图像所具有的视差,特定出作为夹钳218a的抓持对象物的物品在三维空间的位置坐标及尺寸等。
[0074]
第2搬运机21的控制装置219具备如图3所示的硬件。控制装置219的硬件包含cpu(central processing unit,中央处理器)219a、ram(random access memory,随机存取存储器)219b、rom(read only memory,只读存储器)219c、闪速存储器219d、数据通信电路219e、视频卡219f、显示装置219g、输入装置219h、位置计测电路219i、输入输出端219j及驱动电路219k。在本实施例中,第2搬运机21具备1个cpu219a,但也可具备多个cpu。另外,第2搬运机21也可具备多个ram及闪速存储器。
[0075]
第2搬运机21的cpu219a通过执行rom219c或闪速存储器219d中保存的程序,而进行第2搬运机21的整体控制。ram219b在cpu219a执行程序时,临时存储作为处理对象的数据。
[0076]
第2搬运机21的rom219c及闪速存储器219d存储有各种程序。另外,闪速存储器219d还存储有用于程序执行的各种数据、及保存有数据的表。第2搬运机21也可具备硬盘来取代闪速存储器219d。
[0077]
第2搬运机21的数据通信电路219e例如为nic(network interface card,网络接口卡),按照tcp(transmission control protocol,传输控制协议)/ip(internet protocol,互联网协议)等通信标准,使用连接于局域网络ln的未图示的接入点及电波进行数据通信。如此,第2搬运机21的数据通信电路219e与连接于局域网络ln的保管库22及信息处理装置100进行数据通信。
[0078]
第2搬运机21的视频卡219f基于从cpu219a输出的数字信号渲染图像,并且输出表示所绘制出的图像的图像信号。显示装置219g为el(electroluminescence,电致发光)显示器,按照从视频卡219f输出的图像信号显示图像。第2搬运机21也可具备pdp(plasma display panel,等离子显示面板)或lcd(liquid crystal display,液晶显示器)来取代el显示器。输入装置219h为键盘、鼠标、触控板及按钮中任一个元件以上,按照搬运商的工作人员所进行的操作输出信号。
[0079]
第2搬运机21的位置计测电路219i为qzss(quasi-zenith satellite system,准天顶卫星系统)电路。位置计测电路219i接收从准天顶卫星发来的信号,基于接收到的信号,计测表示第2搬运机21的位置的纬度、经度及高度,并输出表示计测所得的纬度、经度及高度的信号。位置计测电路219i也可并非qzss电路而为gps(global positioning system,全球定位系统)电路,该gps电路接收从gps卫星发来的gps信号,基于接收到的gps信号,计测表示第2搬运机21的位置的纬度、经度及高度。
[0080]
第2搬运机21的输入输出端219j经由未图示的线缆,连接于与前面的lidar传感器216及后面的lidar传感器分别连接的未图示的线缆。输入输出端219j将前面的lidar传感器216及后面的lidar传感器分别输出的表示坐标值的信号输入至cpu219a。
[0081]
另外,第2搬运机21的输入输出端219j经由未图示的线缆,连接于设置在储存库214的前面的拍摄装置217、及机械臂218所具备的拍摄装置218b,将拍摄装置217及218b所
输出的图像信号输入至cpu219a。
[0082]
进而,第2搬运机21的输入输出端219j经由未图示的线缆连接于机械臂218,将cpu219a所输出的控制信号输入至机械臂218。
[0083]
驱动电路219k连接于与使多个车轮旋转的未图示的马达分别连接的未图示的线缆。驱动电路219k通过按照cpu219a所输出的控制信号驱动该马达,而使多个车轮旋转。
[0084]
驱动电路219k连接于与使门215a所具备的死螺栓215c从闩销215d拔出或插入至闩销215d的未图示的马达连接的线缆,按照cpu219a所输出的信号驱动该马达。
[0085]
搬运商的工作人员到达经销商的仓库之后,操作未图示的终端装置,终端装置按照该操作,向信息处理装置100发送告知已到达营业所的通知。信息处理装置100接收到该通知之后,向第2搬运机21发送命令执行从搬运商揽收物品的揽收步序的执行命令。
[0086]
第2搬运机21的数据通信电路219e接收到该执行命令之后,cpu219a为了按照该执行命令进行揽收步序,而执行如图4所示的揽收处理。
[0087]
开始执行揽收处理之后,第2搬运机21的cpu219a从闪速存储器219d,获取以纬度、经度及高度表示预定揽收地点的位置的信息(步骤s01)。在本实施例中,揽收地点为仓库的搬入口,但并不限定于此。
[0088]
接着,第2搬运机21的cpu219a基于从位置计测电路219i输出的信号,特定出第2搬运机21的纬度、经度及高度。之后,第2搬运机21的cpu219a例如从闪速存储器219d读出未图示的部分路径表,并从读出的部分路径表中读出多条记录,该部分路径表预先保存有与仓库内的通路等可供第2搬运机21移动的部分路径相关的信息。部分路径表的各记录中,预先配对保存有部分路径的起始节点的纬度、经度及高度、该部分路径的终止节点的纬度、经度及高度、以及作为该部分路径的边缘的长度。
[0089]
第2搬运机21的cpu219a使用特定出的第2搬运机21的纬度、经度及高度、读入的多条记录中分别保存的作为部分路径的边缘的长度、以及节点的纬度、经度及高度、揽收地点的纬度、经度及高度,例如执行戴克斯特拉算法等路径探索算法。由此,cpu219a算出第2搬运机21的位置至揽收地点的最短总路径,并将算出的总路径决定为移动路径(步骤s02)。
[0090]
接着,第2搬运机21的cpu219a为了沿着移动路径顺行,而基于从位置计测电路219i输出的信号,特定出第2搬运机21的纬度、经度及高度。之后,cpu219a生成控制信号,该控制信号是用来缩小特定出的纬度、经度及高度与移动路径中包含的多个未到达节点中依序最早到达的节点的纬度、经度及高度之间的不同而行驶。之后,cpu219a将生成的控制信号输出至驱动电路219k(步骤s03),驱动电路219k按照控制信号使多个车轮旋转。
[0091]
之后,第2搬运机21的cpu219a若由于并未到达移动路径中包含的1个或多个节点的全部,所以判别为未到达揽收地点(步骤s04;否),则从步骤s03开始重复所述处理。与此相对地,cpu219a若由于已到达移动路径中包含的1个或多个节点的全部,所以判别为已到达揽收地点(步骤s04;是),则向驱动电路219k输出用来将储存库214的门215a解锁的控制信号,由此将死螺栓215c从闩销215d拔出(步骤s05)。
[0092]
之后,搬运商的工作人员将物品手持移动至第2搬运机21的前方。第2搬运机21的拍摄装置217拍摄由工作人员保持的物品,输入输出端219j输入表示通过拍摄而获得的图像的图像信号之后,第2搬运机21的cpu219a例如进行图案匹配。由此,cpu219a从以图像信号表示的图像中检测与被拍摄的物品对应的图像区域。在图案匹配中,cpu219a使用表示闪
速存储器219d中预先存储的物品的图案的信息。接着,cpu219a对检测到的图像区域,例如执行ocr(optical character recognition,光学字符识别)处理,由此获取印刷在物品或物品的包装上的物品id(identification)(步骤s06)。
[0093]
在本实施例中,识别物品的物品id是该物品的物品编号与由该物品的制造商或经销商对该物品分配的例如序列号也就是个体识别编号的组合,但并不限定于此。
[0094]
接着,搬运商的工作人员用手将物品放入至第2搬运机21的储存库214中,然后对输入装置219h进行使其将储存库214的门215a上锁的操作。第2搬运机21的输入装置219h输出与该操作对应的信号之后,cpu219a向驱动电路219k输出用来使储存库214的门215a上锁的控制信号,由此将死螺栓215c插入至闩销215d(步骤s07)。
[0095]
之后,第2搬运机21的cpu219a生成完成报告,该完成报告包含获取到的物品id、及识别揽收以该物品id识别的物品的揽收步序的步序id,用来告知揽收步序已完成。接着,第2搬运机21的cpu219a将信息处理装置100作为收件地,向数据通信电路219e输出生成的完成报告(步骤s08)。第2搬运机21的cpu219a在数据通信电路219e向信息处理装置100发送完成报告之后,结束揽收处理的执行。
[0096]
如此,在本实施例中,为了进行揽收步序,搬运商的工作人员需要用手将物品储存至第2搬运机21,因此揽收步序中有人介入。在本说明书中,所谓步序中有人介入是指,为了进行该步序,需要人物理性地接触物品。
[0097]
因此,信息处理装置100接收、获取告知揽收步序已完成的完成报告之后,将获取完成报告的时刻作为第2时刻加以管理。之后,信息处理装置100为了将揽收的物品搬运至保管库22,而向第2搬运机21发送命令执行向保管库搬运的搬运步序的执行命令。
[0098]
第2搬运机21的数据通信电路219e接收到该执行命令之后,cpu219a为了按照该执行命令进行向保管库搬运的搬运步序,而执行如图5所示的保管库搬运处理。
[0099]
开始执行保管库搬运处理之后,第2搬运机21的cpu219a从闪速存储器219d获取以纬度、经度及高度表示保管库22的位置的信息(步骤s11)。接着,cpu219a执行与图4的步骤s02至s04相同的处理(步骤s12至s14),由此将物品搬运至保管库22。之后,cpu219a将信息处理装置100作为收件地,向数据通信电路219e输出完成报告,该完成报告包含向保管库搬运的搬运步序的步序id,用来告知该步序已完成(步骤s15)。第2搬运机21的cpu219a在数据通信电路219e向信息处理装置100发送完成报告之后,结束保管库搬运处理的执行。
[0100]
如此,在本实施例中,作为无人地面车辆的第2搬运机21进行向保管库搬运的搬运步序的全部,所以该步序中无人介入。因此,信息处理装置100即便接收到告知向保管库搬运的搬运步序已完成的完成报告,也不更新第2时刻,而是予以维持。
[0101]
保管库22具备用于物品储存的如图6所示的多个储存箱225、及控制多个储存箱225各自的上锁及解锁的控制装置229。
[0102]
保管库22所具备的多个储存箱225分别具备未图示的箱体及门、以及设置在箱体的开口部的门框。另外,各个门具备作为门闩的未图示的死螺栓,各个门框具备作为死螺栓的支撑座的未图示的闩销。多个储存箱225分别所具备的箱体、门、门框、死螺栓及闩销的构成及功能与第2搬运机21所具备的储存箱215的箱体、门215a、门框215b、死螺栓215c及闩销215d的构成及功能相同。
[0103]
保管库22所具备的控制装置229具备未图示的cpu、ram、rom、闪速存储器、数据通
信电路、视频卡、显示装置、输入装置、输入输出端及驱动电路这些硬件。保管库22的控制装置229所具备的这些硬件的构成及功能与第2搬运机21的控制装置219所具备的硬件的构成及功能相同。在本实施例中,保管库22具备1个cpu,但也可具备多个cpu。另外,保管库22也可具备多个ram及闪速存储器。
[0104]
从已将物品搬运至保管库22的第2搬运机21接收到告知向保管库搬运的搬运步序已完成的完成报告之后,信息处理装置100向第2搬运机21发送命令执行向保管库储存的储存步序的执行命令。
[0105]
第2搬运机21的数据通信电路219e接收到该执行命令之后,cpu219a为了按照该执行命令进行向保管库储存的储存步序,而执行如图7所示的保管库储存处理。
[0106]
开始执行保管库储存处理之后,第2搬运机21的cpu219a基于第2搬运机21的纬度、经度及高度、以及保管库22的纬度、经度及高度,生成使机械臂218所具备的拍摄装置218b的光轴变更,以能拍摄保管库22所具备的多个储存箱225中的1个储存箱225的控制信号。接着,cpu219a将生成的控制信号、及命令拍摄的控制信号经由输入输出端219j输出至拍摄装置218b。
[0107]
接着,cpu219a基于从拍摄装置218b输出的信号获取2张图像,并对获取到的2张图像中的1张图像,例如执行ocr处理。由此,cpu219a获取储存箱id,该储存箱id是被拍摄的储存箱225的门上显示的编号,用来识别该储存箱225(步骤s21)。
[0108]
接着,第2搬运机21的cpu219a基于获取到的2张图像的视差,算出表示被拍摄的门的位置及形状的坐标值。在本实施例中,cpu219a所算出的坐标值是使用第2搬运机21的中心点作为原点的三维坐标系的坐标值,但并不限定于此。
[0109]
之后,第2搬运机21的cpu219a基于算出的坐标值,向机械臂218输出使机械臂218打开被拍摄的门的控制信号。机械臂218按照该控制信号,打开保管库22的门。
[0110]
接着,第2搬运机21的cpu219a向驱动电路219k输出用来将第2搬运机21所具备的储存库214的门215a解锁的控制信号(步骤s22)。
[0111]
之后,第2搬运机21的cpu219a从闪速存储器219d,获取表示第2搬运机21的储存库214所具备的门215a的位置及形状的坐标值。之后,cpu219a基于获取到的坐标值,向机械臂218输出使机械臂218将门215a打开的控制信号。机械臂218按照控制信号,将第2搬运机21的门215a打开。
[0112]
之后,第2搬运机21的cpu219a基于从闪速存储器219d获取到的坐标值,生成使机械臂218所具备的拍摄装置218b的光轴变更,以能拍摄第2搬运机21所具备的储存库214的箱体的开口部与内部的控制信号。接着,cpu219a将生成的控制信号、及命令拍摄的控制信号输出至机械臂218。之后,cpu219a基于从拍摄装置218b输出的信号获取2张图像,并基于获取到的2张图像的视差,算出表示储存库214的箱体中储存的物品的位置及形状的坐标值。接着,cpu219a基于算出的坐标值,向机械臂218输出抓持储存库214中储存的物品,将该物品从储存库214取出的控制信号(步骤s23)。机械臂218按照控制信号,抓持储存库214中储存的物品,将其从储存库214取出。
[0113]
之后,第2搬运机21的cpu219a基于表示被打开之前的保管库22的门的位置的坐标值,生成使机械臂218所具备的拍摄装置218b的光轴变更,以能拍摄门被打开之后的储存箱215的开口部与内部的控制信号。接着,cpu219a将生成的控制信号、及命令拍摄的控制信号
输出至机械臂218。之后,cpu219a基于由从拍摄装置218b输出的信号表示的2张图像的视差,算出表示箱体的开口部的位置及形状的坐标值、以及箱体的纵深。接着,cpu219a基于算出的坐标值及纵深,向机械臂218输出将从第2搬运机21取出的物品由开口部放入至保管库22的储存箱225的控制信号(步骤s24)。机械臂218按照该控制信号,将物品储存至保管库22。
[0114]
之后,第2搬运机21的cpu219a向机械臂218输出将被机械臂218打开的第2搬运机21的门225a、及保管库22的门关闭的控制信号。
[0115]
之后,第2搬运机21的cpu219a生成完成报告,该完成报告包含识别储存有物品的保管库22的储存箱225的储存箱id、及向保管库储存的储存步序的步序id,用来告知向保管库储存的储存步序已完成。接着,第2搬运机21的cpu219a将信息处理装置100作为收件地,向数据通信电路219e输出生成的完成报告(步骤s25)。第2搬运机21的cpu219a在数据通信电路219e向信息处理装置100发送完成报告之后,结束保管库储存处理的执行。
[0116]
如此,在本实施例中,第2搬运机21进行向保管库储存的储存步序的全部,所以该步序中无人介入。因此,信息处理装置100即便接收到告知向保管库储存的储存步序已完成的完成报告,也不更新第2时刻。之后,信息处理装置100向保管库22发送上锁命令,该上锁命令包含该完成报告中包含的储存箱id,用来命令将以该储存箱id识别的储存箱225的上锁。
[0117]
保管库22的未图示的数据通信电路接收到上锁命令之后,保管库22的cpu获取上锁命令中包含的储存箱id,并向驱动电路输出用来将以获取到的储存箱id识别的储存箱225上锁的控制信号。由此,将该储存箱225上锁。
[0118]
由购买者携带的终端装置19例如为智能手机,具备如图8所示的cpu191、ram192、rom193a、闪速存储器193b、数据通信电路194a、声音通信电路194b、视频卡195a、显示装置195b、输入装置195c、位置计测电路196、扬声器199a及麦克风199b。在本实施例中,终端装置19具备1个cpu191,但也可具备多个cpu。另外,终端装置19也可具备多个ram及闪速存储器。
[0119]
终端装置19的cpu191、ram192、rom193a、闪速存储器193b、数据通信电路194a、视频卡195a、显示装置195b、输入装置195c及位置计测电路196的构成及功能与图3所示的第2搬运机21所具备的控制装置219的cpu219a、ram219b、rom219c、闪速存储器219d、数据通信电路219e、视频卡219f、显示装置219g、输入装置219h及位置计测电路219i的构成及功能相同。
[0120]
终端装置19的声音通信电路194b使用未图示的基站及电波进行声音通信。扬声器199a按照cpu191所输出的信号输出声音,麦克风199b输出表示终端装置19周围的声音的信号。
[0121]
购买者操作终端装置19的输入装置195c来购买物品。终端装置19的输入装置195c输出与该操作对应的信号之后,cpu191基于该信号,获取请求购买的物品的物品编号、及表示由购买者指定的收件地址的信息。接着,cpu191生成销售请求,该销售请求包含物品编号与表示收件地址的信息,用来请求销售被分配了该物品编号的物品,并将所销售的物品搬运至收件地。之后,终端装置19的cpu191将信息处理装置100作为收件地,向数据通信电路194a输出生成的销售请求。
[0122]
信息处理装置100从终端装置19的数据通信电路194a接收到销售请求之后,从保管库22中储存的1个或多个物品中,选择1个被分配了销售请求中包含的物品编号的物品,并将所选择的物品销售给购买者。接着,信息处理装置100向第2搬运机21发送执行命令,该执行命令包含识别储存有所销售的物品的保管库22的储存箱225的储存箱id,用来命令执行取出步序。
