液压推定装置以及存储介质的制作方法
1.本发明涉及液压推定装置以及存储介质。
背景技术:
2.日本特开2010-156359所公开的车辆具有内燃机、变矩器以及自动变速器。内燃机的输出轴与变矩器的输入轴连结。变矩器在输入轴与输出轴之间经由流体传递转矩。变矩器的输出轴与自动变速器的输入轴连结。
3.变矩器具有锁止离合器。锁止离合器切换为将变矩器的输入轴与输出轴以机械的方式直接连结的卡合状态或者将该连结解除了的释放状态。锁止离合器根据液压进行动作。
4.车辆具有控制装置。控制装置通过对液压进行控制,对锁止离合器的状态进行切换。
技术实现要素:
5.在如对锁止离合器涉及的液压进行控制的日本特开2010-156359那样的技术中,可能会在液压的指示值和实际的液压之间产生偏差。因此,在精度良好地对液压进行控制方面,需要精度良好地推定实际的液压,并考虑液压的推定值与液压的指示值的偏差来对液压进行控制。在精度良好地推定实际的液压方面,需要掌握液压的指示值与实际的液压的相关性,使液压的推定反映该相关性。为此,需要导出表示了液压的指示值与实际的液压的相关性的关系式等。但是,那样的关系式非常复杂,为了导出而需要花费工夫。
6.本发明的第1技术方案涉及液压推定装置,将具有两个油室和根据所述两个油室间的压力差切换为卡合状态或者释放状态的锁止离合器的变矩器作为模拟对象,基于指示压力差来计算推定压力差,所述指示压力差是对所述变矩器的所述压力差的指示值,所述推定压力差是在所述变矩器中产生的所述压力差的推定值。该液压推定装置包括存储装置和执行装置。所述存储装置构成为存储映射数据(日文:写像
データ
),所述映射数据是规定通过被输入输入变量来输出推定压力差变量作为输出变量、且已通过机器学习进行过学习的映射(日文:写像)的数据,所述推定压力差变量是表示所述推定压力差的变量。在此,所述映射包括指示压力差变量来作为多个所述输入变量之一,所述指示压力差变量是表示所述指示压力差的变量。所述执行装置构成为执行取得处理和计算处理,所述取得处理取得所述输入变量的值,所述计算处理将通过所述取得处理取得的所述输入变量的值输入到所述映射,由此计算所述输出变量的值。
7.根据上述第1技术方案的液压推定装置,在将映射利用于计算推定压力差的情况下,使用适当的数据来使映射进行学习以使得能够适当地计算推定压力差即可。因此,在使指示压力差与实际的压力差的相关性反映于推定压力差的计算上,不需要如导出复杂的关系式的情况那样的工夫。
8.在上述第1技术方案的液压推定装置中,所述存储装置和所述执行装置也可以设
置于搭载有所述变矩器的车辆。所述存储装置也可以构成为存储将从所述锁止离合器开始切换为卡合状态起到开始切换为释放状态为止的期间分割为多个而得到的各阶段(日文:
フェーズ
)的多个映射。所述执行装置也可以构成为执行所述取得处理、选择处理以及所述计算处理。所述取得处理也可以在对所述变矩器输出了所述指示压力差时,取得所述输入变量的值。所述选择处理也可以从所述各阶段的多个所述映射中选择与输出了所述指示压力差时的所述阶段相应的所述映射。所述计算处理也可以通过向在所述选择处理中选择的所述映射输入通过所述取得处理取得的所述输入变量的值,计算所述输出变量的值。
9.根据上述结构的液压推定装置,在各阶段分别利用专用的映射,因此,即使指示压力差与推定压力差的相关性按各阶段而不同,也能够使输出变量反映其差异。
10.在上述结构的液压推定装置中,作为多个所述输入变量之一,也可以包括加速度变量,所述加速度变量是表示所述车辆的加速度的变量。根据上述结构的液压推定装置,即使是在指示压力差与推定压力差的相关性在车辆的加速中和减速中不同的情况下,也能够得到与其差异相应的准确的输出变量。