[0123]
第2搬运机21的数据通信电路219e接收到该执行命令之后,cpu219a为了按照该执行命令进行取出步序,而执行如图9所示的取出处理。
[0124]
开始执行取出处理之后,第2搬运机21的cpu219a执行与图5的步骤s11至s14相同的处理(步骤s31至s34)。由此,第2搬运机21移动至保管库22。
[0125]
之后,第2搬运机21的cpu219a将信息处理装置100作为收件地,向数据通信电路219e输出告知已到达保管库22的到达报告(步骤s35)。
[0126]
信息处理装置100接收了到达报告之后,向保管库22发送解锁命令,该解锁命令包含储存有所销售的物品的储存箱225的储存箱id,用来命令将该储存箱225解锁。保管库22的未图示的数据通信电路接收到解锁命令之后,保管库22的cpu向驱动电路输出用来将以解锁命令中包含的储存箱id识别的储存箱225解锁的控制信号。
[0127]
在步骤s35中输出到达报告之后,第2搬运机21的cpu219a从数据通信电路219e所接收到的执行命令获取储存箱id(步骤s36)。
[0128]
之后,第2搬运机21的cpu219a生成使机械臂218所具备的拍摄装置218b的光轴变更,以能拍摄保管库22所具备的多个储存箱225中的1个储存箱225的控制信号。接着,cpu219a执行将生成的控制信号、及命令拍摄的控制信号输出至拍摄装置218b的处理。之后,cpu219a基于从拍摄装置218b输出的信号获取2张图像,并从获取到的2张图像中的1张图像获取被拍摄的储存箱225的门上显示的储存箱id。
[0129]
接着,第2搬运机21的cpu219a对从执行命令获取到的储存箱id与从图像获取到的储存箱id是否一致进行判别。这时,cpu219a若判别为2个储存箱id不一致,则生成使拍摄装置218b的光轴变更,以能拍摄多个储存箱225中尚未被拍摄的1个储存箱的控制信号。之后,cpu219a从将生成的控制信号、及命令拍摄的控制信号输出至拍摄装置218b的处理开始重复所述处理。
[0130]
与此相对低,第2搬运机21的cpu219a若判别为2个储存箱id一致,则基于获取到的2张图像的视差,向机械臂218输出将被拍摄的保管库22的门打开的控制信号。
[0131]
接着,第2搬运机21的cpu219a向驱动电路219k输出将第2搬运机21所具备的储存库214的门215a解锁的控制信号(步骤s37)。之后,第2搬运机21的cpu219a向机械臂218输出将第2搬运机21的门215a打开的控制信号。
[0132]
接着,第2搬运机21的cpu219a基于表示被打开之前的保管库22的门的位置的坐标值,输出使机械臂218所具备的拍摄装置218b的光轴变更,以能拍摄门被打开之后的储存箱225的开口部与内部的控制信号、及命令拍摄的控制信号。接着,cpu219a基于由从拍摄装置218b输出的信号表示的2张图像的视差,输出抓持保管库22的储存箱225中储存的物品,将其从储存箱225取出的控制信号(步骤s38)。机械臂218按照输出的控制信号,抓持储存箱225中储存的物品,将其从储存箱225取出。
[0133]
接着,第2搬运机21的cpu219a从闪速存储器219d,获取表示第2搬运机21的储存库
214所具备的箱体的开口部的位置及形状的坐标值、以及箱体的纵深。接着,cpu219a基于获取到的坐标值及纵深,输出将从保管库22取出的物品由开口部放入至第2搬运机21的储存库214的控制信号(步骤s39)。机械臂218按照输出的控制信号,将物品储存至第2搬运机21。
[0134]
之后,第2搬运机21的cpu219a向机械臂218输出将被机械臂218打开的第2搬运机21的门225a、及保管库22的门关闭的控制信号。之后,第2搬运机21的cpu219a向驱动电路219k输出将第2搬运机21所具备的储存库214的门215a上锁的控制信号(步骤s40)。
[0135]
接着,第2搬运机21的cpu219a将信息处理装置100作为收件地,向数据通信电路219e输出完成报告,该完成报告包含取出步序的步序id,用来告知该步序已完成(步骤s41),然后结束取出处理的执行。
[0136]
如此,在本实施例中,第2搬运机21进行了取出步序的全部,所以该步序中无人介入。因此,信息处理装置100即便接收到告知取出步序已完成的完成报告,也不更新第2时刻。
[0137]
之后,信息处理装置100向第1搬运机11发送移动命令,该移动命令是命令其向作为将物品从第2搬运机21递交至第1搬运机11的地点而预先设定的递交地点移动。另外,信息处理装置100向第2搬运机21发送命令执行向第1搬运机搬运的搬运步序的执行命令。在本实施例中,递交地点为仓库的搬出口,但并不限定于此。
[0138]
第1搬运机11具备未图示的多个车轮、包含多个车轮的底盘、设置在底盘的上面的储存库、分别设置在底盘的前面及后面的lidar传感器、设置在底盘的前面的拍摄装置、设置在储存库的上面的机械臂、及内置在储存库中的控制装置。第1搬运机11的多个车轮、底盘、储存库、前面的lidar传感器、后面的lidar传感器、拍摄装置、机械臂及控制装置的构成及功能与第2搬运机21的多个车轮、底盘213、储存库214、前面的lidar传感器216、未图示的后面的lidar传感器、拍摄装置217、机械臂218及控制装置219的构成及功能相同。
[0139]
另外,第1搬运机11的控制装置具备未图示的cpu、ram、rom、闪速存储器、数据通信电路、视频卡、显示装置、输入装置、位置计测电路、输入输出端及驱动电路这些硬件。第1搬运机11的控制装置所具备的硬件的构成及功能与图3所示的第2搬运机21的控制装置219所具备的硬件的构成及功能相同。在本实施例中,第1搬运机11具备1个cpu,但也可具备多个cpu。另外,第1搬运机11也可具备多个ram及闪速存储器。
[0140]
第1搬运机11的数据通信电路接收到移动命令之后,第1搬运机11的cpu从闪速存储器获取表示递交地点的纬度、经度及高度的信息。接着,第1搬运机11的cpu执行与图4的步骤s02至s04相同的处理,由此移动至递交地点。
[0141]
第2搬运机21的数据通信电路219e接收到命令执行向第1搬运机搬运的搬运步序的执行命令之后,第2搬运机21的cpu219a执行未图示的第1搬运机搬运处理。
[0142]
开始第1搬运机搬运处理之后,第2搬运机21的cpu219a从闪速存储器219d,获取表示递交地点的纬度、经度及高度的信息。接着,cpu219a执行与图4的步骤s02至s04相同的处理,由此将物品搬运至递交地点。之后,cpu219a将信息处理装置100作为收件地,向数据通信电路219e输出完成报告,该完成报告包含向第1搬运机搬运的搬运步序的步序id,用来告知该步序已完成,然后结束第1搬运机搬运处理的执行。
[0143]
如此,在本实施例中,第2搬运机21进行向第1搬运机搬运的搬运步序的全部,所以该步序中无人介入。因此,信息处理装置100即便接收到告知向第1搬运机搬运的搬运步序
已完成的完成报告,也不更新第2时刻。之后,信息处理装置100向第2搬运机21发送命令执行将物品从第2搬运机21递交至第1搬运机11的递交步序的执行命令。
[0144]
第2搬运机21的数据通信电路219e接收到该执行命令之后,cpu219a为了按照该执行命令进行递交步序,而执行如图10所示的递交处理。
[0145]
开始执行递交处理之后,第2搬运机21的cpu219a向驱动电路219k输出将第2搬运机21所具备的储存库214的门215a解锁的控制信号(步骤s51)。
[0146]
接着,第2搬运机21的cpu219a向机械臂218输出将第2搬运机21所具备的储存库214的门215a、及第1搬运机11所具备的储存库的门打开的控制信号。之后,第2搬运机21的cpu219a执行与图7的步骤s23相同的处理,由此向机械臂218输出将第2搬运机21的储存库214中储存的物品取出的控制信号(步骤s52)。
[0147]
之后,执行与图7的步骤s24相同的处理,由此向机械臂218输出将从第2搬运机21取出的物品储存至第1搬运机11的储存库的控制信号(步骤s53)。机械臂218按照该控制信号,将物品储存至第1搬运机11的储存库。
[0148]
接着,第2搬运机21的cpu219a向机械臂218输出将已被机械臂218打开的第2搬运机21的门225a及第1搬运机11的门关闭的控制信号。
[0149]
之后,第2搬运机21的cpu219a将信息处理装置100作为收件地,向数据通信电路219e输出完成报告,该完成报告包含递交步序的步序id,用来告知该步序已完成(步骤s25),然后结束递交处理的执行。
[0150]
如此,在本实施例中,第2搬运机21进行递交步序的全部,所以该步序中无人介入。因此,信息处理装置100接收到告知递交步序已完成的完成报告之后,将第2时刻作为第1时刻加以管理。
[0151]
接着,信息处理装置100向第1搬运机11发送命令将第1搬运机11的储存库上锁的上锁命令。第1搬运机11的数据通信电路接收到上锁命令之后,第1搬运机11的cpu向驱动电路输出将第1搬运机11的储存库上锁的控制信号。
[0152]
之后,信息处理装置100向第1搬运机11发送执行命令,该执行命令包含表示所销售的物品的收件地址的信息,用来命令执行向寄存柜装置搬运的搬运步序。
[0153]
第1搬运机11的数据通信电路接收到该执行命令之后,第1搬运机11的cpu执行未图示的寄存柜装置搬运处理。
[0154]
开始寄存柜装置搬运处理之后,第1搬运机11的cpu从数据通信电路获取执行命令,并从获取到的执行命令获取表示收件地址的信息。接着,第1搬运机11的cpu获取与表示收件地址的信息预先配对存储在闪速存储器中的表示纬度、经度及高度的信息。
[0155]
接着,第1搬运机11的cpu使用获取到的信息,执行与图4的步骤s02至s04相同的处理,由此将物品搬运至物品的收件地。之后,第1搬运机11的cpu将信息处理装置100作为收件地,向数据通信电路219e输出完成报告,该完成报告包含向寄存柜装置搬运的搬运步序的步序id,用来告知该步序已完成;然后结束寄存柜装置搬运处理的执行。
[0156]
如此,在本实施例中,第1搬运机11进行向寄存柜装置搬运的搬运步序的全部,所以该步序中无人介入。因此,信息处理装置100即便接收到告知向寄存柜装置搬运的搬运步序已完成的完成报告,也不更新第1时刻。
[0157]
寄存柜装置12是设置在收件人所居住的高级公寓的入口的快递箱。寄存柜装置12
具备未图示的多个储存箱、及控制多个储存箱各自的上锁及解锁的控制装置。寄存柜装置12所具备的多个储存箱及控制装置的构成及功能与保管库22所具备的多个储存箱225及控制装置229的构成及功能相同。
[0158]
寄存柜装置12所具备的多个储存箱分别具有未图示的箱体、门、门框、死螺栓及闩销。寄存柜装置12所具备的箱体、门、门框、死螺栓及闩销的构成及功能与保管库22所具备的多个储存箱225分别具有的未图示的箱体、门、门框、死螺栓及闩销的构成及功能相同。
[0159]
寄存柜装置12所具备的控制装置具有未图示的cpu、ram、rom、闪速存储器、数据通信电路、视频卡、显示装置、输入装置、输入输出端及驱动电路这些硬件。寄存柜装置12的控制装置所具备的这些硬件的构成及功能与保管库22的控制装置229所具备的硬件的构成及功能相同。在本实施例中,寄存柜装置12具备1个cpu,但也可具备多个cpu。另外,寄存柜装置12也可具备多个ram及闪速存储器。
[0160]
从已将物品搬运至寄存柜装置12的第1搬运机11,接收到告知向寄存柜装置搬运的搬运步序已完成的完成报告之后,信息处理装置100向第1搬运机11发送命令执行向寄存柜装置储存的储存步序的执行命令。
[0161]
第1搬运机11的数据通信电路接收到该执行命令之后,第1搬运机11的cpu为了按照该执行命令进行向寄存柜装置储存的储存步序,而执行未图示的寄存柜装置储存处理。
[0162]
开始执行寄存柜装置储存处理之后,第1搬运机11的cpu执行与图7的步骤s21至s24相同的处理。由此,第1搬运机11使用机械臂,从第1搬运机11的储存库取出物品,并将取出的物品储存至寄存柜装置12所具备的多个储存箱中的1个储存箱,由此将该物品从第1搬运机11移动至寄存柜装置12。
[0163]
之后,第1搬运机11的cpu生成完成报告,该完成报告包含识别储存有物品的寄存柜装置12的储存箱的储存箱id、及向寄存柜装置储存的储存步序的步序id,用来告知该步序已完成。接着,第1搬运机11的cpu将信息处理装置100作为收件地,向数据通信电路219e输出生成的完成报告。第1搬运机11的cpu在数据通信电路向信息处理装置100发送完成报告之后,结束寄存柜装置储存处理的执行。之后,第1搬运机11的cpu输出用来沿着移动路径逆行的控制信号,由此返回揽收地点。
[0164]
如此,在本实施例中,第1搬运机11进行向寄存柜装置储存的储存步序的全部,所以该步序中无人介入。因此,信息处理装置100即便接收到告知向寄存柜装置储存的储存步序已完成的完成报告,也不更新第1时刻。
[0165]
接着,信息处理装置100算出比第1时刻晚目标经过时间的时刻,作为建议开始收取的建议收取开始时刻。之后,信息处理装置100向收件人的终端装置19发送告知第1时刻、建议收取开始时刻、储存箱id及密码的通知,由此执行通知步序。
[0166]
在本实施例中,将目标经过时间预先设定为从预先设定的病毒或细菌由人体排出而附着在物品上起,至该预先设定的病毒或细菌的感染力大小达到预先设定的大小以下为止的时间。在本实施例中,所谓附着在物品上的病毒或细菌的感染力是指,该病毒或该细菌造成感染的能力,病毒或细菌造成感染的能力以物理性地接触该病毒或该细菌的人感染该病毒或该细菌的感染概率表示,但并不限定于这些。另外,在本实施例中,所谓物理性地接触病毒或细菌的人感染该病毒或该细菌是指,该病毒或该细菌在此人的体内或体表寄生并繁殖,但并不限定于此。
[0167]
终端装置19的数据通信电路219e接收到通知之后,cpu219a从数据通信电路219e获取通知,并使显示装置219g显示获取到的通知。看到该显示的收件人在建议收取开始时刻以后,移动而到达寄存柜装置12,对寄存柜装置12所具备的输入装置进行输入储存箱id与密码的操作。
[0168]
寄存柜装置12的输入装置输出与该操作对应的信号之后,寄存柜装置12的cpu基于该信号,获取储存箱id与表示密码的信息。接着,寄存柜装置12的cpu生成问询,该问询包含获取到的储存箱id与表示密码的信息,用来问询是否允许将以该储存箱id识别的储存箱解锁。之后,寄存柜装置12的cpu将信息处理装置100作为收件地,向寄存柜装置12的数据通信电路输出生成的问询。
[0169]
信息处理装置100接收到问询之后,对该问询中包含的储存箱id与密码的组合和发送至终端装置19的储存箱id与密码的组合是否一致进行判别。信息处理装置100若判别为所述组合一致,则回复允许解锁,若判别为所述组合不一致,则回复不允许解锁。
[0170]
寄存柜装置12的数据通信电路接收到回复之后,寄存柜装置12的cpu从数据通信电路获取接收到的回复。接着,若获取到的回复为不允许解锁的回复,则cpu使显示装置显示告知储存箱id及密码中至少一者错误的消息。看到该显示的收件人再次进行输入储存箱id与密码的操作。
[0171]
与此相对地,若获取到的回复为允许解锁的回复,则寄存柜装置12的cpu向驱动电路输出将以获取到的储存箱id识别的储存箱解锁的控制信号。收件人将已被解锁的储存箱的门打开,收取所购买的物品。
[0172]
信息处理装置100是服务器,设置在进行物品销售的经销商的仓库或营业所。信息处理装置100对第1物流机构10及第2物流机构20进行控制使它们执行第1个至第9个步序。
[0173]
信息处理装置100具备如图11所示的cpu101、ram102、rom103a、硬盘103b,第1数据通信电路104a、第2数据通信电路104b、视频卡105a、显示装置105b及输入装置105c。信息处理装置100所具备的cpu101、ram102、rom103a、视频卡105a、显示装置105b及输入装置105c的构成及功能与图3所示的第2搬运机21的cpu219a、ram219b、rom219c、视频卡219f、显示装置219g及输入装置219h的构成及功能相同。
[0174]
信息处理装置100的硬盘103b存储有用于程序执行的各种数据、及保存有数据的表。信息处理装置100也可具备闪速存储器来取代硬盘103b。
[0175]
信息处理装置100的第1数据通信电路104a例如为nic,按照lte(long term evolution,长期演进)及5g(5
th generation,)等通信标准,使用连接于因特网in的未图示的基站及电波进行数据通信。如此,信息处理装置100的第1数据通信电路104a与连接于因特网in的第1物流机构10的第1搬运机11及寄存柜装置12、以及终端装置19进行数据通信。
[0176]
信息处理装置100的第2数据通信电路104b例如为nic,按照tcp/ip等通信标准,使用连接于局域网络ln的未图示的接入点及电波进行数据通信。如此,信息处理装置100的第2数据通信电路104b与连接于局域网络ln的第2物流机构20的第2搬运机21及保管库22进行数据通信。
[0177]
信息处理装置100的第1数据通信电路104a接收到告知搬运商已到达营业所的通知之后,信息处理装置100的cpu101执行如图12所示的前段控制处理,该前段控制处理进行使第2物流机构20执行对销售之前的物品所要进行的前段步序的控制。
[0178]
由此,信息处理装置100的cpu101作为如图13所示的控制部110而发挥功能,该控制部110对第1物流机构10及第2物流机构20进行控制使它们执行配送步序。另外,cpu101作为获取部120而发挥功能,该获取部120获取识别已由第1物流机构10或第2物流机构20执行的步序的步序id。
[0179]
进而,信息处理装置100的cpu101作为管理第1时刻的管理部130而发挥功能,该第1时刻是比收件人收取物品的收取时刻早的时刻,且是人接触已进行物品配送步序的该物品的最后时刻。管理部130还管理第2时刻,该第2时刻是比从第2物流机构20向第1物流机构10递交该物品的递交时刻早的时刻,且是人接触该物品的最后时刻。
[0180]
在本实施例中,包含第1时刻及第2时刻在内的时刻的管理例如包括:将表示时刻的信息保存至作为易失性存储器的信息处理装置100的ram102、或作为非易失性存储器的信息处理装置100的硬盘103b;及读出所保存的表示时刻的信息。