11.在上述结构的液压推定装置中,作为多个所述输入变量之一,也可以包括加速器变量,所述加速器变量是表示所述车辆的加速踏板的操作量的变量。根据上述结构的液压推定装置,通过输入变量之一包括加速器变量,能够得到与施加于变矩器的转矩相应的输出变量。
12.在上述结构的液压推定装置中,作为多个所述输入变量之一,也可以包括车速变量,所述车速变量是表示所述车辆的行驶速度的变量。根据上述结构的液压推定装置,即使是在指示压力差与推定压力差的相关性存在与车辆的行驶速度相应的差异的情况下,也能够得到准确的输出变量。
13.在上述结构的液压推定装置中,作为多个所述输入变量之一,也可以包括变速变量,所述变速变量是表示所述车辆的变速器的变速比的变量。根据上述结构的液压推定装置,即使是在指示压力差与推定压力差的相关性存在与变速器的变速比相应的差异的情况下,也能够得到准确的输出变量。
14.在上述结构的液压推定装置中,作为多个所述输入变量之一,也可以包括油温变量,所述油温变量是表示向所述变矩器供给的工作油的温度的变量。根据上述结构的液压推定装置,能够得到与可能对推定压力差产生影响的工作油的温度相应的输出变量。
15.本发明的第2技术方案是非暂时性存储介质,其保存能够由液压推定装置的执行装置所包括的一个或者多个处理器执行、并且使所述一个或者多个处理器执行以下功能的命令。所述功能包括:取得处理,取得输入变量的值;和计算处理,将通过该取得处理取得的所述输入变量的值输入到映射,由此计算输出变量的值。并且,所述液压推定装置将具有两个油室和根据所述两个油室间的压力差切换为卡合状态或者释放状态的锁止离合器的变矩器作为模拟对象,具有存储装置和所述执行装置。所述存储装置存储映射数据,所述映射数据是规定通过被输入输入变量来输出推定压力差变量作为所述输出变量、且已通过机器学习进行过学习的映射的数据,所述推定压力差变量是表示推定压力差的变量,所述推定压力差是在所述变矩器中产生的所述压力差的推定值。在此,所述映射包括指示压力差变量来作为多个所述输入变量之一,所述指示压力差变量是表示指示压力差的变量,所述指示压力差是对所述变矩器的所述压力差的指示值。
16.根据上述第2技术方案的存储介质,在将映射利用于计算推定压力差的情况下,使用适当的数据来使映射进行学习以使得能够适当地计算推定压力差即可。因此,在使指示压力差与实际的压力差的相关性反映于推定压力差的计算上,不需要如导出复杂的关系式的情况那样的工夫。
附图说明
17.下文将参照附图说明本发明示例性实施例的特征、优点以及技术和产业的意义,其中相同的标号表示同样的要素,并且,其中:
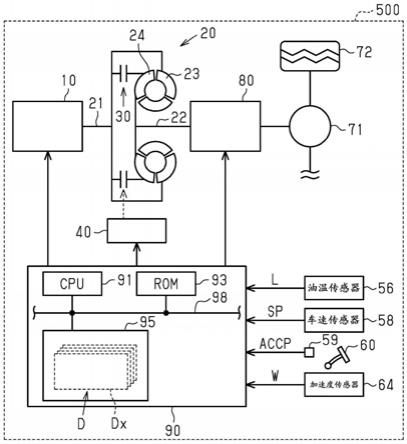
18.图1是搭载了本发明的实施方式的车辆的概略结构图。
19.图2是图1所示的变矩器的概略结构图。
20.图3是表示图1所示的锁止映射的例子的图。
21.图4是表示图1所示的控制装置所执行的卡合用处理中的指示压力差的历时变化的例子的图。
22.图5是表示了所述控制装置所执行的压力差推定处理的处理步骤的流程图。
23.图6是表示了所述实施方式的液压推定装置的变形例的概略图。
具体实施方式
24.以下,参照附图对应用于车辆的液压推定装置的一个实施方式进行说明。
25.首先,对车辆的概略结构进行说明。如图1所示,车辆500具有内燃机10、变矩器20、自动变速器80、差速器71以及驱动轮72。内燃机10为车辆500的驱动源。作为内燃机10的输出轴的曲轴与变矩器20的输入轴21连结。变矩器20是具有转矩放大功能的液力耦合器。变矩器20的输出轴22与自动变速器80的输入轴连结。自动变速器80是多级式的变速器。自动变速器80的输出轴经由差速器71与驱动轮72连结。差速器71容许在左右的驱动轮72产生转速差。