[0181]
信息处理装置100的硬盘103b作为预先存储各种表的信息存储部190而发挥功能,该各种表保存有前段控制处理的执行中要使用的数据。
[0182]
信息处理装置100的信息存储部190预先存储有如图14所示的步序表,该步序表预先保存有与配送步序相关的信息。步序表中预先保存有多条记录,步序表的各记录中预先配对保存有识别步序的步序id、表示该步序的名称的信息、及表示该步序中是否有人介入的介入标记。
[0183]
在本实施例中,步序表的第1条记录中,保存有与从搬运商揽收物品的揽收步序相关的信息。因此,第1条记录中,预先配对保存有识别揽收步序的步序id“p1”、表示名称“揽收步序”的信息、及表示该揽收步序中有人介入的值为“true”的标记。在本实施例中,揽收步序中有人介入是因为,需要搬运商的工作人员用手将物品储存至第2搬运机21。
[0184]
另外,步序表的第2条记录中,预先配对保存有向保管库搬运的搬运步序的步序id“p2”、表示名称的信息、及表示向保管库搬运的搬运步序中无人介入的值为“false”的标记。在本实施例中,向保管库搬运的搬运步序中无人介入是因为,搬运物品的第2搬运机21无人自主地在地上行驶而移动至保管库22。
[0185]
另外,步序表的第3条记录中,预先配对保存有识别向保管库储存的储存步序的步序id“p3”、表示名称的信息、及表示向保管库储存的储存步序中无人介入的值为“false”的标记。在本实施例中,向保管库储存的储存步序中无人介入是因为,第2搬运机21使用机械臂218将物品储存至保管库22。
[0186]
进而,步序表的第4条记录中,预先配对保存有将所销售的物品从保管库22取出的取出步序的步序id“p4”、表示名称的信息、及表示取出步序中无人介入的值为“false”的标记。在本实施例中,取出步序中无人介入是因为,第2搬运机21使用机械臂218将物品从保管库22取出。
[0187]
另外,步序表的第5条记录中,预先配对保存有向第1搬运机搬运的搬运步序的步序id“p5”、表示名称的信息、及表示向第1搬运机搬运的搬运步序中无人介入的值为“false”的标记。
[0188]
另外,进而,步序表的第6条记录中,预先配对保存有将取出的物品从第2物流机构20递交至第1物流机构10的递交步序的步序id“p6”、表示名称的信息、及表示递交步序中无人介入的值为“false”的标记。在本实施例中,递交步序中无人介入是因为,第2物流机构20
的第2搬运机21使用机械臂218将物品递交至第1物流机构10的第1搬运机11。
[0189]
另外,步序表的第7条记录中,预先配对保存有向寄存柜装置搬运的搬运步序的步序id“p7”、表示名称的信息、及表示向寄存柜装置搬运的搬运步序中无人介入的值为“false”的标记。在本实施例中,向寄存柜装置搬运的搬运步序中无人介入是因为,搬运物品的第1搬运机11无人自主地在地上行驶而移动至寄存柜装置12。
[0190]
进而,步序表的第8条记录中,预先配对保存有向寄存柜装置储存的储存步序的步序id“p8”、表示名称的信息、及表示向寄存柜装置储存的储存步序中无人介入的值为“false”的标记。在本实施例中,向寄存柜装置储存的储存步序中无人介入是因为,第1搬运机11使用未图示的机械臂将物品储存至寄存柜装置12。
[0191]
另外,进而,步序表的第9条记录中,预先配对保存有通知步序的步序id“p9”、表示名称的信息、及表示通知步序中无人介入的值为“false”的标记。
[0192]
信息处理装置100的信息存储部190预先存储有如图15所示的第2时刻表,该第2时刻表保存有与第2时刻相关的信息。第2时刻表中,将物品的物品id与表示该物品的第2时刻的信息配对而保存有1对或多对。
[0193]
另外,信息处理装置100的信息存储部190预先存储有如图16所示的保管库表,该保管库表保存有与保管库22中储存的物品相关的信息。保管库表中,配对保存有识别保管库22的储存箱225的储存箱id、及该储存箱225中储存的物品的物品id。
[0194]
开始执行图12的前段控制处理之后,信息处理装置100的控制部110将第2搬运机21作为收件地,向第2数据通信电路104b输出命令执行从搬运商揽收物品的揽收步序的执行命令(步骤s61)。信息处理装置100的第2数据通信电路104b向经由局域网络ln而连接的第2搬运机21发送执行命令。
[0195]
之后,信息处理装置100的第2数据通信电路104b从已按照执行命令执行揽收步序的第2搬运机21接收到告知该步序已完成的完成报告之后,执行设定第2时刻的如图17所示的第2时刻设定处理(步骤s62)。
[0196]
开始执行第2时刻设定处理之后,信息处理装置100的获取部120从第2数据通信电路104b获取完成报告,从完成报告获取揽收步序的步序id“p1”、及通过执行揽收步序而揽收到的物品的物品id(步骤s71)。接着,获取部120取得获取到步序id“p1”的获取时刻作为揽收物品的时刻。因此,获取部120例如获取os(operating system,操作系统)所管理的系统时刻作为步序id“p1”的获取时刻(步骤s72)。如此取得获取时刻是因为,在本实施例中,揽收物品的时刻表示揽收步序完成的时刻。另外,在本实施例中,从揽收步序执行完成的时刻起,至信息处理装置100接收揽收步序的完成报告,并从完成报告获取揽收步序的步序id“p1”的获取时刻为止的时长例如为“1”分钟等预先设定的长度以下,因此揽收物品的时刻、及获取到揽收步序的步序id“p1”的获取时刻可视为相同。
[0197]
接着,信息处理装置100的获取部120从图14的步序表获取与揽收步序的步序id“p1”配对的介入标记(步骤s73),管理部130判别为获取到的介入标记的值为表示揽收步序中有人介入的值“true”(步骤s74;是)。
[0198]
之后,信息处理装置100的管理部130将第2时刻初始化成获取时刻(步骤s75)。之后,管理部130将在步骤s71中获取到的物品id、及已初始化成获取时刻的第2时刻配对保存至图15的第2时刻表,由此将作为揽收物品的时刻而获取到的获取时刻作为第2时刻加以管
理。之后,管理部130结束第2时刻设定处理的执行。
[0199]
在图12的步骤s62中执行第2时刻设定处理之后,信息处理装置100的控制部110将第2搬运机21作为收件地,向第2数据通信电路104b输出命令执行向保管库搬运的搬运步序的执行命令(步骤s63)。
[0200]
之后,信息处理装置100接收到完成报告之后,将在图17的步骤s71中获取到的物品id作为自变量,执行更新第2时刻的如图18所示的第2时刻更新处理(步骤s64)。
[0201]
开始执行第2时刻更新处理之后,信息处理装置100的获取部120根据自变量获取已进行向保管库搬运的搬运步序的物品的物品id。另外,获取部120从第2数据通信电路104b获取自第2搬运机21发送过来的完成报告,并从完成报告获取向保管库搬运的搬运步序的步序id“p2”(步骤s81)。接着,获取部120获取步序id“p2”的获取时刻,作为向保管库22搬运的时刻。因此,获取部120例如获取os所管理的系统时刻,作为步序id“p2”的获取时刻(步骤s82)。如此取得获取时刻是因为,在本实施例中,向保管库22搬运的时刻表示向保管库搬运的搬运步序完成的时刻,且向保管库搬运的搬运步序完成的时刻与从完成报告获取该步序的步序id“p2”的获取时刻可视为相同。
[0202]
接着,信息处理装置100的获取部120从图14的步序表获取与向保管库搬运的搬运步序的步序id“p2”配对的介入标记(步骤s83)。之后,管理部130判别为获取到的介入标记的值为表示向保管库搬运的搬运步序中无人介入的值“false”(步骤s84;否),不更新第2时刻,而是结束第2时刻更新处理的执行。
[0203]
在图12的步骤s64中执行第2时刻更新处理之后,信息处理装置100的控制部110将第2搬运机21作为收件地,向第2数据通信电路104b输出命令执行向保管库储存的储存步序的执行命令(步骤s65)。
[0204]
之后,信息处理装置100接收到完成报告之后,执行第2时刻更新处理(步骤s66)。由此,信息处理装置100的管理部130判别为与向保管库储存的储存步序的步序id“p3”配对的介入标记的值为表示无人介入的值“false”,不更新第2时刻,而是予以维持。
[0205]
接着,信息处理装置100的获取部120从第2数据通信电路104b所接收到的完成报告,获取识别通过向保管库储存的储存步序而储存有物品的保管库22的储存箱225的储存箱id(步骤s67)。接着,管理部130将获取到的储存箱id、及以该储存箱id识别的储存箱225中储存的物品的物品id配对保存至图16的保管库表(步骤s68)。
[0206]
之后,信息处理装置100的控制部110将保管库22作为收件地,向第2数据通信电路104b输出上锁命令,该上锁命令包含在步骤s67中获取到的储存箱id,用来命令将以该储存箱id识别的储存箱225上锁(步骤s69),然后结束前段控制处理的执行。
[0207]
信息处理装置100的第1数据通信电路104a从终端装置19接收到包含物品编号与表示收件地址的信息的销售请求之后,信息处理装置100的cpu101执行如图19所示的后段控制处理,该后段控制处理进行使第1物流机构10及第2物流机构20执行后段步序的控制。
[0208]
信息处理装置100的信息存储部190预先存储有如图20所示的物品表,该物品表保存有与所销售的物品相关的信息。物品表中,配对保存有所销售的物品的物品id、表示该物品的收件地的信息、第1时刻、识别储存有该物品的寄存柜装置12的储存箱的储存箱id、及表示用于该物品的收件人认证的密码的信息。
[0209]
开始执行图19的后段控制处理之后,信息处理装置100的获取部120从第1数据通
信电路104a获取销售请求,从而获取被请求销售的物品的物品编号、及表示收件地的信息(步骤s91)。接着,获取部120从图15的第2时刻表,获取与获取到的物品编号配对的1个或多个第2时刻中最早的第2时刻。之后,获取部120获取与获取到的物品编号、及获取到的最早的第2时刻配对的个体识别编号(步骤s92)。
[0210]
接着,信息处理装置100的控制部110生成包含获取到的物品编号与个体识别编号的物品id,并选择以生成的物品id识别的物品,作为根据销售请求而销售的物品(步骤s93)。选择以销售请求中包含的物品编号、及与最早的第2时刻配对的个体识别编号识别的物品作为销售物品是为了,销售被人接触后经过时间最久的物品。
[0211]
接着,信息处理装置100的管理部130将生成的物品id、及表示以该物品id识别的物品的收件地的信息保存至图20的物品表(步骤s94)。
[0212]
之后,信息处理装置100的获取部120从图16的保管库表,获取与所销售的物品的物品id配对的储存箱id。之后,控制部110生成执行命令,该执行命令包含获取到的储存箱id,用来命令执行将以该储存箱id识别的保管库22的储存箱225中储存的物品取出的取出步序。接着,控制部110将第2搬运机21作为收件地,向第2数据通信电路104b输出生成的执行命令(步骤s95)。
[0213]
信息处理装置100的第2数据通信电路104b接收到告知第2搬运机21已到达保管库22来取出物品的到达报告后(步骤s96),信息处理装置100的控制部110生成命令将储存有所销售的物品的储存箱225解锁的解锁命令。接着,控制部110在生成的解锁命令中追加储存有所销售的物品的储存箱225的储存箱id之后,将保管库22作为收件地,向第2数据通信电路104b输出解锁命令(步骤s97)。
[0214]
之后,信息处理装置100接收到告知取出步序已完成的完成报告之后,执行图18所示的第2时刻更新处理(步骤s98)。由此,信息处理装置100的管理部130判别为与取出步序的步序id“p4”配对的介入标记的值为表示无人介入的值“false”,不更新第2时刻,而是予以维持。
[0215]
接着,信息处理装置100的控制部110将第2搬运机21作为收件地,向第2数据通信电路104b输出命令执行向第1搬运机搬运的搬运步序的执行命令(步骤s99)。之后,信息处理装置100接收到完成报告之后,执行图18所示的第2时刻更新处理(步骤s100)。这时,管理部130判别为与向第1搬运机搬运的搬运步序的步序id“p5”配对的介入标记的值为“false”,不更新第2时刻。
[0216]
接着,信息处理装置100的控制部110将第2搬运机21作为收件地,向第2数据通信电路104b输出命令执行将物品从第2搬运机21递交至第1搬运机11的递交步序的执行命令(步骤s101)。
[0217]
之后,信息处理装置100接收到完成报告之后,将在图19的步骤s93中生成的物品id作为自变量,执行设定第1时刻的如图21所示的第1时刻设定处理(步骤s102)。
[0218]
开始执行第1时刻设定处理之后,信息处理装置100的获取部120根据自变量获取已进行递交步序的物品的物品id。另外,获取部120从第2数据通信电路104b获取自第2搬运机21发送过来的完成报告,并从完成报告获取递交步序的步序id“p6”(步骤s111)。接着,获取部120取得获取步序id“p6”的获取时刻,作为递交物品的时刻(步骤s112)。
[0219]
接着,信息处理装置100的获取部120从图14的步序表,获取与递交步序的步序id“p6”配对的介入标记(步骤s113)。之后,管理部130判别为获取到的介入标记的值为“false”(步骤s114;否),而将第1时刻初始化成在进行递交之前人最后接触物品的时刻即第2时刻(步骤s115)。之后,管理部130从图20的物品表,检索保存有获取到的物品id的记录,并将已初始化成第2时刻的第1时刻与该物品id配对保存至检索到的记录,由此将第2时刻作为第1时刻加以管理。之后,管理部130结束第1时刻设定处理的执行。
[0220]
之后,信息处理装置100的控制部110将第1搬运机11作为收件地,向第1数据通信电路104a输出命令将第1搬运机11所具备的储存库上锁的上锁命令(步骤s103)。
[0221]
接着,信息处理装置100的控制部110将第1搬运机11作为收件地,向第1数据通信电路104a输出命令执行向寄存柜装置搬运的搬运步序的执行命令(步骤s104)。
[0222]
之后,信息处理装置100接收到完成报告之后,将物品id作为自变量,执行更新第1时刻的如图22所示的第1时刻更新处理(步骤s105)。
[0223]
开始执行第1时刻更新处理之后,信息处理装置100的获取部120根据自变量获取已进行向寄存柜装置搬运的搬运步序的物品的物品id。另外,获取部120从第1数据通信电路104a获取自第1搬运机11发送过来的完成报告,并从完成报告获取向寄存柜装置搬运的搬运步序的步序id“p7”(步骤s121)。接着,获取部120取得获取步序id“p7”的获取时刻,作为向寄存柜装置12搬运的时刻(步骤s122)。
[0224]
接着,信息处理装置100的获取部120从图14的步序表,获取与向寄存柜装置搬运的搬运步序的步序id“p7”配对的介入标记(步骤s123)。之后,管理部130判别为获取到的介入标记的值为“false”(步骤s124;否),不更新第1时刻,而是结束第1时刻更新处理的执行。
[0225]
在图19的步骤s105中执行第1时刻更新处理之后,信息处理装置100的控制部110将第1搬运机11作为收件地,向第1数据通信电路104a输出命令执行向寄存柜装置储存的储存步序的执行命令(步骤s106)。
[0226]
之后,信息处理装置100接收到完成报告之后,执行第1时刻更新处理(步骤s107)。由此,信息处理装置100的获取部120从自第1搬运机11发送过来的完成报告,获取向寄存柜装置储存的储存步序的步序id“p8”。另外,管理部130判别为与步序id“p8”配对的介入标记的值为“false”,不更新第1时刻,而是予以维持。
[0227]
之后,信息处理装置100的获取部120从自第1搬运机11发送过来的完成报告,获取识别储存有物品的寄存柜装置12的储存箱的储存箱id。接着,控制部110例如基于软件随机数或预先设定的规则,生成用于该物品的收件人认证的密码。之后,管理部130从图20的物品表,检索保存有在步骤s93中生成的物品id的记录,并将获取到的储存箱id、及生成的表示密码的信息与该物品id配对保存至检索到的记录(步骤s108)。
[0228]
接着,信息处理装置100的控制部110将寄存柜装置12作为收件地,向第1数据通信电路104a输出上锁命令,该上锁命令包含获取到的储存箱id,用来命令将以该储存箱id识别的储存箱上锁(步骤s109),然后结束后段控制处理的执行。
[0229]
信息处理装置100的cpu101结束后段控制处理的执行之后,执行通知步序,该通知步序进行告知物品已配送至收件地的寄存柜装置12的通知,因此将物品id作为自变量,执行如图23所示的通知处理。由此,信息处理装置100的cpu101作为如图13所示的通知部140而发挥功能。
[0230]
开始执行通知处理之后,信息处理装置100的获取部120根据自变量获取寄存柜装
置12中储存的物品的物品id。接着,获取部120从图20的物品表获取与获取到的物品id配对的第1时刻(步骤s131)。
[0231]
之后,信息处理装置100的获取部120获取信息存储部190预先存储的表示目标经过时间的信息(步骤s132)。接着,通知部140算出获取到的第1时刻加上以获取到的信息表示的目标经过时间而获得的时刻,作为建议收取开始时刻(步骤s133)。也可为获取部120还获取信息存储部190预先存储的表示余裕时间的信息,通知部140算出第1时刻加上目标经过时间与余裕时间所得的值,作为建议收取开始时刻。
[0232]
之后,信息处理装置100的获取部120从图20的物品表,获取与获取到的物品id配对的储存箱id、及表示密码的信息。接着,通知部140生成包含储存箱id、密码、获取到的第1时刻、及算出的建议收取开始时刻的通知。生成的通知包含告知如下情况的消息:物品已配送至收件地的寄存柜装置12的以该储存箱id识别的储存箱;收取该物品需要该密码;在第1时刻之后无人接触物品;及建议开始收取该物品的建议收取开始时刻。之后,通知部140将收件人所携带的终端装置19作为收件地,向第1数据通信电路104a输出生成的通知(步骤s134),然后结束通知处理的执行。
[0233]
信息处理装置100的第1数据通信电路104a从被看到通知的收件人加以操作的寄存柜装置12接收到问询是否允许将寄存柜装置12解锁的问询之后,信息处理装置100的cpu101执行未图示的是否允许解锁处理。
[0234]
开始执行是否允许解锁处理之后,信息处理装置100的获取部120从第1数据通信电路104a获取问询,并从获取到的问询获取储存箱id与表示密码的信息。之后,获取部120从图20的物品表,获取与获取到的储存箱id配对的表示密码的信息。接着,控制部110若判别为以从问询获取到的信息表示的密码与以从物品表获取到的信息表示的密码一致,则将寄存柜装置12作为收件地,向第1数据通信电路104a输出允许解锁的回复。与此相对地,控制部110若判别为所述密码不一致,则将寄存柜装置12作为收件地,向第1数据通信电路104a输出不允许解锁而是予以拒绝的回复。之后,控制部110结束是否允许解锁处理的执行。
[0235]
根据这些构成,物流系统1具备:第1物流机构10,包含将物品搬运至该物品的收件地的第1搬运机11;及管理部130,管理第1时刻,该第1时刻是比收取由第1搬运机11搬运的物品的收取时刻早的时刻,且是人接触该物品的最后时刻。因此,物流系统1能管理在收件人收取物品之前人接触该物品的最后时刻即第1时刻。
[0236]
另外,根据这些构成,物流系统1还具备第2物流机构20,该第2物流机构20是与第1物流机构10不同的机构,搬运或保管物品。另外,信息处理装置100的管理部130还管理第2时刻,该第2时刻是比第2物流机构20向第1物流机构10递交物品的递交时刻早的时刻,且是人接触第2物流机构20所搬运或保管的物品的最后时刻。因此,物流系统1能管理在向第1物流机构10递交物品之前人接触该物品的最后时刻即第2时刻。
[0237]
根据这些构成,物流系统1的管理部130在物品向第1搬运机11的递交中无人介入的情况下,将在进行该递交之前人最后接触物品的第2时刻作为第1时刻加以管理。也就是说,管理部130在物品从第2物流机构20向第1物流机构10的递交中无人介入的情况下,将第2时刻作为第1时刻加以管理。因此,物流系统1能基于在向搬运该物品的第1搬运机11递交该物品之前人接触该物品的最后时刻即第2时刻,管理在收件人收取物品之前人接触该物
品的最后时刻即第1时刻。
[0238]
根据这些构成,第1物流机构10还具备储存物品的寄存柜装置12,第1搬运机11将物品从第1搬运机11移动至寄存柜装置12。因此,物流系统1能在无人介入的条件下将物品从第1搬运机11移动至寄存柜装置12。由此,与物品从第1搬运机11向寄存柜装置12的移动中有人介入的情况相比,物流系统1能将第1时刻维持为更早的时刻。所以,即便在第1时刻物品上附着了病毒或细菌,物流系统1也能使病毒或细菌的感染力大小变得更小而将物品搬运至收件地。由此,即便物品上附着了病毒或细菌,物流系统1也能抑制该物品的收件人感染该病毒或该细菌。
[0239]
根据这些构成,物流系统1还具备基于第1时刻而通知收件人的通知部140。通知部140所进行的通知告知在第1时刻之后无人接触物品。因此,若收件人基于通知而在从第1时刻起经过了足够的时间之后才收取物品,则即便由于人的接触导致物品上附着了病毒或细菌,也能该物品的收件人抑制感染该病毒或细菌。
[0240]
根据这些构成,目标经过时间是从预先设定的病毒或细菌排出至人体外起,至该病毒或该细菌的感染力大小达到预先设定的大小以下为止的时间。另外,信息处理装置100的通知部140进行告知建议收取开始时刻的通知,该时刻是比第1时刻晚目标经过时间的时刻、或比该时刻更晚的时刻,且是建议开始收取物品的时刻。因此,若看到通知的收件人在比建议收取开始时刻晚的时刻收取物品,则即便由于人的接触导致物品上附着了病毒或细菌,也能抑制该物品的收件人感染该病毒或细菌。
[0241]
<实施例1的变化例1>
[0242]
在实施例1中,对从搬运商揽收物品的揽收步序中有人介入进行了说明,但并不限定于此。本变化例的揽收步序中无人介入。
[0243]
在本变化例中,搬运商使用具备未图示的第3搬运机的未图示的第3物流机构搬运物品,该第3搬运机具有与第2搬运机21的构成及功能相同的构成及功能,且为无人地面车辆。第3物流机构还具备管理第3时刻的未图示的信息处理装置,该第3时刻是比第2搬运机21从第3搬运机揽收物品的揽收时刻早的时刻,且是人接触该物品的最后时刻。第3物流机构的信息处理装置的构成及功能与信息处理装置100的构成及功能相同。
[0244]
搬运商的第3搬运机储存物品并到达揽收地点之后,第2搬运机21使用第2搬运机21的机械臂218,将第3搬运机中储存的物品取出,然后储存至第2搬运机21的储存库214,由此执行揽收步序。
[0245]
本变化例的步序表的第1条记录中,预先配对保存有识别揽收步序的步序id“p1”、表示名称的信息、及表示该揽收步序中无人介入的值为“false”的标记。
[0246]
信息处理装置100使用本变化例的步序表,开始执行图12所示的前段控制处理之后,执行步骤s61的处理(步骤s61)。由此,信息处理装置100向第2物流机构20的第2搬运机21发送命令执行揽收步序的执行命令。
[0247]
之后,信息处理装置100从第2搬运机21接收到告知揽收步序已执行完成的完成报告之后,执行图17所示的第2时刻设定处理(步骤s62)。信息处理装置100开始执行第2时刻设定处理之后,执行步骤s71至s74的处理(步骤s71至s74)。由此,信息处理装置100的获取部120获取揽收步序的步序id“p1”,管理部130根据本变化例的步序表,判别为与揽收步序的步序id“p1”配对的介入标记的值为表示揽收步序中无人介入的值“false”(步骤s74;
否)。
[0248]
接着,信息处理装置100的管理部130将第3物流机构的信息处理装置作为收件地,向第1数据通信电路104a输出请求发送表示第3时刻的信息的发送请求(步骤s76)。
[0249]
之后,信息处理装置100的第1数据通信电路104a从第3物流机构的信息处理装置接收到表示第3时刻的信息之后,信息处理装置100的获取部120从第1数据通信电路104a获取表示第3时刻的信息(步骤s77)。
[0250]
之后,信息处理装置100的管理部130将第2时刻初始化成以获取到的信息表示的第3时刻(步骤s78)。接着,管理部130将在步骤s71中获取到的物品id、及已初始化成第3时刻的第2时刻配对保存至图15的第2时刻表,由此将第3时刻作为第2时刻加以管理。之后,管理部130结束第2时刻设定处理的执行。
[0251]
在图12的步骤s62中执行第2时刻设定处理之后,执行步骤s63至s69的处理(步骤s63至s69),由此执行向保管库搬运的搬运步序、及向保管库储存的储存步序。在本变化例中,这些步序中无人介入,因此不更新第2时刻,而是予以维持。之后,结束前段控制处理的执行。
[0252]
之后,执行图19所示的后段控制处理。在本变化例中,后段步序中无人介入,因此将第1时刻设定为第2时刻之后,不更新第1时刻,而是予以维持。
[0253]
<实施例1的变化例2>
[0254]
在实施例1中,对向保管库搬运的搬运步序中无人介入进行了说明,但并不限定于此。本变化例的向保管库搬运的搬运步序中有人介入。
[0255]
在本变化例中,向保管库搬运的搬运步序并非由作为无人地面车辆的第2搬运机21进行,而是由经销商的工作人员进行。工作人员携带着具有与收件人所携带的终端装置19的构成及功能相同的构成及功能的未图示的终端装置。
[0256]
工作人员的终端装置从信息处理装置100接收到命令执行向保管库搬运的搬运步序的执行命令之后,显示命令执行该步序的消息。工作人员看到该消息之后,移动至收取地点,用手从停驻在收取地点的第2搬运机21的储存库214取出物品,并将物品手持搬运至保管库22。
[0257]
工作人员到达保管库22之后,操作工作人员的终端装置、或保管库22的输入装置。工作人员的终端装置或保管库22按照该操作,向信息处理装置100发送完成报告,该完成报告包含向保管库搬运的搬运步序的步序id“p2”,用来告知该步序已完成。
[0258]
本变化例的步序表的第2条记录中,预先配对保存有识别向保管库搬运的搬运步序的步序id“p2”、表示名称的信息、及表示向保管库搬运的搬运步序中有人介入的值为“true”的标记。
[0259]
信息处理装置100使用本变化例的步序表,开始执行图12所示的前段控制处理之后,执行步骤s61及s62的处理(步骤s61及s62),设定第2时刻。接着,信息处理装置100的控制部110将工作人员的终端装置作为收件地,向第1数据通信电路104a输出命令执行向保管库搬运的搬运步序的执行命令(步骤s63)。
[0260]
之后,信息处理装置100从终端装置或保管库22接收到完成报告之后,执行图18所示的第2时刻更新处理(步骤s64)。信息处理装置100开始执行第2时刻更新处理之后,执行步骤s81及s82的处理(步骤s81及s82)。由此,信息处理装置100的获取部120获取向保管库
搬运的搬运步序的步序id“p2”,并获取该步序id“p2”的获取时刻作为向保管库22搬运的时刻。如此取得获取时刻是因为,在本实施例中,向保管库22搬运的时刻表示向保管库搬运的搬运步序完成的时刻,且向保管库搬运的搬运步序完成的时刻与从完成报告获取该步序的步序id“p2”的获取时刻可视为相同。
[0261]
接着,信息处理装置100执行步骤s83的处理(步骤s83)。之后,信息处理装置100的管理部130根据本变化例的步序表,判别为与向保管库搬运的搬运步序的步序id“p2”配对的介入标记的值为表示该步序中有人介入的值“true”(步骤s84;是)。
[0262]
接着,信息处理装置100的管理部130在图15的第2时刻表中,将与在步骤s81中获取到的物品id配对的第2时刻更新成获取时刻,由此将作为向保管库22搬运的时刻而获取到的获取时刻作为第2时刻加以管理(步骤s85)。之后,管理部130结束第2时刻更新处理的执行。
[0263]
信息处理装置100在图12的步骤s64中执行第2时刻更新处理之后,执行步骤s65至s69的处理(步骤s65至s69),然后结束前段控制处理的执行。
[0264]
在本变化例中,对经销商的工作人员执行向保管库搬运的搬运步序的全部进行了说明,但并不限定于此,也可为工作人员只执行向保管库搬运的搬运步序的一部分。该情况下,可为第2搬运机21将物品搬运至揽收地点到保管库22的移动路线的中途之后,工作人员用手从第2搬运机21的储存库214取出物品,并将物品手持搬运至保管库22。
[0265]
在本变化例中,对向保管库搬运的搬运步序中有人介入进行了说明,但并不限定于此。也可为向保管库搬运的搬运步序中无人介入,但向保管库储存的储存步序、从保管库22取出物品的取出步序、及向第1搬运机搬运的搬运步序任一步序中有人介入。该情况下,可为经销商的工作人员进行向保管库储存的储存步序、取出步序、及向第1搬运机搬运的搬运步序的全部或一部分。
[0266]
<实施例1的变化例3>
[0267]
在实施例1中,对将物品递交至第1搬运机11的递交步序中无人介入进行了说明,但并不限定于此。本变化例的递交步序中有人介入。
[0268]
在本变化例中,递交步序并非由第2搬运机21进行,而是由经销商的工作人员进行。工作人员携带着实施例1的变化例2中所说明的终端装置。工作人员的终端装置与实施例1的变化例2同样地,接收到命令执行递交步序的执行命令之后,显示命令执行递交步序的消息。工作人员看到该消息之后,移动至递交地点,用手从停驻在递交地点的第2搬运机21的储存库214取出物品,并用手将物品储存至停驻在递交地点的第1搬运机11的储存库。
[0269]
工作人员完成递交步序之后,操作终端装置或第1搬运机11的输入装置。工作人员的终端装置或第1搬运机11按照该操作,向信息处理装置100发送完成报告,该完成报告包含递交步序的步序id“p6”,用来告知递交步序已完成。
[0270]
本变化例的步序表的第6条记录中,预先配对保存有识别递交步序的步序id“p6”、表示名称的信息、及表示递交步序中有人介入的值为“true”的标记。
[0271]
信息处理装置100使用本变化例的步序表,开始执行图19所示的后段控制处理之后,执行步骤s91至s100的处理(步骤s91至s100)。之后,信息处理装置100的控制部110将工作人员的终端装置作为收件地,向第1数据通信电路104a输出命令执行递交步序的执行命令(步骤s101)。
[0272]
之后,信息处理装置100从终端装置或第1搬运机11接收到完成报告之后,执行图21所示的第1时刻设定处理(步骤s102)。信息处理装置100开始执行第1时刻设定处理之后,执行步骤s111及s112的处理(步骤s111及s112)。由此,信息处理装置100的获取部120获取递交步序的步序id“p6”,并获取该步序id“p6”的获取时刻作为递交物品的时刻。如此获取递交时刻是因为,在本实施例中,进行递交的时刻表示递交步序完成的时刻,且递交步序完成的时刻与从完成报告获取递交步序的步序id“p6”的获取时刻可视为相同。
[0273]
接着,信息处理装置100执行步骤s113的处理(步骤s113)。之后,信息处理装置100的管理部130根据本变化例的步序表,判别为与递交步序的步序id“p6”配对的介入标记的值为表示递交步序中有人介入的值“true”(步骤s114;是)。
[0274]
接着,信息处理装置100的管理部130将第1时刻初始化成获取时刻(步骤s116)。接着,管理部130在图20的物品表中,检索保存有在步骤s111中获取到的物品id的记录,并将已初始化成获取时刻的第1时刻与该物品id配对保存至检索到的记录,由此将作为进行递交的时刻而获取到的获取时刻作为第1时刻加以管理。之后,管理部130结束第1时刻设定处理的执行。
[0275]
信息处理装置100在图19的步骤s102中执行第1时刻设定处理之后,执行步骤s103至s109的处理(步骤s103至s109)。之后,信息处理装置100结束后段控制处理的执行。
[0276]
在本变化例中,对经销商的工作人员执行递交步序的全部进行了说明,但并不限定于此,也可为工作人员只执行递交步序的一部分。该情况下,可为工作人员用手收取第2搬运机21使用机械臂218从第2搬运机21的储存库214取出的物品,并用手将收取到的物品储存至第1搬运机11的储存库。另外,该情况下,也可为第1搬运机11使用机械臂收取工作人员用手从第2搬运机21的储存库214取出的物品,然后工作人员用手将收取到的物品储存至第1搬运机11的储存库。
[0277]
<实施例1的变化例4>
[0278]
在实施例1中,对向寄存柜装置搬运的搬运步序中无人介入进行了说明,但并不限定于此。本变化例的向寄存柜装置搬运的搬运步序中有人介入。
[0279]
在本变化例中,向寄存柜装置搬运的搬运步序并非由作为无人地面车辆的第1搬运机11进行,而是由经销商的工作人员进行。工作人员完成向寄存柜装置搬运的搬运步序之后,操作实施例1的变化例2中所说明的终端装置、或寄存柜装置12的输入装置。工作人员的终端装置或寄存柜装置12按照该操作,向信息处理装置100发送完成报告,该完成报告包含向寄存柜装置搬运的搬运步序的步序id“p7”,用来告知该步序已完成。
[0280]
本变化例的步序表的第7条记录中,预先配对保存有识别向保管库搬运的搬运步序的步序id“p7”、表示名称的信息、及值为“true”的标记。
[0281]
使用本变化例的步序表,开始执行图19所示的后段控制处理之后,执行步骤s91至s103的处理(步骤s91至s103),然后信息处理装置100的控制部110将工作人员的终端装置作为收件地,向第1数据通信电路104a输出命令执行向寄存柜装置搬运的搬运步序的执行命令(步骤s104)。
[0282]
之后,信息处理装置100从移动终端或寄存柜装置12接收到完成报告之后,执行图22所示的第1时刻更新处理(步骤s105)。信息处理装置100开始执行第1时刻更新处理之后,执行步骤s121至s124的处理(步骤s121至s124)。由此,信息处理装置100的获取部120获取
向寄存柜装置搬运的搬运步序的步序id“p7”,并获取该步序id“p7”的获取时刻作为向寄存柜装置12搬运的时刻。另外,管理部130根据本变化例的步序表,判别为与向寄存柜装置搬运的搬运步序的步序id“p7”配对的介入标记的值为“true”(步骤s124;是)。
[0283]
接着,信息处理装置100的管理部130在图20的物品表中,将与在步骤s121中获取到的物品id配对的第1时刻更新成获取时刻(步骤s125),由此将作为向寄存柜装置12搬运的时刻而获取到的获取时刻作为第1时刻加以管理。之后,管理部130结束第1时刻更新处理的执行。
[0284]
信息处理装置100在图19的步骤s105中执行第1时刻更新处理之后,执行步骤s106至s109的处理(步骤s106至s109)。之后,信息处理装置100结束后段控制处理的执行。
[0285]
在本变化例中,对经销商的工作人员执行向寄存柜装置搬运的搬运步序的全部进行了说明,但并不限定于此,也可为工作人员只执行向寄存柜装置搬运的搬运步序的一部分。
[0286]
另外,在本变化例中,对向寄存柜装置搬运的搬运步序中有人介入进行了说明,但并不限定于此。也可为向寄存柜装置搬运的搬运步序中无人介入,但向寄存柜装置储存的储存步序中有人介入。该情况下,可为工作人员进行向寄存柜装置储存的储存步序的全部或一部分。
[0287]
根据这些构成,物流系统1的管理部130在物品向第1搬运机11的递交中有人介入的情况下,将进行该递交的时刻作为第1时刻加以管理。另外,根据这些构成,物流系统1所具备的信息处理装置100还具备获取识别步序的步序id的获取部120,该步序是与物品配送相关的步序,且是已对该物品执行的步序。另外,信息处理装置100所具备的管理部130在将识别步序的步序id与表示该步序中是否有人介入的标记配对存储多对的信息存储部190中,若与获取到的步序id配对的标记表示有人介入,则将第1时刻更新成获取到步序id的时刻。因此,例如与通过分析拍摄所得图像,检测到有人接触物品、及人接触物品的时刻,从而更新第1时刻的情况相比,物流系统1能以较少计算量更新第1时刻。另外,与这种情况相比,能简化物流系统1的构成,因此能降低物流系统1的制造费用及设置费用。
[0288]
<实施例1的变化例5>
[0289]
在实施例1、及实施例1的变化例2至4中,对揽收步序至向寄存柜装置储存的储存步序任一步序中有人介入进行了说明,但并不限定于此。也可为揽收步序至向寄存柜装置储存的储存步序任2个以上步序中有人介入。
[0290]
<实施例1的变化例6>
[0291]