26.变矩器20具有泵叶轮23和涡轮(turbine runner)24。详细而言,泵叶轮23与变矩器20的输入轴21连结。泵叶轮23与输入轴21一体地旋转。涡轮24位于与泵叶轮23相向的部位。涡轮24与变矩器20的输出轴22连结。涡轮24与输出轴22一体地旋转。在变矩器20中,在泵叶轮23与涡轮24之间经由流体进行转矩传递。
27.如图2所示,变矩器20具有锁止离合器30。锁止离合器30是多板式的离合器。即,锁止离合器30具有多个第1摩擦板32、多个第2摩擦板34。在本实施方式中,第1摩擦板32和第2摩擦板34分别具有两片。此外,在图2中仅示出了一个第1摩擦板32。第1摩擦板32和第2摩擦板34交替地配置。相邻的第1摩擦板32和第2摩擦板34相向。第1摩擦板32和第2摩擦板34能够在它们的排列方向上进行移动。第1摩擦板32与泵叶轮23一体地旋转。另外,第2摩擦板34与涡轮24一体地旋转。此外,由多个第1摩擦板32和多个第2摩擦板34构成的一组摩擦板称为摩擦板组。
28.变矩器20具有前罩20a和活塞37。前罩20a在第1摩擦板32和第2摩擦板34的排列方向上位于摩擦板组的一侧。前罩20a构成变矩器20的外壳的一部分。另外,活塞37在第1摩擦板32和第2摩擦板34的排列方向上位于摩擦板组的另一侧。活塞37能够在第1摩擦板32和第2摩擦板34的排列方向上移动。当活塞37接近前罩20a时,会在活塞37与前罩20a之间夹入摩
擦板组。在该情况下,相邻的第1摩擦板32和第2摩擦板34相互接触。当活塞37从前罩20a远离时,在活塞37与前罩20a之间夹入了摩擦板组的状态被解除。在该情况下,相邻的第1摩擦板32和第2摩擦板34配置在相互分离的位置。
29.变矩器20具有控制油室25、前侧油室26以及后侧油室27。具体而言,在变矩器20中,在摩擦板组的附近划分出控制油室25。控制油室25与控制端口25a连接。控制油室25经由控制端口25a接受工作油的供给。另外,控制油室25的工作油经由控制端口25a被排出到外部。
30.在控制油室25的附近划分出前侧油室26。前侧油室26与供给端口26a连接。前侧油室26经由供给端口26a接受工作油的供给。另外,在变矩器20划分出后侧油室27。后侧油室27与前侧油室26连通。后侧油室27与排出端口27a连接。后侧油室27的工作油经由排出端口被排出到外部。
31.前侧油室26在第1摩擦板32和第2摩擦板34的排列方向上与控制油室25相邻。活塞37的一部分延伸到前侧油室26与控制油室25之间。前侧油室26在第1摩擦板32和第2摩擦板34的排列方向上位于比活塞37靠前罩20a侧的位置。此外,虽省略详细的图示,但活塞37将前侧油室26和控制油室25分隔。因此,活塞37根据前侧油室26与控制油室25的压力差,在第1摩擦板32和第2摩擦板34的排列方向上动作。
32.通过活塞37根据前侧油室26与控制油室25的压力差进行动作,锁止离合器30的工作状态进行切换。此外,在以下将从控制油室25中的工作油的压力(以下记为液压)pc减去前侧油室26的液压pf而得到的值称为锁止压力差δp。在本实施方式中,在锁止压力差δp为负的情况下,即在控制油室25的液压pc比前侧油室26的液压pf小的情况下,活塞37从前罩20a远离。在该情况下,相邻的第1摩擦板32和第2摩擦板34配置在相互分离的位置。即,锁止离合器30的工作状态成为释放状态。由于相邻的第1摩擦板32和第2摩擦板34分离,因此,泵叶轮23和涡轮24成为非直接连结状态。
33.另一方面,在锁止压力差δp为零以上的情况下,即在控制油室25的液压pc为前侧油室26的液压pf以上的情况下,活塞37接近前罩20a。并且,相邻的第1摩擦板32和第2摩擦板34相互接触。即,锁止离合器30的工作状态成为卡合状态。由于相邻的第1摩擦板32和第2摩擦板34接触,因此,泵叶轮23和涡轮24成为机械地直接连结的状态。
34.此外,锁止离合器30的工作状态为卡合状态的情况下的形态具有半卡合状态和完全卡合状态这两个状态。在锁止压力差δp相应地小的情况下,锁止离合器30的工作状态成为半卡合状态。在该情况下,相邻的第1摩擦板32和第2摩擦板34成为相互产生滑动的打滑状态。另外,当锁止压力差δp成为所容许的最大值等变得相当大时,锁止离合器30的工作状态成为完全合状态。在该情况下,相邻的第1摩擦板32和第2摩擦板34不产生滑动。
35.根据上述的锁止离合器30的各工作状态,通过变矩器20进行的转矩传递的形态会进行切换。在锁止离合器30处于释放状态的情况下,经由锁止离合器30的转矩传递量成为零。并且,变矩器20通过经由流体的泵叶轮23与涡轮24之间的转矩传递,进行从输入轴21向输出轴22的转矩传递。在锁止离合器30处于半卡合状态的情况下,根据第1摩擦板32和第2摩擦板34的打滑的程度,转矩传递的效率不同。打滑量越小,泵叶轮23的转速与涡轮24的转速之差越小,从输入轴21向输出轴22的转矩传递的效率越提高。在锁止离合器30处于完全卡合状态的情况下,泵叶轮23与涡轮24一体地旋转。由此,大致没有损失地从输入轴21向输
出轴22进行转矩传递。
36.车辆500具有液压回路40。液压回路40是供工作油流通的流路。液压回路40与控制端口25a、供给端口26a以及排出端口27a连接。在液压回路40的中途具有多个电磁阀42。通过这些电磁阀42的开关,对控制油室25、前侧油室26以及后侧油室27进行工作油的给排。
37.如图1所示,在车辆500搭载有车速传感器58、加速器传感器59、加速度传感器64以及油温传感器56。另外,在车辆500搭载有加速踏板60。车速传感器58对作为车辆500的行驶速度的车速sp进行检测。加速器传感器59对加速器操作量accp进行检测,该加速器操作量accp是驾驶员操作的加速踏板60的操作量。加速度传感器64对前后加速度w进行检测,该前后加速度w是车辆500的前后方向上的加速度。油温传感器56对油温l进行检测,该油温l是在液压回路40中流通的工作油的温度。
38.接着,对车辆的控制结构的概要进行说明。车辆500具有控制装置90。控制装置90可以作为按照计算机程序(软件)来执行各种处理的一个以上的处理器来构成。此外,控制装置90也可以作为执行各种处理中的至少一部分处理的、面向特定用途的集成电路(asic)等一个以上专用硬件电路、或者包括它们的组合的电路(circuitry)来构成。处理器包括cpu91以及ram和rom93等存储器。存储器保存构成为使cpu91执行处理的程序代码或者指令。存储器、即计算机可读介质包括能够由通用或者专用的计算机访问的所有能够利用的介质。另外,控制装置90具有存储装置95,该存储装置95是能够电重写的非易失性存储器。cpu91、rom93以及存储装置95能够相互通过内部总线98进行通信。
39.来自安装于车辆500的各种传感器的检测信号被输入到控制装置90。具体而言,关于如下各参数的检测信号被输入到控制装置90。
40.车速传感器58检测的车速sp
41.加速器传感器59检测的加速器操作量accp
42.加速度传感器64检测的前后加速度w
43.油温传感器56检测的油温l
44.cpu91通过执行rom93所存储的各种程序来对内燃机10和自动变速器80等进行控制。具体而言,cpu91基于加速器操作量accp和车速sp,计算内燃机10的目标转矩。并且,cpu91对内燃机10进行控制以使得内燃机10的输出转矩成为目标转矩。另外,cpu91基于加速器操作量accp和车速sp,计算自动变速器80的目标变速级sft。并且,cpu91对自动变速器80进行控制以使得自动变速器80的变速级成为目标变速级sft。
45.cpu91通过执行rom93所存储的程序来对锁止离合器30进行控制。cpu91在对锁止离合器30进行控制方面,执行目标决定处理、卡合用处理、阶段确定处理。以下,依次对这些处理进行说明。