在实施例1中,对第2搬运机21具备机械臂218进行了说明。另外,在实施例1中,对在向保管库储存的储存步序中,第2搬运机21使用机械臂218将物品从第2搬运机21移动至保管库22进行了说明。但并不限定于这些,也可为保管库22包含具有与第2搬运机21的机械臂218的构成及功能相同的构成及功能的未图示的机械臂。另外,也可为在向保管库储存的储存步序中,保管库22使用保管库22的机械臂将物品从第2搬运机21移动至保管库22。
[0292]
另外,也可为在向保管库储存的储存步序中,第2搬运机21与保管库22将物品从第2搬运机21移动至保管库22。该情况下,可为第2搬运机21使用机械臂218将物品从第2搬运机21取出之后,保管库22使用保管库22的机械臂从第2搬运机21收取被取出的物品,并使用保管库22的机械臂将收取到的物品储存至保管库22。
[0293]
在实施例1中,对在将物品从第2搬运机21递交至第1搬运机11的递交步序中,第2搬运机21使用机械臂218将物品从第2搬运机21移动至第1搬运机11进行了说明,但并不限定于此。也可为在递交步序中,第1搬运机11使用第1搬运机11的未图示的机械臂将物品从第2搬运机21移动至第1搬运机11。
[0294]
另外,也可为在递交步序中,第1搬运机11与第2搬运机21将物品从第2搬运机21移动至第1搬运机11。该情况下,可为第2搬运机21使用机械臂218将物品从第2搬运机21取出之后,第1搬运机11使用第1搬运机11的机械臂从第2搬运机21收取被取出的物品,并使用第1搬运机11的机械臂将收取到的物品储存至第1搬运机11。
[0295]
在实施例1中,对第1搬运机11具备未图示的机械臂进行了说明。另外,在实施例1中,对在向寄存柜装置储存的储存步序中,第1搬运机11使用第1搬运机11的机械臂将物品从第1搬运机11移动至寄存柜装置12进行了说明。但并不限定于这些,也可为寄存柜装置12包含具有与第2搬运机21的机械臂218的构成及功能相同的构成及功能的未图示的机械臂。另外,也可为在向寄存柜装置储存的储存步序中,寄存柜装置12使用寄存柜装置12的机械臂将物品从第1搬运机11移动至寄存柜装置12。
[0296]
另外,也可为在向寄存柜装置储存的储存步序中,第1搬运机11与寄存柜装置12将物品从第1搬运机11移动至寄存柜装置12。该情况下,可为第1搬运机11使用第1搬运机11的机械臂将物品从第1搬运机11取出之后,寄存柜装置12使用寄存柜装置12的机械臂从第1搬运机11收取被取出的物品,并使用寄存柜装置12的机械臂将收取到的物品储存至寄存柜装置12。
[0297]
<实施例1的变化例7>
[0298]
在实施例1中,对信息处理装置100的管理部130管理第1时刻及第2时刻进行了说明。另外,对信息处理装置100的通知部140执行告知在第1时刻之后无人接触物品的通知进行了说明。
[0299]
但并不限定于这些,本变化例的信息处理装置100的管理部130管理从第1时刻起算的经过时间即第1经过时间、及从第2时刻起算的经过时间即第2经过时间。另外,本变化例的通知部140执行告知持续第1经过时间之久无人接触物品的通知。
[0300]
因此,本变化例的信息处理装置100的信息存储部190预先存储有未图示的第2经过时间表,来取代图15所示的第2时刻表。第2经过时间表中,配对保存有识别物品的物品id、及识别线程的线程id,该线程执行对该物品的第2经过时间进行计时的计时程序。
[0301]
计时程序开始执行之后,会进行持续休眠1分钟的处理,然后使表示经过时间的计数增值“1”。之后,计时程序从休眠处理开始重复所述处理。
[0302]
本变化例的信息处理装置100在图12的步骤s62中,执行设定第2经过时间的如图24所示的第2经过时间设定处理,来取代图17所示的第2时刻设定处理。
[0303]
开始执行第2经过时间设定处理之后,信息处理装置100的获取部120执行与图17的步骤s71及s73相同的处理(步骤s141及s142),由此获取已进行揽收步序的物品的物品id、及揽收步序的步序id“p1”,并获取与获取到的揽收步序的步序id“p1”配对的介入标记。
[0304]
接着,信息处理装置100的管理部130若判别为获取到的介入标记的值为表示有人介入的值“true”(步骤s143;是),则生成执行对第2经过时间进行计时的计时程序的线程,获取部120从os获取识别生成的线程的线程id。
[0305]
之后,信息处理装置100的管理部130将计数初始化成“0”分钟,该计数是在生成的线程中执行的计时程序所使用的计数,且是表示第2经过时间的计数(步骤s144),然后开始计时程序的执行。由此,管理部130使计时程序对从揽收物品的时刻、或获取到揽收步序的步序id“p1”的获取时刻起算的经过时间进行计时。如此进行计时是因为,在本实施例中,进行揽收的时刻表示揽收步序完成的时刻,且从揽收步序执行完成的时刻起,至信息处理装置100从揽收步序的完成报告获取揽收步序的步序id“p1”,并基于与步序id配对的介入标记的值而将计数初始化,再次开始计时程序的执行,而后结束该执行的时刻为止的时长例如为“1”分钟等预先设定的长度以下。也就是说因为,揽收物品的时刻、获取到揽收步序的步序id“p1”的获取时刻、及再次开始计时程序的执行的时刻可视为相同。
[0306]
之后,信息处理装置100的管理部130将在步骤s141中获取到的物品id、及获取到的线程id配对保存至第2经过时间表,由此将由计时程序计时的时间作为第2经过时间加以管理。之后,管理部130结束第2经过时间设定处理的执行。
[0307]
在步骤s143中,信息处理装置100的管理部130若判别为获取到的介入标记的值为表示无人介入的值“false”(步骤s143;否),则生成请求发送表示从第3时刻起算的经过时间即第3经过时间的信息的发送请求。之后,管理部130将第3物流机构的信息处理装置作为收件地,向第1数据通信电路104a输出生成的发送请求(步骤s145)。
[0308]
信息处理装置100的第1数据通信电路104a接收到表示第3经过时间的信息之后,信息处理装置100的获取部120从第1数据通信电路104a获取表示第3经过时间的信息(步骤s146)。
[0309]
之后,信息处理装置100的管理部130生成线程,获取部120获取识别生成的线程的线程id。接着,管理部130将在生成的线程中执行的计时程序所使用的表示第2经过时间的计数初始化成第3经过时间之后(步骤s147),开始计时程序的执行。之后,管理部130将物品id与线程id配对保存至第2经过时间表,由此将第3经过时间作为第2经过时间加以管理。之后,管理部130结束第2经过时间设定处理的执行。
[0310]
另外,本变化例的信息处理装置100在图12的步骤s64及s66、以及图19的步骤s98及s100中,执行重设第2经过时间的如图25所示的第2经过时间重设处理,来取代图18所示的第2时刻更新处理。
[0311]
开始执行第2经过时间重设处理之后,信息处理装置100的获取部120执行与图18的步骤s81及s83相同的处理(步骤s151及s152),由此获取所执行的步序的步序id“p2”至“p5”中任一项、及已进行该步序的物品的物品id。另外,获取部120获取与获取到的步序id“p2”至“p5”中任一项配对的介入标记。
[0312]
接着,信息处理装置100的管理部130若判别为获取到的介入标记的值为表示无人介入的值“false”(步骤s153;否),则不重设第2经过时间,而是结束第2经过时间重设处理的执行。
[0313]
与此相对地,信息处理装置100的管理部130若判别为获取到的介入标记的值为表示有人介入的值“true”(步骤s153;是),则获取部120从未图示的第2经过时间表获取与物品id配对的线程id。之后,管理部130结束在以获取到的线程id识别的线程中执行的计时程序的执行之后,将计时程序的表示第2经过时间的计数初始化成“0”分钟(步骤s154)。接着,管理部130再次开始计时程序的执行。由此,管理部130使计时程序对从物品向保管库22搬
运的时刻、向保管库22储存的时刻、从保管库22取出的时刻、向第1搬运机11搬运的时刻、或获取到步序id“p2”至“p5”中任一项的获取时刻起算的经过时间进行计时。另外,由此,管理部130将由计时程序计时的时间作为第2经过时间加以管理。之后,管理部130结束第2经过时间重设处理的执行。
[0314]
进而,本变化例的信息处理装置100的信息存储部190预先存储有未图示的物品表,来取代图20所示的物品表。本变化例的物品表中,配对保存有所销售的物品的物品id、表示该物品的收件地的信息、识别储存有该物品的寄存柜装置12的储存箱的储存箱id、表示用于该物品的收件人认证的密码的信息、及执行对该物品的第1经过时间进行计时的计时程序的线程的线程id。
[0315]
本变化例的信息处理装置100在图19的步骤s101中输出命令执行递交步序的执行命令之后,在步骤s102中,执行设定第1经过时间的未图示的第1经过时间设定处理,来取代图21所示的第1时刻设定处理。
[0316]
信息处理装置100开始执行第1经过时间设定处理之后,执行与图24的步骤s141至s147相同的处理。由此,信息处理装置100的获取部120获取已进行递交步序的物品的物品id、及递交步序的步序id“p6”。接着,信息处理装置100的管理部130若判别为与递交步序的步序id“p6”配对的介入标记的值为表示有人介入的值“true”,则生成执行对第1经过时间进行计时的计时程序的线程。之后,管理部130将表示第1经过时间的计数初始化成“0”分钟,然后在该线程中开始计时程序的执行。由此,管理部130使计时程序对从进行递交的时刻、或获取到递交步序的步序id“p6”的获取时刻起算的经过时间进行计时。
[0317]
如此进行计时是因为,在本实施例中,进行递交的时刻表示递交步序完成的时刻,且从递交步序执行完成的时刻起,至接收到揽收步序的完成报告的信息处理装置100从完成报告获取揽收步序的步序id“p1”,并基于步序id而将计数初始化,再次开始计时程序的执行,而后结束该执行的时刻为止的时长为预先设定的长度以下。也就是说因为,进行递交的时刻、获取到递交步序的步序id“p6”的获取时刻、及再次开始计时程序的执行的时刻可视为相同。
[0318]
之后,信息处理装置100的管理部130将生成的线程的线程id与所销售的物品的物品id配对保存至本变化例的物品表。由此,管理部130将由计时程序计时的经过时间作为第1经过时间加以管理。之后,管理部130结束第1经过时间设定处理的执行。
[0319]
与此相对地,信息处理装置100的管理部130若判别为获取到的介入标记的值为表示无人介入的值“false”,则生成线程,将表示第1经过时间的计数初始化成第2经过时间,然后在该线程中开始计时程序的执行。接着,管理部130将线程id与物品id配对保存至物品表,由此将第2经过时间作为第1经过时间加以管理。之后,管理部130结束第1经过时间设定处理的执行。
[0320]
另外,本变化例的信息处理装置100在图19的步骤s105及s107中,执行重设第1经过时间的未图示的第1经过时间重设处理,来取代图22所示的第1时刻更新处理。
[0321]
信息处理装置100开始执行第1经过时间重设处理之后,执行与图25的步骤s151至s154相同的处理。由此,信息处理装置100获取识别已完成的步序的步序id、及已进行该步序的物品的物品id,并获取与获取到的步序id配对的介入标记。接着,信息处理装置100的管理部130若判别为获取到的介入标记的值为表示无人介入的值“false”,则不重设第1经
过时间,而是继续计时。之后,管理部130结束第1经过时间重设处理的执行。
[0322]
与此相对地,信息处理装置100若判别为获取到的介入标记的值为表示有人介入的值“true”,则获取与获取到的物品id配对的线程id。接着,信息处理装置100的管理部130结束在以获取到的线程id识别的线程中执行的计时程序的执行之后,将计时程序的表示第1经过时间的计数初始化成“0”分钟,然后再次开始计时程序的执行。由此,管理部130使计时程序对从向寄存柜装置12搬运或储存的时刻、或者获取到向寄存柜装置搬运的搬运步序的步序id“p7”或向寄存柜装置储存的储存步序的步序id“p8”的获取时刻起算的经过时间进行计时。另外,由此,管理部130将由计时程序计时的经过时间作为第1经过时间加以管理。之后,管理部130结束第1经过时间重设处理的执行。
[0323]
另外,本变化例的信息处理装置100的通知部140执行基于第1经过时间而通知收件人的未图示的通知处理,来取代基于第1时刻而通知收件人的图23所示的通知处理。
[0324]
信息处理装置100的获取部120在开始执行未图示的通知处理之后,从本变化例的物品表,获取与已配送至寄存柜装置12的物品的物品id配对的储存箱id及表示密码的信息、以及线程id。接着,获取部120查找在以线程id识别的线程中执行的计时程序所使用的计数的值,由此获取第1经过时间。
[0325]
之后,信息处理装置100的通知部140生成通知,该通知包含储存箱id、密码及第1经过时间,用来告知如下情况:物品已配送至收件地的寄存柜装置12的以该储存箱id识别的储存箱;取出该物品需要该密码;及持续第1经过时间之久无人接触物品。之后,通知部140将收件人所携带的终端装置19作为收件地,向第1数据通信电路104a输出生成的通知,然后结束通知处理的执行。
[0326]
根据这些构成,物流系统1具备:第1物流机构10,包含将物品搬运至该物品的收件地的第1搬运机11;及管理部130,管理从第1时刻起算的经过时间即第1经过时间,该第1时刻是比收取由第1搬运机11搬运的物品的收取时刻早的时刻,且是人接触该物品的最后时刻。因此,物流系统1能管理从收件人收取物品之前人接触该物品的最后时刻起算的经过时间即第1经过时间。
[0327]
另外,根据这些构成,物流系统1还具备第2物流机构20,该第2物流机构20是与第1物流机构10不同的机构,搬运或保管物品。另外,信息处理装置100的管理部130还管理从第2时刻起算的经过时间即第2经过时间,该第2时刻是比第2物流机构20向第1物流机构10递交物品的递交时刻早的时刻,且是人接触第2物流机构20所搬运或保管的该物品的最后时刻。因此,物流系统1能管理从向第1物流机构10递交物品之前人接触该物品的最后时刻起算的经过时间即第2经过时间。
[0328]
根据这些构成,物流系统1还具备基于第1经过时间而通知收件人的通知部140。通知部140所进行的通知告知持续第1经过时间之久无人接触物品。因此,若进行通知之后,等候了目标经过时间与第1经过时间的时间差之后,收件人才收取物品,则即便由于人的接触导致物品上附着了病毒或细菌,也能抑制该物品的收件人感染该病毒或该细菌。
[0329]
<实施例1的变化例8>
[0330]
实施例1的变化例3与实施例1的变化例7可组合。因此,信息处理装置100的管理部130在物品向第1搬运机11的递交中有人介入的情况下,能将从进行该递交的时刻起算的经过时间作为第1经过时间加以管理。
[0331]
<实施例1的变化例9>
[0332]
在实施例1中所说明的情况是,收件人在建议收取开始时刻以后,对寄存柜装置12所具备的输入装置进行输入储存箱id与密码的操作,但并不限定于此。在本变化例中,收件人在比建议收取开始时刻早的时刻,对寄存柜装置12所具备的输入装置进行输入储存箱id与密码的操作。
[0333]
本变化例的寄存柜装置12如实施例1中所说明的那般,按照该操作,向信息处理装置100发送包含储存箱id与密码的问询。信息处理装置100即便在比建议收取开始时刻早的时刻接收到问询,只要问询中包含的储存箱id与密码的组合和发送至终端装置19的储存箱id与密码的组合一致,也回复允许解锁。与此相对地,信息处理装置100在所述组合不一致时,回复不允许解锁。
[0334]
<实施例1的变化例10>
[0335]
在实施例1的变化例9中所说明的情况是,信息处理装置100即便在比建议收取开始时刻早的时刻接收到问询,只要问询中包含的储存箱id与密码的组合和发送至终端装置19的储存箱id与密码的组合一致,也回复允许解锁。但并不限定于此,也可为信息处理装置100若在比建议收取开始时刻早的时刻接收到问询,则回复不允许解锁。
[0336]
因此,本变化例的信息处理装置100的信息存储部190预先存储有未图示的物品表,来取代图20的物品表。本变化例的物品表中,配对保存有所销售的物品的物品id、表示该物品的收件地的信息、该物品的第1时刻、识别储存有该物品的寄存柜装置12的储存箱的储存箱id、表示用于该物品的收件人认证的密码的信息、及该物品的建议收取开始时刻。
[0337]
本变化例的信息处理装置100执行未图示的通知处理,来取代图23的通知处理。开始执行本变化例的通知处理之后,执行与图23的步骤s131至s133相同的处理。由此,获取寄存柜装置12中储存的物品的第1时刻,并基于获取到的第1时刻算出建议收取开始时刻。
[0338]
之后,信息处理装置100的管理部130从本变化例的物品表,检索保存有该物品的物品id的记录,并将算出的建议收取开始时刻与该物品id配对保存至检索到的记录。
[0339]
之后,信息处理装置100执行与图23的步骤s134相同的处理,由此向收件人所携带的终端装置19发送包含第1时刻、建议收取开始时刻、储存箱id及密码的通知,然后结束通知处理的执行。
[0340]
信息处理装置100的第1数据通信电路104a从被看到通知的收件人加以操作的寄存柜装置12接收到问询之后,信息处理装置100的cpu101执行未图示的是否允许解锁处理。
[0341]
开始执行是否允许解锁处理之后,信息处理装置100的获取部120从接收到的问询获取储存箱id与表示密码的信息,并从本变化例的物品表获取与由问询获取到的储存箱id配对的建议收取开始时刻。接着,获取部120例如从os获取系统时刻,控制部110若判别为获取到的系统时刻为比获取到的建议收取开始时刻早的时刻,则将寄存柜装置12作为收件地,向第1数据通信电路104a输出不允许解锁的回复。
[0342]
与此相对地,信息处理装置100的获取部120若判别为获取到的系统时刻为获取到的建议收取开始时刻以后的时刻,则如实施例1中所说明的那般,从本变化例的物品表获取与获取到的储存箱id配对的表示密码的信息。接着,控制部110若判别为以从问询获取到的信息表示的密码与以从物品表获取到的信息表示的密码一致,则将寄存柜装置12作为收件地,向第1数据通信电路104a输出允许解锁的回复。与此相对地,控制部110若判别为所述密
码不一致,则将寄存柜装置12作为收件地,向第1数据通信电路104a输出不允许解锁的回复。之后,控制部110结束是否允许解锁处理的执行。
[0343]