46.接着,对目标决定处理进行说明。cpu91在车辆500行驶期间中反复进行目标决定处理。目标决定处理是决定锁止离合器30的目标工作状态的处理。cpu91在目标决定处理中基于加速器操作量accp、车速sp、目标变速级sft以及车辆500的加速状态,决定锁止离合器的目标工作状态。那时,cpu91对rom93所存储的锁止映射进行参照。
47.如图3所示,锁止映射(日文:
ロックアップマップ
)是按由车速sp和加速器操作量accp规定的车辆500的各运转区域决定了目标工作状态的映射(日文:
マップ
)。锁止映射按目标变速级sft来准备。在各锁止映射中,概略而言,释放状态设定在加速器操作量accp大
的运转区域。在加速器操作量accp小的运转区域中,释放状态设定在低车速侧,完全卡合状态设定在高车速侧。并且,半卡合状态设定在释放状态与完全卡合状态之间且加速器操作量accp比零大的运转区域。另外,如由图3的粗实线所示,半卡合状态也被设定在加速器操作量accp为零的运转区域。即,设定有在车辆500减速期间中使锁止离合器的工作状态为半卡合状态的运转区域。
48.cpu91在决定锁止离合器30的目标工作状态时,选择与最新的目标变速级sft相应的锁止映射。并且,cpu91在所选择的锁止映射中,决定与最新的加速器操作量accp和车速sp对应的目标工作状态。
49.接着,对卡合用处理进行说明。当在上述的目标决定处理中锁止离合器30的目标工作状态从释放状态切换为卡合状态的情况下,cpu91执行卡合用处理。卡合用处理是用于将锁止离合器30的工作状态切换为卡合状态、并且将锁止离合器30的工作状态维持为卡合状态的处理。cpu91在卡合用处理中反复计算指示压力差δpg,该指示压力差δpg是对变矩器20的锁止压力差δp的指示值。当计算指示压力差δpg时,cpu91向液压回路40输出基于指示压力差δpg的控制信号。根据该控制信号,液压回路40的各电磁阀42进行动作,对于控制油室25、前侧油室26以及后侧油室27进行工作油的给排。即,cpu91通过控制信号来输出对变矩器20的指示压力差δpg,由此,对于变矩器20的各油室进行工作油的给排。
50.cpu91在卡合用处理中使指示压力差δpg如下这样变化。以下,与使指示压力差δpg变化的方式对应地说明锁止离合器30伴随着卡合用处理的动作。
51.如图4所示,当在时间t1开始卡合用处理时,cpu91使对变矩器的指示压力差δpg从在释放状态下所设定的值p0急速增加至应用压力差(application differential pressure)p1。并且,cpu91将指示压力差δpg维持为应用压力差p1,直到从开始卡合用处理起经过预先确定的第1期间为止。在该期间,开始锁止离合器30的压紧(日文:
パック
詰
め
)。即,开始缩小相邻的第1摩擦板32和第2摩擦板34的间隔。应用压力差p1是作为使压紧得以开始所需要的锁止压力差δp而预先确定的。此外,cpu91开始卡合用处理的正时是锁止离合器30开始从释放状态切换为卡合状态的正时。
52.cpu91在从时间t1经过了第1期间之后的时间t2,使指示压力差δpg降低为待机压力差p2。并且,cpu91将指示压力差δpg维持为待机压力差p2,直到从使指示压力差δpg降低为待机压力差p2起经过预先确定的第2期间为止。在该期间,锁止离合器30的压紧完成。待机压力差p2是作为相邻的第1摩擦板32和第2摩擦板34即将接触之前的锁止压力差δp而预先确定的。