根据这些构成,目标经过时间是从预先设定的病毒或细菌排出至人体外起,至该病毒或该细菌的感染力大小达到预先设定的大小以下为止的时间。另外,物流系统1还具备控制部110,该控制部110在比第1时刻晚目标经过时间的建议收取开始时刻以后,对第1物流机构10的第1搬运机11进行控制使其将物品搬运至设置在收件地的寄存柜装置12,然后进行控制使其储存搬运过来的物品并将上锁的寄存柜装置12解锁。因此,物流系统1能将物品的收取时刻设定为建议收取开始时刻以后,所以即便由于人的接触导致物品上附着了病毒或细菌,也能抑制该物品的收件人感染该病毒或细菌。
[0344]
<实施例1的变化例11>
[0345]
实施例1的变化例7与实施例1的变化例10可组合。作为实施例1的变化例7与实施例1的变化例10的组合的本变化例的信息处理装置100的控制部110在第1经过时间成为目标经过时间的时刻以后,进行将寄存柜装置12解锁的控制。
[0346]
因此,信息处理装置100的获取部120从自收件人的终端装置19接收到的问询获取储存箱id与表示密码的信息,并从本变化例的物品表获取与自问询获取到的储存箱id配对的线程id。接着,获取部120查找在以获取到的线程id识别的线程中执行的计时程序的计数,由此获取第1经过时间。之后,获取部120从信息存储部190获取表示目标经过时间的信息。
[0347]
接着,信息处理装置100的控制部110若判别为获取到的第1经过时间的长度小于获取到的目标经过时间的长度,则判别为系统时刻是比第1经过时间成为目标经过时间的建议收取开始时刻早的时刻。之后,控制部110将寄存柜装置12作为收件地,向第1数据通信电路104a输出不允许解锁的回复。
[0348]
与此相对地,信息处理装置100的控制部110若判别为获取到的第1经过时间的长度为获取到的目标经过时间的长度以上,则判别为系统时刻是建议收取开始时刻以后的时刻。之后,控制部110若判别为以从问询获取到的信息表示的密码与以从物品表获取到的信息表示的密码一致,则输出允许解锁的回复,若判别为所述密码不一致,则输出不允许解锁的回复。
[0349]
<实施例1的变化例12>
[0350]
在实施例1中,对信息处理装置100的通知部140在物品储存至寄存柜装置12之后,执行告知物品已配送至寄存柜装置12的通知进行了说明,但并不限定于此。本变化例的信息处理装置100的通知部140在建议收取开始时刻经过之后,进行告知物品已配送至寄存柜装置12的通知。
[0351]
因此,本变化例的信息处理装置100的信息存储部190预先存储有未图示的物品表,来取代图20的物品表。本变化例的物品表中,配对保存有物品id、表示收件地的信息、第1时刻、储存箱id、表示密码的信息、建议收取开始时刻、及表示是否已进行通知的标记。
[0352]
本变化例的信息处理装置100的cpu101在图19所示的后段控制处理的执行结束,从而物品储存至寄存柜装置12之后,执行算出该物品的建议收取开始时刻的未图示的时刻计算处理。
[0353]
信息处理装置100开始执行时刻计算处理之后,执行与图23的步骤s131至s133相
同的处理。由此,获取寄存柜装置12中储存的物品的第1时刻,并基于获取到的第1时刻算出建议收取开始时刻。之后,信息处理装置100的管理部130从本变化例的物品表,检索保存有该物品的物品id的记录,并将算出的建议收取开始时刻、及表示未进行通知的标记与该物品id配对保存至检索到的记录。之后,管理部130结束建议收取开始时刻计算处理的执行。
[0354]
本变化例的信息处理装置100的cpu101起动之后,以预先设定的间隔例如1分钟执行未图示的通知处理,来取代图23所示的通知处理。
[0355]
开始执行本变化例的通知处理之后,信息处理装置100的获取部120例如从os获取系统时刻。接着,通知部140对本变化例的物品表中是否存在保存有获取到的系统时刻以前的建议收取开始时刻、及表示未进行通知的标记的记录进行判别。这时,通知部140若判别为不存在这种记录,则结束通知处理的执行。
[0356]
与此相对地,在信息处理装置100的通知部140若判别为存在这种记录,则获取部120从这种记录中选择1条,并从所选择的记录获取储存箱id及密码。
[0357]
之后,通知部140生成告知如下情况的通知:物品已配送至收件地的寄存柜装置12的以该储存箱id识别的储存箱;收取该物品需要该密码;及从人最后接触该物品起已经过目标经过时间。
[0358]
接着,信息处理装置100的通知部140将收件人所携带的终端装置19作为收件地,向第1数据通信电路104a输出生成的通知。之后,通知部140将所选择的记录的标记更新成表示已进行通知的标记之后,结束通知处理的执行。
[0359]
根据这些构成,物流系统1的通知部140在比第1时刻起晚目标经过时间的时刻即建议收取开始时刻以后,还进行告知从人最后接触物品起已经过目标经过时间的通知。因此,若收件人看到该通知而收取物品,则即便由于人的接触导致物品上附着了病毒或细菌,也能抑制收件人感染该病毒或细菌。另外,收件人即便不知道目标经过时间,只要看到该通知,也能知道由于从人最后接触物品起已经过目标经过时间,所以该病毒或细菌的感染力大小已达到预先设定的大小以下,因此对收件人来说方便性提高。
[0360]
根据这些构成,物流系统1的通知部140在建议收取开始时刻以后,进行告知物品已配送至收件地的寄存柜装置12的通知,且在建议收取开始时刻之前,不进行该通知。因此,例如,即便在比建议收取开始时刻早的时刻不限制寄存柜装置12的解锁,物流系统1也能将收取时刻设定为建议收取开始时刻以后的时刻。所以,即便由于人的接触导致物品上附着了病毒或细菌,也能抑制收件人感染该病毒或细菌。
[0361]
<实施例1的变化例13>
[0362]
实施例1的变化例7与实施例1的变化例12可组合。因此,作为实施例1的变化例7与实施例1的变化例12的组合的本变化例的信息处理装置100的通知部140在第1经过时间成为目标经过时间的时刻以后,还进行告知从人最后接触物品起已经过目标经过时间的通知。
[0363]
<实施例1的变化例14>
[0364]
在实施例1中,对物流系统1所具备的第1物流机构10具备第1搬运机11及寄存柜装置12进行了说明,但并不限定于此。本变化例的第1物流机构10具备第1搬运机11,但不具备寄存柜装置12。本变化例的第1搬运机11将物品搬运至该物品的收件地之后,停驻在收件地。
[0365]
第1搬运机11也可在收件地附近以预先设定的速度以下的速度巡回行驶或往返行驶。收件地附近是比与收件地相距预定距离的边界线更靠收件地侧的区域。
[0366]
收件人对第1搬运机11所具备的未图示的输入装置进行输入密码的操作。第1搬运机11所具备的未图示的cpu基于从输入装置输出的信号,获取表示密码的信息,并将信息处理装置100作为收件地,向数据通信电路输出包含获取到的信息的问询。
[0367]
之后,若第1搬运机11的数据通信电路从信息处理装置100接收到不允许解锁的回复,则第1搬运机11的cpu使未图示的显示装置显示告知密码错误的消息。与此相对地,若接收到允许解锁的回复,则第1搬运机11的cpu向驱动电路输出将储存库解锁的控制信号。收件人将已被解锁的储存库的门打开,收取所购买的物品。
[0368]
<实施例1的变化例15>
[0369]
在实施例1中,对寄存柜装置12设置在收件人所居住的高级公寓的入口进行了说明,但并不限定于此。寄存柜装置12也可设置在包括公寓在内的公共住宅、写字楼、酒店、包括便利店、商场及百货商店在内的商业设施、或包括车站、机场及公交站台在内的公共设施的入口,或者独栋住宅的玄关。另外,寄存柜装置12还可设置在公共住宅、写字楼、酒店、商业设施或公共设施的大厅。进而,寄存柜装置12另可设置在独栋住宅、公共住宅、写字楼、酒店、商业设施或公共设施的庭院或者停车场。另外,寄存柜装置12又可设置在公共住宅、写字楼、酒店、商业设施或公共设施的道路上。
[0370]
在实施例1的变化例14中,对第1搬运机11停驻在收件地、或者在收件地附近巡回行驶或往返行驶进行了说明。供第1搬运机11停驻的收件地点、或进行巡回行驶等的收件地附近也可为公共住宅、写字楼、酒店、商业设施或公共设施的入口,或者独栋住宅的玄关。另外,供第1搬运机11停驻的收件地点、或进行巡回行驶等的收件地附近还可为公共住宅、写字楼、酒店、商业设施或公共设施的大厅,另可为独栋住宅、公共住宅、写字楼、酒店、商业设施或公共设施的庭院或者停车场,又可为公共住宅、写字楼、酒店、商业设施或公共设施的道路上。
[0371]
<实施例1的变化例16>
[0372]
在实施例1中所说明的情况是,物流系统1具备:第1搬运机11,具备未图示的机械臂,且为无人地面车辆;及寄存柜装置12,通过第1搬运机11储存物品。但并不限定于此,本变化例的物流系统1具备:第1搬运机11,为如图26所示的例如无人机等无人航空器,且不具备机械臂;及寄存柜装置12,具备未图示的机械臂,且以该机械臂储存第1搬运机11搬运过来的物品。
[0373]
第1搬运机11具备控制第1搬运机11的姿势及飞行的控制装置910。第1搬运机11具备从控制装置910的前面向右前方及左前方、以及从控制装置910的后面向左后方及右后方分别突出的螺旋桨臂921及922、以及923及924。进而,第1搬运机11具备:螺旋桨931至934,分别设置在螺旋桨臂921至924的前端;及未图示的马达,按照控制装置910的控制,使螺旋桨931至934旋转。
[0374]
另外,在第1搬运机11的控制装置910的下面,设置有储存物品的储存库940。储存库940具备未图示的箱体、门、门框、死螺栓及闩销。储存库940所具备的箱体、门、门框、死螺栓及闩销的构成及功能与第2搬运机21所具备的储存箱215的箱体、门215a、门框215b、死螺栓215c及闩销215d的构成及功能相同。
[0375]
第1搬运机11还具备支撑脚943,该支撑脚943从控制装置910的下面向下方突出,支撑控制装置910。另外,第1搬运机11具备设置在控制装置910的前面的lidar传感器951、及设置在控制装置910的后面的未图示的lidar传感器。第1搬运机11所具备的前面的lidar传感器951及后面的lidar传感器的构成及功能分别与第2搬运机21所具备的前面的lidar传感器216及后面的lidar传感器的构成及功能相同。
[0376]
第1搬运机11还具备拍摄装置961,该拍摄装置961的光轴及视角经过调整,以能拍摄第1搬运机11的前方。第1搬运机11所具备的拍摄装置961的构成及功能与第2搬运机21所具备的拍摄装置217的构成及功能相同。
[0377]
第1搬运机11的控制装置910具备未图示的cpu、ram、rom、闪速存储器、数据通信电路、视频卡、显示装置、输入装置、位置计测电路、输入输出端及驱动电路这些硬件。第1搬运机11的控制装置910所具备的这些硬件的构成及功能与图3所示的第2搬运机21的控制装置219所具备的硬件的构成及功能相同。
[0378]
第1搬运机11的驱动电路连接于与使螺旋桨931至934旋转的未图示的马达分别连接的未图示的线缆。驱动电路按照cpu所输出的信号,驱动使螺旋桨931至934旋转的未图示的马达。
[0379]
第1搬运机11的数据通信电路接收到从信息处理装置100发送过来的执行命令之后,第1搬运机11的cpu按照执行命令,执行配送步序。
[0380]
在本变化例中所说明的情况是,物流系统1具备:第1搬运机11,为无人航空器,且不具备机械臂;及寄存柜装置12,具备机械臂。另外,在本变化例中所说明的情况是,寄存柜装置12使用寄存柜装置12的机械臂,将第1搬运机11搬运过来的物品从第1搬运机11移动至寄存柜装置12。但并不限定于此,物流系统1也可具备:第1搬运机11,为无人航空器,且具备机械臂;及寄存柜装置12,通过第1搬运机11的机械臂储存物品。
[0381]
另外,在本变化例中,对物流系统1具备作为无人航空器的第1搬运机11、及作为无人地面车辆的第2搬运机21进行了说明,但并不限定于此。物流系统1也可具备作为无人航空器的第1搬运机11及第2搬运机21。
[0382]
另外,在本变化例中,对第1搬运机11为无人航空器进行了说明,但并不限定于此,其也可为无人飞翔体。进而,在本变化例中,对第1搬运机11为通过螺旋桨931至934获得扬力及推力的无人机进行了说明,但并不限定于此。第1搬运机11也可具备机翼,通过机翼获得扬力,还可具备充满比重较空气小的气体的气嚢,通过气嚢获得扬力。另外,第1搬运机11又可具备喷射引擎或火箭引擎,通过喷射引擎或火箭引擎获得推力。
[0383]
在实施例1中,对寄存柜装置12设置在收件人所居住的高级公寓的入口进行了说明,但并不限定于此,其也可设置在独栋住宅、公共住宅、写字楼、酒店、商业设施或公共设施的阳台或者屋顶。
[0384]
本变化例与第1搬运机11停驻在收件地、或者在收件地附近巡回行驶或往返行驶的实施例1的变化例14可组合。该情况下,供第1搬运机11着陆的收件地点、或进行巡回飞行、往返飞行或悬停飞行的收件地附近也可为独栋住宅、公共住宅、写字楼、酒店、商业设施或公共设施的阳台或者屋顶。
[0385]
<实施例1的变化例17>
[0386]
在实施例1中,对第1搬运机11为无人地面车辆进行了说明,但未必为无人,也可载
人,只要是除了信息处理装置100进行的控制以外,其他均自主地移动的物体即可。
[0387]
<实施例1的变化例18>
[0388]
在实施例1中,对第1搬运机11为无人地面车辆进行了说明,但并不限定于此。本变化例的第1搬运机11为按照搭乘于第1搬运机11的驾驶员的操作而行驶的有人地面车辆。
[0389]
在本变化例中,将物品从第2搬运机21递交至第1搬运机11的递交步序中,第1搬运机11的驾驶员接触物品,而将该物品从第2搬运机21移动至第1搬运机11,所以在本变化例中,递交步序中有人介入。因此,第1搬运机11可具备也可不具备机械臂,例如也可为包括货车在内的汽车。
[0390]
另外,并不限定于此,在递交步序中,也可并非由第1搬运机11的驾驶员,而是由第2搬运机21的机械臂218、及第1搬运机11的未图示的机械臂中的1个以上机械臂将物品从第2搬运机21移动至第1搬运机11。也就是说,递交步序中也可无人介入。
[0391]
另外,在本变化例中,向寄存柜装置搬运的搬运步序中,物品储存在第1搬运机11的储存库内,因此第1搬运机11的驾驶员不接触物品,而是操纵第1搬运机11,使其将物品搬运至寄存柜装置12。所以,在本变化例中,向寄存柜装置搬运的搬运步序中无人介入。但并不限定于此,若向寄存柜装置搬运的搬运步序中,第1搬运机11的驾驶员需要接触物品,则向寄存柜装置搬运的搬运步序中也可有人介入。
[0392]
进而,在本变化例中,物流系统1与实施例1的变化例14同样地,不具备保管库22。因此,本变化例的第1搬运机11将物品搬运至收件地之后,不执行向寄存柜装置储存的储存步序,而是停驻在收件地,然后根据收件人的操作将物品递交至收件人。收件人从第1搬运机11的储存库收取物品。
[0393]
但并不限定于此,物流系统1也可与实施例1同样地,具备保管库22,第1搬运机11将物品搬运至收件地之后,执行向寄存柜装置储存的储存步序。该情况下,可为向寄存柜装置储存的储存步序中,第1搬运机11的驾驶员需要接触物品来将其从第1搬运机11移动至寄存柜装置12,从而向寄存柜装置储存的储存步序中有人介入。另外,该情况下,也可为驾驶员无需接触物品来将其从第1搬运机11移动至寄存柜装置12,而是由第1搬运机11的机械臂将物品从第1搬运机11移动至寄存柜装置12,因此向寄存柜装置储存的储存步序中无人介入。进而,该情况下,还可为寄存柜装置12具备未图示的机械臂,因此驾驶员无需接触物品,而是由寄存柜装置12的机械臂将物品从第1搬运机11移动至寄存柜装置12。
[0394]
另外,在实施例1中,对第2搬运机21为无人地面车辆进行了说明,但并不限定于此,第2搬运机21也可为按照搭乘于第2搬运机21的驾驶员的操作而行驶的有人地面车辆。进而,也可为从搬运商揽收物品的揽收步序、向保管库搬运的搬运步序、向保管库储存的储存步序、从保管库22取出物品的取出步序、及向第1搬运机搬运的搬运步序中,驾驶员无需接触物品,从而这些步序中无人介入。与此相对地,也可为这些步序中,驾驶员需要接触物品,从而这些步序中有人介入。
[0395]
<实施例1的变化例19>
[0396]
在实施例1中,对将目标经过时间预先设定为预先设定的病毒或细菌的感染力大小达到预先设定的大小以下所用的时间进行了说明。预先设定的病毒或细菌均可为任意的病毒或细菌,例如可为sars(severe acute respiratory syndrome,严重急性呼吸综合症)-cov(coronavirus,冠状病毒)-2。该情况下,目标经过时间可为sars-cov-2的感染力大
小达到预先设定的大小以下所用的72小时,也可短于或长于72小时。
[0397]
另外,预先设定的病毒例如也可为流感病毒,还可为诺罗病毒或轮状病毒。预先设定的细菌例如可为大肠杆菌或溶链菌。
[0398]
<实施例1的变化例20>
[0399]
第1搬运机11及第2搬运机21所搬运的物品任意,可为行李或货物。另外,物品并不限定于物件,也可为生物。
[0400]
<实施例1的变化例21>
[0401]
在实施例1中,对第1物流机构10具备1个第1搬运机11、及1个寄存柜装置12进行了说明,但并不限定于此。第1物流机构10也可具备n1个第1搬运机11、及m1个寄存柜装置12(其中,n1及m1均为自然数)。另外,在实施例1中,对第2物流机构20具备1个第2搬运机21、及1个保管库22进行了说明,但并不限定于此。第2物流机构20也可具备n2个第2搬运机21、及m2个保管库22(其中,n2及m2均为自然数)。
[0402]
<实施例1的变化例22>
[0403]
在实施例1中所说明的情况是,第1搬运机11搬运1个物品,并将所搬运的1个物品储存至寄存柜装置12所具备的1个储存箱。另外,所说明的情况是,信息处理装置100的通知部140进行包含寄存柜装置12的1个储存箱中储存的1个物品的第1时刻及建议收取开始时刻的通知,该通知用来告知在第1时刻之后无人接触这1个物品、及这1个物品的建议收取开始时刻。
[0404]
但并不限定于这些,第1搬运机11也可搬运多个物品,并将所搬运的多个物品储存至寄存柜装置12所具备的1个储存箱。另外,信息处理装置100的通知部140也可进行包含寄存柜装置12的1个储存箱中储存的多个物品的第1时刻中最晚的第1时刻、及这多个物品的建议收取开始时刻中最晚的建议收取开始时刻的通知。包含最晚的第1时刻及最晚的建议收取开始时刻的通知是告知在该最晚的第1时刻之后无人接触这多个物品中的任一个、及建议开始收取这多个物品的时刻是最晚的建议收取开始时刻的通知。
[0405]
在实施例1中,对第2搬运机21将1个物品储存至保管库22所具备的1个储存箱225进行了说明,但并不限定于此。第2搬运机21也可将第2时刻相同的多个物品储存至同一个储存箱225。
[0406]
<实施例1的变化例23>
[0407]
在实施例1中,对信息处理装置100具备信息存储部190进行了说明,但并不限定于此。本变化例的信息处理装置100不具备信息存储部190。本变化例的信息处理装置100例如为nas(network attached storage,网络连接存储),且经由因特网in连接于具有与信息存储部190的功能相同的功能的未图示的信息存储装置。本变化例的物流系统1可具备信息存储装置,也可不具备信息存储装置。本变化例的信息处理装置100使用信息存储装置所存储的信息,执行图12所示的前段控制处理、图17所示的第2时刻设定处理、图18所示的第2时刻更新处理、图19所示的后段控制处理、图21所示的第1时刻设定处理、图22所示的第1时刻更新处理、及图23所示的通知处理。
[0408]
<实施例1的变化例24>
[0409]
在实施例1中,对终端装置19为智能手机进行了说明,但并不限定于此,也可为平板型个人计算机或笔记本型个人计算机。
[0410]
<实施例2>
[0411]
在实施例1中所说明的情况是,信息处理装置100接收到销售请求之后,对第2搬运机21进行控制使其将所销售的物品从保管库22取出并递交至第1搬运机11,然后对第1搬运机11进行控制使其将递交过来的物品搬运至收件地。但并不限定于此。
[0412]
本实施例的信息处理装置100接收到销售请求之后,以从人最后接触所销售的物品的第2时刻起,截至收件人收取该物品的收取时刻,经过目标经过时间的方式,决定从第2搬运机21向第1搬运机11递交该物品的递交时机。之后,信息处理装置100进行第2搬运机21的控制以在所决定的递交时机进行递交之后,对第1搬运机11进行控制使其将递交过来的物品搬运至收件地。以下,对于与实施例1相同的构成,使用与实施例1中使用的符号相同的符号进行说明,但主要对本实施例与实施例1的不同进行说明。
[0413]
本实施例的信息处理装置100的第1数据通信电路104a接收到销售请求之后,信息处理装置100的cpu101执行如图27所示的后段控制处理。由此,信息处理装置100的cpu101作为如图28所示的推导部150、及决定部160而发挥功能,该推导部150推导从递交物品的递交地点搬运至该物品的收件地所需的搬运时间,该决定部160基于推导出的搬运时间而决定递交时机。
[0414]
开始执行图27的后段控制处理之后,信息处理装置100执行与图19的步骤s91至s94相同的处理(步骤s161至s164),由此选择所销售的物品。之后,信息处理装置100将所选择的物品的物品id作为自变量,执行决定所销售的物品的递交时机的如图29所示的时机决定处理。
[0415]
开始执行时机决定处理之后,信息处理装置100的获取部120根据自变量获取物品id,并从图20的物品表获取与获取到的物品id配对的表示收件地的信息(步骤s181)。之后,获取部120获取与表示收件地址的信息预先配对存储在信息存储部190中的表示纬度、经度及高度的信息。
[0416]
之后,信息处理装置100的控制部110执行与图4的步骤s02相同的处理,由此决定物品从递交至第1搬运机11的递交地点到该物品的收件地的移动路径(步骤s182)。
[0417]
接着,信息处理装置100的获取部120获取信息存储部190中预先存储的表示第1搬运机11的移动速度的信息。第1搬运机11的移动速度可为预先设定的速度,也可为过去计测所得的第1搬运机11的移动速度的平均速度。
[0418]
之后,信息处理装置100的推导部150算出所决定的移动路径的距离,并使算出的距离除以由获取到的信息表示的速度。由此,推导部150推导第1搬运机11沿着移动路径行驶,而将物品从递交地点搬运至收件地所需的搬运时间(步骤s183)。
[0419]
之后,信息处理装置100的获取部120获取信息存储部190中预先存储的表示目标经过时间的信息。接着,决定部160算出作为目标经过时间的第1目标经过时间减去推导出的搬运时间而获得的时间,作为第2目标经过时间(步骤s184)。之后,获取部120从图20的物品表,获取与获取到的物品id配对的第2时刻,决定部160将第2时刻加上第2目标经过时间而获得的时刻决定为递交时机即递交时刻(步骤s185)。之后,决定部160结束时机决定处理的执行。
[0420]
在图27的步骤s165中,时机决定处理的执行结束之后,信息处理装置100的控制部110生成执行命令,该执行命令包含表示所决定的递交时机的信息,用来命令执行将所销售
的物品从保管库22取出的取出步序、向第1搬运机搬运的搬运步序、及递交步序。之后,控制部110将第2搬运机21作为收件地,向第2数据通信电路104b输出生成的执行命令(步骤s166)。
[0421]
接收到执行命令的第2搬运机21基于执行命令中包含的递交时机,决定开始向保管库22的位置移动以从保管库22取出物品的移动开始时机。之后,第2搬运机21在所决定的移动开始时机到来之后,开始向保管库22移动。
[0422]
信息处理装置100接收到告知第2搬运机21已到达保管库22的到达报告之后,执行与图19的步骤s96及s97相同的处理(步骤s167及s168),由此将保管库22解锁。
[0423]
之后,已完成取出步序的执行的第2搬运机21发送告知取出步序已完成的完成报告,信息处理装置100的第2数据通信电路104b接收到完成报告之后,执行图18所示的第2时刻更新处理(步骤s169)。
[0424]
接着,第2搬运机21在执行向第1搬运机搬运的搬运步序之后,发送完成报告,信息处理装置100接收到该完成报告之后,再次执行第2时刻更新处理(步骤s170)。
[0425]
之后,第2搬运机21在递交时机,执行将物品递交至第1搬运机11的递交步序,然后发送完成报告。信息处理装置100接收到该完成报告之后,执行图21所示的第1时刻设定处理(步骤s171)。
[0426]
接着,信息处理装置100执行与图19的步骤s103至s109的处理相同的处理(步骤s172至s178),由此进行使第1搬运机11执行向寄存柜装置搬运的搬运步序、及向寄存柜装置储存的储存步序的控制。由此,信息处理装置100在建议收取开始时刻,对第1搬运机11进行控制使其完成物品向寄存柜装置12的搬运,该建议收取开始时刻是比递交时机晚搬运时间的时刻,且是比第1时刻晚目标经过时间的时刻。
[0427]
本变化例的第2搬运机21的数据通信电路接收到在图27的步骤s166中输出的执行命令之后,第2搬运机21的cpu219a执行如图30所示的取出处理。
[0428]
开始执行取出处理之后,第2搬运机21的cpu219a执行与图9的步骤s31及s32相同的处理(步骤s191及s192)。由此,第2搬运机21决定第2搬运机21的位置至保管库22的移动路径、及保管库22至递交地点的移动路径。
[0429]
接着,第2搬运机21的cpu219a执行与图29的步骤s183相同的处理,由此推导从第2搬运机21的位置移动至保管库22的移动时间、及从保管库22移动至递交地点的移动时间(步骤s193)。
[0430]
之后,第2搬运机21的cpu219a从数据通信电路219e获取执行命令,并从获取到的执行命令获取表示递交时机的信息。之后,第2搬运机21的cpu219a获取表示从保管库22取出物品所需的取出时间的信息,该信息是闪速存储器219d预先存储的信息。取出时间例如可为预先设定的时间,也可为过去计测所得的第2搬运机21从保管库22取出物品所需的时间的平均值。
[0431]
另外,第2搬运机21的cpu219a获取表示第2搬运机21将物品递交至第1搬运机11所需的递交时间的信息,该信息是闪速存储器219d预先存储的信息。递交时间例如可为预先设定的时间,也可为过去计测所得的第2搬运机21递交物品所需的时间的平均值。
[0432]
接着,第2搬运机21的cpu219a算出从第2搬运机21的位置移动至保管库22的移动时间、取出时间、从保管库22移动至递交地点的移动时间、及递交时间的合计时间。之后,第
2搬运机21的cpu219a将比以获取到的信息表示的递交时机早算出的合计时间的时刻决定为开始向保管库22移动的移动开始时机(步骤s194)。
[0433]
基于这种合计时间而决定移动开始时机是因为,在本实施例中,递交物品的递交时机表示递交完成的时机。但递交时机并不限定于此,也可表示递交开始的时机,从而第2搬运机21的cpu219a基于移动至保管库22的移动时间、取出时间、及从保管库22移动至递交地点的移动时间的合计时间,算出移动开始时机。另外,递交时机也可表示进行递交的期间内包含的一个时点。
[0434]
之后,第2搬运机21的cpu219a例如从os获取系统时刻,并对获取到的时刻是否为所决定的移动开始时机以后的时刻进行判别(步骤s195)。这时,cpu219a若判别为系统时刻是比移动开始时机早的时刻(步骤s195;否),则在休眠预先设定的时间例如1分钟之后,从步骤s195开始重复所述处理。
[0435]
与此相对地,第2搬运机21的cpu219a若判别为系统时刻是移动开始时机以后的时刻(步骤s195;是),则执行与图9的步骤s33至s41的处理相同的处理(步骤s196至s204)。由此,第2搬运机21开始向保管库22移动,执行取出步序,然后结束取出处理的执行。
[0436]
结束执行取出处理之后,第2搬运机21执行实施例1中所说明的未图示的第1搬运机搬运处理,由此进行向第1搬运机搬运的搬运步序。之后,结束第1搬运机搬运处理的执行之后,第2搬运机21执行图10所示的递交处理。由此,第2搬运机21在由信息处理装置100决定的递交时机,向第1搬运机11递交物品。在本实施例中,所谓在递交时机递交物品是指,在递交时机完成物品的递交。但并不限定于此,也可表示在递交时机开始物品的递交,还可表示在递交时机正进行物品的递交。
[0437]
根据这些构成,物流系统1还具备决定部160,该决定部160基于第2时刻,以从人最后接触物品的第2时刻起,截至收件人收取物品的收取时刻,经过目标经过时间的方式,决定从第2物流机构20向第1物流机构10的第1搬运机11递交物品的递交时机。另外,根据这些构成,目标经过时间是从预先设定的病毒或细菌排出至人体外起,至该病毒或该细菌的感染力大小达到预先设定的大小以下为止的时间。另外,物流系统1还具备控制部110,该控制部110在比第1时刻晚目标经过时间的时刻,对第1物流机构10的第1搬运机11进行控制使其将物品搬运至收件地。因此,即便由于人的接触导致物品上附着了病毒或细菌,因为是从人最后接触物品起经过目标经过时间之后,才将物品搬运至收件地,所以物流系统1能切实地抑制在收件地收取物品的收件人感染该病毒或细菌。
[0438]
进而,根据这些构成,物流系统1还具备推导部150,该推导部150基于收件地,推导第1物流机构10的第1搬运机11将物品搬运至收件地所需的搬运时间。另外,决定部160算出比作为目标经过时间的第1目标经过时间短推导出的搬运时间的第2目标经过时间,并将比第2时刻晚第2目标经过时间的时刻的时机决定为递交时机。因此,物流系统1能以在比第2时刻晚目标经过时间的时刻向收件地搬运物品的方式,决定递交时机。由此,在收件人从第1搬运机11收取物品的情况下,即便由于人的接触导致物品上附着了病毒或细菌,物流系统1也能抑制收件人感染该病毒或细菌,且能缩短第1搬运机11停留在收件地的时间,从而提高第1搬运机11搬运物品的搬运效率。第1搬运机11的搬运效率例如由每单位时间内第1搬运机11所搬运的物品的数量表示,但并不限定于此。进而,在第1搬运机11将物品移动至寄存柜装置12,从而收件人从寄存柜装置12收取物品的情况下,物流系统1能抑制感染,且能
缩短寄存柜装置12储存物品的时间,从而提高寄存柜装置12的保管效率。寄存柜装置12的保管效率例如由每单位时间内寄存柜装置12所保管的物品的数量表示,但并不限定于此。
[0439]
<实施例2的变化例1>
[0440]
在实施例2中,对信息处理装置100的决定部160将第2时刻加上第2目标经过时间而获得的时刻决定为递交时机进行了说明,但并不限定于此。信息处理装置100的决定部160也可将第2时刻加上第2目标经过时间而获得的时刻以后的时刻决定为递交时机。
[0441]
<实施例2的变化例2>
[0442]
在实施例2中,对信息处理装置100的决定部160决定递交时机进行了说明,但并不限定于此。本变化例的决定部160也可决定第2搬运机21为了取出物品而开始向保管库22移动的移动开始时机。
[0443]
本变化例的信息处理装置100开始执行图27的后段控制处理之后,执行步骤s161至s164的处理(步骤s161至s164),由此选择所销售的物品。
[0444]
之后,信息处理装置100执行与图30的步骤s191至s194的处理相同的处理,由此决定移动开始时机(步骤s165)。
[0445]
之后,信息处理装置100的获取部120例如从os获取系统时刻,控制部110执行对获取到的系统时刻是否为移动开始时机以后的时刻进行判别的处理。这时,控制部110若判别为系统时刻是比移动开始时机早的时刻,则在休眠预先设定的时间之后,从对系统时刻是否为移动开始时机以后的时刻进行判别的处理开始重复所述处理。
[0446]
与此相对地,信息处理装置100的控制部110若判别为系统时刻是移动开始时机以后的时刻,则将第2搬运机21作为收件地,向第2数据通信电路104b输出命令执行取出步序、向第1搬运机搬运的搬运步序、及递交步序的执行命令。
[0447]
之后,信息处理装置100执行图27的步骤s167至s178的处理(步骤s167至s178)。由此,信息处理装置100与实施例2同样地,在建议收取开始时刻,对第1搬运机11进行控制使其完成物品向寄存柜装置12的搬运,该建议收取开始时刻是比递交时机晚搬运时间的时刻,且是比第1时刻晚目标经过时间的时刻。之后,信息处理装置100结束后段控制处理的执行。
[0448]
<实施例2的变化例3>
[0449]
在实施例2中,对信息处理装置100的决定部160基于第2时刻而决定递交时机进行了说明,但并不限定于此。本变化例的信息处理装置100的决定部160基于所销售的物品的第2时刻及该物品的类别,决定递交时机。
[0450]
本变化例的信息存储部190预先存储有如图31所示的物品编号表,该物品编号表保存有与物品的物品编号相关的信息。物品编号表中预先保存有多条记录,各记录中预先配对保存有物品编号、及识别被分配了该物品编号的物品的类别的类别id。在本实施例中,物品的类别是由物品表面部件的材质决定的类别,但并不限定于此。表面部件的材质例如包括玻璃、塑料、纸及金属,由表面部件的材质决定的类别例如包括玻璃产品、塑料产品、纸产品及金属产品,但并不限定于这些。
[0451]
另外,本变化例的信息存储部190预先存储有如图32所示的类别表,该类别表保存有与物品类别相关的信息。类别表中预先保存有多条记录,各记录中预先配对保存有识别类别的类别id、及用来决定该类别物品的建议收取开始时刻的目标经过时间的修正系数。
将类别id与修正系数预先配对是因为,病毒或细菌的感染力的减小速度与附着了该病毒或细菌的材质的类别相关。
[0452]
本变化例的信息处理装置100使用图31及图32所示的表,执行如图33所示的时机决定处理。信息处理装置100开始执行时机决定处理之后,执行与图29的步骤s181至s183的处理相同的处理(步骤s211至s213),由此推导将物品从递交地点搬运至收件地所需的搬运时间。
[0453]
之后,信息处理装置100的获取部120从图31的物品编号表,获取与所销售的物品的物品id中包含的物品编号配对的类别id(步骤s214)。接着,获取部120从图32的类别表,获取与获取到的类别id配对的修正系数(步骤s215)。由此,获取部120获取与所销售的物品的表面部件的类别对应的修正系数。
[0454]
之后,信息处理装置100的获取部120获取信息存储部190中预先存储的表示第1目标经过时间的信息。接着,决定部160使第1目标经过时间乘以在步骤s215中获取到的修正系数,由此修正第1目标经过时间(步骤s216)。
[0455]
之后,信息处理装置100的决定部160算出修正后的第1目标经过时间减去在步骤s213中推导出的搬运时间而获得的时间,作为第2目标经过时间(步骤s217)。
[0456]
接着,信息处理装置100的获取部120从图20的物品表,获取与所销售的物品的物品id配对的第2时刻,决定部160使在步骤s217中算出的第2目标经过时间加上第2时刻,由此决定递交时机(步骤s218)。之后,决定部160结束时机决定处理的执行。
[0457]
根据这些构成,物流系统1的决定部160基于第2时刻及物品的类别,决定递交时机。病毒或细菌的感染力的减小速度与附着了该病毒或细菌的物品的类别相关,因此即便由于与人接触导致物品上附着了病毒或细菌,例如与仅基于第2时刻而决定递交时机的情况相比,能切实地抑制该物品的收件人感染该病毒或细菌。
[0458]
<实施例2的变化例4>
[0459]
在实施例2的变化例3中,对信息处理装置100的决定部160基于所销售的物品的第2时刻及该物品的类别而决定递交时机进行了说明。但并不限定于此,本变化例的信息处理装置100的决定部160基于所销售的物品的第2时刻、及包装该物品的包装部件的类别,决定递交时机。
[0460]
因此,本变化例的物品编号表的各记录中,预先配对保存有物品编号、及识别被分配了该物品编号的物品的包装部件的类别的类别id。包装部件例如包括玻璃盒、塑料盒、纸板及尼龙袋,但并不限定于此。另外,在本实施例中,包装部件的类别是由包装部件的材质决定的类别,但并不限定于此。包装部件的材质包括玻璃、塑料、纸或纸板、尼龙及金属,由包装部件的材质决定的类别例如包括玻璃包装、塑料包装、纸包装、尼龙包装及金属包装,但并不限定于这些。
[0461]
<实施例2的变化例5>
[0462]
基于所销售的物品的第2时刻及该物品的类别而决定递交时机的实施例2的变化例3与基于所销售的物品的第2时刻及该物品的包装部件的类别而决定递交时机的实施例2的变化例4可组合。作为实施例2的变化例3与实施例2的变化例4的组合的本变化例的信息处理装置100的决定部160基于物品的第2时刻及该物品的类别,决定递交时机的第1候补,且基于物品的第2时刻及该物品的包装部件的类别,决定递交时机的第2候补。之后,决定部
160采用第1候补与第2候补中较晚的那个候补,将所采用的候补决定为递交时机。
[0463]
<实施例2的变化例6>
[0464]