53.当成为从时间t2经过了第2期间之后的时间t3时,cpu91结束将指示压力差δpg维持为待机压力差p2。cpu91在从时间t3起经过预先确定的第3期间之前,使指示压力差δpg以压力差变化率α持续上升。在该期间,锁止离合器30的打滑量逐渐变小。此外,cpu91在经过了上述第2期间的时刻,基于加速器操作量accp、车速sp、目标变速级sft、油温l以及车辆500的前后加速度w,计算最终目标压力差p3。最终目标压力差p3为实现作为目标工作状态所规定的卡合状态、即完全卡合状态、或者某打滑量下的半卡合状态所需要的锁止压力差δp。当计算最终目标压力差p3时,cpu91将从最终目标压力差p3减去待机压力差p2而得到的值除以第3期间,计算其值来作为压力差变化率α。即,压力差变化率α为用于在第3期间的期间使指示压力差δpg达到最终目标压力差p3的每单位时间的指示压力差δpg的变化率。
cpu91基于该压力差变化率α,使指示压力差δpg持续上升。
54.当成为从时间t3经过了上述第3期间之后的时间t4时,cpu91结束使指示压力差δpg上升。并且,cpu91在从时间t4起到锁止离合器30的目标工作状态从卡合状态切换为释放状态之前,将指示压力差δpg维持为最终目标压力差p3。锁止离合器30随之被维持为完全卡合状态、或者某打滑量下的半卡合状态。
55.此外,当锁止离合器30的目标工作状态从卡合状态切换为释放状态时,cpu91结束卡合用处理。之后,cpu91作为用于将锁止离合器30的工作状态切换为释放状态的处理,开始使指示压力差δpg降低的处理。即,cpu91结束卡合用处理的正时是锁止离合器30开始从卡合状态切换为释放状态的正时。
56.接着,对阶段确定处理进行说明。cpu91在卡合用处理的执行过程中,反复进行阶段确定处理。阶段确定处理是如下处理:确定将卡合用处理的执行过程分割为多个而得到的阶段,计算与所确定的阶段相应的阶段变量phs。阶段变量phs是用于确定卡合用处理的各阶段的变量。
57.在本实施方式中,cpu91确定4个阶段。如图4所示,第1阶段q1是在卡合用处理的一系列过程中将指示压力差δpg维持为应用压力差p1的从时间t1到时间t2为止的阶段。第2阶段q2是将指示压力差δpg维持为待机压力差p2的从时间t2到时间t3为止的阶段。第3阶段q3是使指示压力差δpg以压力差变化率α上升的从时间t3到时间t4为止的阶段。第4阶段q4是将指示压力差δpg维持为最终目标压力差p3的时间t4以后的阶段。cpu参照在卡合用处理中执行的处理内容,确定卡合用处理中的阶段。
58.当确定阶段时,cpu91计算阶段变量phs。在本实施方式中,阶段变量phs作为对各阶段进行识别的正整数来确定,例如,若为第1阶段q1则为“1”,若为第2阶段q2则为“2”。cpu91计算与所确定的阶段相应的值来作为阶段变量phs。
59.接着,对推定压力差的计算涉及的控制结构进行说明。控制装置90作为计算推定压力差δps的液压推定装置发挥功能,该推定压力差δps是在变矩器20中实际产生的锁止压力差δp的推定值。即,控制装置90将变矩器20作为模拟对象,对该变矩器20的实际的锁止压力差δp进行模拟。
60.如图1所示,存储装置95存储映射数据d。映射数据d是规定映射dx的数据,该映射dx通过被输入输入变量而将输出变量输出。在本实施方式中,输入变量是作为表示指示压力差δpg的变量的指示压力差变量、作为表示前后加速度w的变量的加速度变量、作为表示加速器操作量accp的变量的加速器变量、作为表示车速sp的变量的车速变量、作为表示自动变速器80的变速比的变量的变速变量、以及作为表示油温l的变量的油温变量。输出变量是作为表示推定压力差δps的变量的推定压力差变量。
61.存储装置95所存储的映射数据d包括卡合用处理的各阶段的映射dx。即,存储装置95与将卡合用处理的行进过程分割为4个而得到的第1阶段q1~第4阶段q4对应地存储了4个映射dx。
62.cpu91能够执行压力差推定处理,该压力差推定处理是在卡合用处理的执行过程中计算推定压力差δps的处理。cpu91通过执行存储于rom93的程序来实现压力差推定处理的各处理。在本实施方式中,cpu91和rom93构成执行装置。