在实施例2的变化例3中,对信息处理装置100的决定部160基于第2时刻及物品的类别而决定递交时机进行了说明,但并不限定于此。本变化例的信息处理装置100的决定部160基于所销售的物品的第2时刻、及从第2时刻起至向第1搬运机11递交该物品为止的期间内该物品的环境,决定递交时机。
[0465]
因此,本变化例的物流系统1具备未图示的环境传感器,该环境传感器计测从第2时刻起至向第1搬运机11递交该物品为止的期间内,保管或搬运物品的第2物流机构20的环境。在本变化例中,第2物流机构20设置在经销商的仓库,第2物流机构20的环境包括第2物流机构20的气温,所以环境传感器设置在能计测仓库气温的位置。
[0466]
另外,物品被从搬运商揽收过来之后,至销售出去为止,始终储存而保管在保管库22的储存箱225的内部。因此,在本变化例中,环境传感器设置在仓库内设置的保管库22所具备的储存箱225的内部,计测储存箱225的内部气温。所以,环境传感器例如为ic(integrated circuit,集成电路)温度传感器,连接于信息处理装置100,将计测所得的表示储存箱225的内部温度的信号输出至信息处理装置100。
[0467]
本变化例的信息存储部190预先存储有如图34所示的环境表,该环境表保存有与环境相关的信息。环境表中预先保存有多条记录,各记录中预先配对保存有表示预先设定的温度范围的信息、及用来决定物品的建议收取开始时刻的目标经过时间的修正系数,该物品保管在气温包含于该范围内的地点。将表示温度范围的信息与修正系数预先配对是因为,病毒或细菌的感染力的减小速度与附着了该病毒或细菌的地点的温度相关。
[0468]
本变化例的信息处理装置100使用图34所示的表,执行如图35所示的时机决定处理。信息处理装置100开始执行时机决定处理之后,执行与图33的步骤s211至s213的处理相同的处理(步骤s221至s223),由此推导搬运时间。
[0469]
接着,信息处理装置100的获取部120获取信息存储部190中预先存储的表示第1目标经过时间的信息,决定部160算出以获取到的信息表示的第1目标经过时间减去在步骤s223中推导出的搬运时间而获得的时间,作为第2目标经过时间(步骤s224)。
[0470]
之后,信息处理装置100的获取部120基于未图示的环境传感器所输出的信号,获取表示保管库22内的气温的信息(步骤s225)。接着,获取部120基于获取到的气温,获取修正系数。因此,获取部120从图34的环境表,获取与表示温度范围的信息配对的修正系数,该范围内包含以获取到的信息表示的温度(步骤s226)。
[0471]
之后,信息处理装置100的获取部120使算出的第2目标经过时间乘以在步骤s226中获取到的修正系数,由此基于修正系数而修正第2目标经过时间(步骤s227)。
[0472]
接着,信息处理装置100的决定部160执行与图33的步骤s218的处理相同的处理,由此基于第2时刻、及修正后的第2目标经过时间,决定递交时机(步骤s228),然后结束时机决定处理的执行。
[0473]
根据这些构成,物流系统1的决定部160基于从人最后接触物品的第2时刻起至向第1搬运机11递交物品为止的期间内物品的环境、及第2时刻,决定递交时机。病毒或细菌的感染力的减小速度与附着了该病毒或细菌的地点的环境相关,因此即便由于与人接触导致物品上附着了病毒或细菌,例如与仅基于第2时刻而决定递交时机的情况相比,能切实地抑
制该物品的收件人感染该病毒或细菌。
[0474]
<实施例2的变化例7>
[0475]
在实施例2的变化例6中所说明的情况是,信息处理装置100的决定部160基于所销售的物品的第2时刻、及从第2时刻起至向第1搬运机11递交该物品为止的期间内保管该物品的保管库22内的气温,决定递交时机。但并不限定于此。本变化例的信息处理装置100的决定部160基于物品的第2时刻、及从第2时刻起至向第1搬运机11递交该物品为止的期间内保管该物品的保管库22内的湿度或照度,决定递交时机。
[0476]
本实施例的环境传感器是计测保管库22所具备的储存箱225的内部湿度的电气式湿度计、或计测照度的电气式照度计。
[0477]
本变化例的环境表的各记录中,预先配对保存有表示预先设定的湿度或照度的范围的信息、及物品的修正系数,该物品保管在湿度或照度包含于该范围内的地点。所谓物品的修正系数是指,用来决定该物品的建议收取开始时刻的目标经过时间的修正系数。如此将表示湿度或照度的范围的信息与修正系数预先配对是因为,病毒或细菌的感染力的减小速度与附着了该病毒或细菌的地点的湿度或照度相关。
[0478]
<实施例2的变化例8>
[0479]
实施例2的变化例3至7可各自组合。因此,作为实施例2的变化例3至7的组合的本变化例的信息处理装置100的决定部160基于所销售的物品的第2时刻、该物品的类别、该物品的包装部件的类别、及该物品的环境中任一项以上,决定递交时机,其中该物品的环境包含从人最后接触该物品的第2时刻起至收件人收取物品的收取时刻为止的期间内的气温、湿度及照度中任一项以上。
[0480]
<实施例2的变化例9>
[0481]
管理第1经过时间与第2经过时间的实施例1的变化例7与实施例2可组合。作为实施例1的变化例7与实施例2的组合的本变化例的信息处理装置100的决定部160基于所销售的物品的第2经过时间,决定递交时机。
[0482]
因此,本变化例的信息处理装置100的获取部120在图29的步骤s185中,从未图示的第2经过时间表,获取与所销售的物品的物品id配对的线程id。接着,获取部120查找在以线程id识别的线程中执行的计时程序所使用的计数的值,由此获取第2经过时间。
[0483]
之后,信息处理装置100的获取部120例如从os获取系统时刻。接着,信息处理装置100的决定部160将比系统时刻晚第2目标经过时间减去获取到的第2经过时间而获得的经过时间的时刻决定为递交时机即递交时刻。也就是说,决定部160将第2经过时间成为第2目标经过时间的时刻决定为递交时机。
[0484]
<实施例2的变化例10>
[0485]
在实施例2的变化例9中,对信息处理装置100的决定部160将第2经过时间成为第2目标经过时间的时刻决定为递交时机进行了说明,但并不限定于此。信息处理装置100的决定部160也可将第2经过时间成为第2目标经过时间的时刻以后的时刻决定为递交时机。
[0486]
实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例1至10可相互各自组合。当然可作为具备用来实现实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例1至10中任一例的功能的构成的信息处理装置100来提供,也可作为由多个装置构成,且系统整体上具备用来实现实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例
1至10中任一例的功能的构成的系统来提供。
[0487]
另外,通过程序的应用,可使现有的信息处理装置作为实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例1至10中任一例的信息处理装置100而发挥功能。也就是说,通过将用来实现实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例1至10中任一例所例示的信息处理装置100的各功能构成的程序以能由现有的对控制装置进行控制的计算机(cpu等)来执行的方式应用,能使该计算机作为实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例1至10中任一例的信息处理装置100而发挥功能。
[0488]
这种程序的发布方法任意,例如,可搭载在存储卡、cd-rom(compact disc read only memory,只读光盘)、或dvd-rom(digital versatile disk read only memory,数字多功能盘只读存储器)等记录介质中来发布,此外也可经由因特网等通信媒体来发布。另外,本发明的方法可使用实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例1至10中任一例的信息处理装置100、以及实施例1、实施例1的变化例1至24、实施例2及实施例2的变化例1至10中任一例的物流系统1来实施。
[0489]
以上对本发明的优选实施例进行了详细叙述,但本发明并不限定于该特定的实施例,在权利要求书所述的本发明的主旨范围内,可进行各种变化、变更。
[0490]
(附记)
[0491]
(附记1)
[0492]
一种物流系统,其特征在于,具备:
[0493]
第1物流机构,包含将物品搬运至所述物品的收件地的搬运机;及
[0494]
管理部,管理第1时刻、或从所述第1时刻起算的经过时间即第1经过时间,所述第1时刻是比收取由所述搬运机搬运的所述物品的收取时刻早的时刻,且是人接触所述物品的最后时刻。
[0495]
(附记2)
[0496]
根据附记1所述的物流系统,其特征在于:
[0497]
所述管理部在所述物品向所述搬运机的递交中有人介入的情况下,将进行该递交的时刻作为所述第1时刻加以管理,或将从进行该递交的该时刻起算的经过时间作为所述第1经过时间加以管理。
[0498]
(附记3)
[0499]
根据附记2所述的物流系统,其特征在于:
[0500]
所述管理部在所述物品向所述搬运机的所述递交中无人介入的情况下,将在进行所述递交之前人最后接触所述物品的时刻作为所述第1时刻加以管理,或将从进行所述递交之前人最后接触所述物品的所述时刻起算的经过时间作为所述第1经过时间加以管理。
[0501]
(附记4)
[0502]
根据附记1至3中任一项所述的物流系统,其特征在于:
[0503]
所述物流系统还具备通知部,所述通知部基于所述第1时刻或所述第1经过时间,向所述物品的收件人进行通知。
[0504]
(附记5)
[0505]
根据附记4所述的物流系统,其特征在于:
[0506]
所述通知告知在所述第1时刻之后无人接触所述物品、或持续所述第1经过时间之
久无人接触所述物品。
[0507]
(附记6)
[0508]
根据附记4或5所述的物流系统,其特征在于:
[0509]
所述通知部在比所述第1时刻晚目标经过时间的时刻以后、或所述第1经过时间成为所述目标经过时间的时刻以后,还进行告知从人最后接触所述物品起算已经过所述目标经过时间的通知。
[0510]
(附记7)
[0511]
根据附记1至6中任一项所述的物流系统,其特征在于:
[0512]
所述第1物流机构还具备储存所述物品的寄存柜装置,且
[0513]
所述搬运机及所述寄存柜装置中任一者以上将所述物品从所述搬运机移动至所述寄存柜装置。
[0514]
(附记8)
[0515]
根据附记1至7中任一项所述的物流系统,其特征在于:
[0516]
所述物流系统还具备第2物流机构,所述第2物流机构是与所述第1物流机构不同的机构,搬运或保管所述物品;
[0517]
所述管理部还管理第2时刻、或从所述第2时刻起算的经过时间即第2经过时间,所述第2时刻是比所述第2物流机构向所述第1物流机构递交所述物品的递交时刻早的时刻,且是人接触所述第2物流机构所搬运或保管的所述物品的最后时刻。
[0518]
(附记9)
[0519]
根据附记8所述的物流系统,其特征在于:
[0520]
所述管理部在所述物品从所述第2物流机构向所述第1物流机构的递交中无人介入的情况下,将所述第2时刻作为所述第1时刻加以管理,或将所述第2经过时间作为所述第1经过时间加以管理。
[0521]
(附记10)
[0522]
根据附记9所述的物流系统,其特征在于:
[0523]
还具备决定部,所述决定部基于所述第2时刻或所述第2经过时间,以从人最后接触所述物品的所述第2时刻起,截至收取所述物品的所述收取时刻,经过目标经过时间的方式,决定所述物品从所述第2物流机构向所述第1物流机构的所述搬运机递交的递交时机。
[0524]
(附记11)
[0525]
根据附记10所述的物流系统,其特征在于:
[0526]
所述物流系统还具备推导部,所述推导部基于所述收件地,推导所述第1物流机构的所述搬运机将所述物品搬运至所述收件地所需的搬运时间;且
[0527]
所述决定部算出比作为所述目标经过时间的第1目标经过时间短推导出的所述搬运时间的第2目标经过时间,将比所述第2时刻晚所述第2目标经过时间的时刻、或所述第2经过时间成为所述第2目标经过时间的时刻以后的时机决定为所述递交时机。
[0528]
(附记12)
[0529]
根据附记10或11所述的物流系统,其特征在于:
[0530]
所述决定部还基于所述物品的类别、包装所述物品的包装部件的类别、及从人最后接触所述物品的所述第2时刻起至向所述搬运机递交所述物品为止的期间内所述物品的
环境中任一项以上,决定所述递交时机。
[0531]
(附记13)
[0532]
根据附记6所述的物流系统,其特征在于:
[0533]
所述目标经过时间是从预先设定的病毒或细菌排出至人体外起,至该病毒或该细菌的感染力大小达到预先设定的大小以下为止的时间,且
[0534]
所述通知部进行告知建议收取开始时刻的所述通知,所述建议收取开始时刻是比所述第1时刻晚所述目标经过时间的时刻、或该时刻之后的时刻,且是建议开始收取所述物品的时刻。
[0535]
(附记14)
[0536]
根据附记6所述的物流系统,其特征在于:
[0537]
所述目标经过时间是从预先设定的病毒或细菌排出至人体外起,至该病毒或该细菌的感染力大小达到预先设定的大小以下为止的时间,且
[0538]
所述物流系统还具备控制部,所述控制部在比所述第1时刻晚所述目标经过时间的时刻以后、或所述第1经过时间成为所述目标经过时间的时刻以后,对所述第1物流机构的所述搬运机进行控制使其完成所述物品向所述收件地的搬运。
[0539]
(附记15)
[0540]
根据附记6所述的物流系统,其特征在于:
[0541]
所述目标经过时间是从预先设定的病毒或细菌排出至人体外起,至该病毒或该细菌的感染力大小达到预先设定的大小以下为止的时间,且
[0542]
所述物流系统还具备控制部,所述控制部在比所述第1时刻晚所述目标经过时间的时刻以后、或所述第1经过时间成为所述目标经过时间的时刻以后,对所述第1物流机构的所述搬运机进行控制使其将所述物品搬运至设置在所述收件地的寄存柜装置,然后进行控制使其储存搬运过来的所述物品并将上锁的所述寄存柜装置解锁。
[0543]
(附记16)
[0544]
根据附记1至15中任一项所述的物流系统,其特征在于:
[0545]
还具备获取识别步序的步序识别信息的获取部,所述步序是与所述物品的配送相关的步序,且是已对所述物品进行的所述步序;且
[0546]
所述管理部在将识别所述步序的所述步序识别信息与表示所述步序中是否有人介入的信息配对存储多对的存储部中与获取到的所述步序识别信息配对的所述信息表示有人介入的情况下,将获取到所述步序识别信息的获取时刻作为所述第1时刻加以管理,或将从该获取时刻起算的经过时间作为所述第1经过时间加以管理。
[0547]
(附记17)
[0548]
一种信息处理装置,其特征在于,具备:
[0549]
控制部,对包含搬运机的第1物流机构进行控制使其将物品搬运至所述物品的收件地;及
[0550]
管理部,管理第1时刻、或从所述第1时刻起算的经过时间即第1经过时间,所述第1时刻是比收取由所述搬运机搬运的所述物品的收取时刻早的时刻,且是人接触所述物品的最后时刻。
[0551]
(附记18)
[0552]
一种方法,其特征在于:
[0553]
具有管理步骤,
[0554]
所述管理步骤是具备包含将物品搬运至所述物品的收件地的搬运机的第1物流机构的物流系统管理第1时刻、或从所述第1时刻起算的经过时间即第1经过时间,所述第1时刻是比收取由所述搬运机搬运的所述物品的收取时刻早的时刻,且是人接触所述物品的最后时刻。
[0555]
(附记19)
[0556]
一种物流系统,其特征在于,具备:
[0557]
获取部,获取第1时刻、或从所述第1时刻起算的经过时间即第1经过时间,所述第1时刻是比收取物品收取时刻早的时刻,且是人接触所述物品的最后时刻;及
[0558]
搬运机,在比获取到的所述第1时刻晚目标经过时间的时刻、或所述第1经过时间成为所述目标经过时间的时刻以后,向所述收件地搬运所述物品。
[0559]
[符号的说明]
[0560]
1:物流系统
[0561]
10:第1物流机构
[0562]
11:第1搬运机
[0563]
12:寄存柜装置
[0564]
19:终端装置
[0565]
20:第2物流机构
[0566]
21:第2搬运机
[0567]
22:保管库
[0568]
100:信息处理装置
[0569]
101,191,219a:cpu
[0570]
102,192,219b:ram
[0571]
103a,193a,219c:rom
[0572]
103b,193b,219d:闪速存储器
[0573]
104a:第1数据通信电路
[0574]
104b:第2数据通信电路
[0575]
105a,195a,219f:视频卡
[0576]
105b,195b,219g:显示装置
[0577]
105c,195c,219h:输入装置
[0578]
110:控制部
[0579]
120:获取部
[0580]
130:管理部
[0581]
140:通知部
[0582]
150:推导部
[0583]
160:决定部
[0584]
190:信息存储部
[0585]
196,219i:位置计测电路
[0586]
199a:扬声器
[0587]
199b:麦克风
[0588]
194a,219e:数据通信电路
[0589]
194b:声音通信电路
[0590]
211,212:车轮
[0591]
213:底盘
[0592]
214,940:储存库
[0593]
215,225:储存箱
[0594]
215a:门
[0595]
215b:门框
[0596]
215c:死螺栓
[0597]
215d:闩销
[0598]
216,951:lidar传感器
[0599]
217,218b,961:拍摄装置
[0600]
218:机械臂
[0601]
218a:夹钳
[0602]
218c:臂
[0603]
219,229,910:控制装置
[0604]
219j:输入输出端
[0605]
219k:驱动电路
[0606]
921至924:螺旋桨臂
[0607]
931至934:螺旋桨
[0608]
943:支撑脚
[0609]
ln:局域网络
[0610]
in:因特网。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1