63.cpu91在压力差推定处理中进行取得处理、选择处理以及计算处理。cpu91在取得
处理中,取得在计算指示压力差δpg等推定压力差δps上所需要的各种输入变量。此外,cpu91在后台正在执行的卡合用处理中输出了对变矩器20的指示压力差δpg时、即输出了对于液压回路40的控制信号时,取得各种输入变量。cpu91在选择处理中,从存储装置95所存储的各阶段的映射dx中选择与输出了指示压力差δpg时的阶段相应的映射dx。cpu91在计算处理中,通过向在选择处理中选择出的映射dx输入在取得处理中取得的输入变量的值,从而计算输出变量的值。
64.接着,对压力差推定处理进行说明。cpu91在卡合用处理的执行过程中,反复进行压力差推定处理。如图5所示,当开始压力差推定处理时,cpu91执行步骤s10的处理。在步骤s10中,cpu91取得步骤s20以后的处理中所需要的各种变量。具体而言,cpu91取得阶段变量phs、指示压力差δpg、加速度识别值wd、加速器操作量accp、车速sp、目标变速级sft以及油温l。
65.cpu91关于阶段变量phs,取得在阶段确定处理中计算出的最新的值。cpu91关于指示压力差δpg,取得在卡合用处理中计算出的最新的值。此外,指示压力差δpg是上述指示压力差变量。cpu91关于加速器操作量accp,取得从加速器传感器59输入到控制装置90的最新的值。此外,加速器操作量accp是上述加速器操作量变量。cpu91关于车速sp,取得从车速传感器58输入到控制装置90的最新的值。cpu91关于目标变速级sft,取得在对自动变速器80进行控制上所计算出的最新的值。此外,目标变速级sft是上述变速变量。cpu91关于油温l,取得从油温传感器56输入到控制装置90的最新的值。此外,油温l是上述油温变量。
66.加速度识别值wd是用于对车辆500是处于加速中、还是处于减速中进行识别的识别值。在本实施方式中,加速度识别值wd在车辆500处于加速中的情况下被确定为“1”,在车辆500处于减速中的情况下被确定为“2”,在车辆500处于定速行驶中的情况下被确定为“3”。cpu91在步骤s10中取得从加速度传感器64输入到控制装置90的最新的值。cpu91在前后加速度w为正值的情况下、即车辆500处于加速中的情况下,将加速度识别值wd计算为“1”。另一方面,cpu91在前后加速度w为负值的情况下、即车辆500处于减速中的情况下,将加速度识别值wd计算为“2”。cpu91在前后加速度w为零的情况下、即车辆500处于定速行驶中的情况下,将加速度识别值wd计算为“3”。cpu91计算加速度识别值wd相当于cpu91取得加速度识别值wd。此外,加速度识别值wd为上述加速度变量。
67.当取得各种变量后,cpu91使处理进入步骤s20。此外,步骤s10的处理是取得处理。在步骤s20中,cpu91基于阶段变量phs,选择用于利用于计算推定压力差δps的映射dx。存储装置95存储有将阶段变量phs与各阶段的映射dx相关联的选择映射。cpu91参照选择映射,从存储装置95所存储的各阶段的映射dx中选择与在步骤s10中取得的阶段变量phs对应的阶段的映射dx。当选择映射dx时,cpu91使处理进入步骤s30。此外,步骤s20的处理是选择处理。
68.在步骤s30中,cpu91作为计算推定压力差δps的前处理,将在步骤s10的处理中取得的各种变量的值代入到用于输入给映射的输入变量x(1)~x(6)。具体而言,cpu91将指示压力差δpg代入到输入变量x(1)。cpu91将加速度识别值wd代入到输入变量x(2)。cpu91将加速器操作量accp代入到输入变量x(3)。cpu91将车速sp代入到输入变量x(4)。cpu91将目标变速级sft代入到输入变量(5)。cpu91将油温l代入到输入变量x(6)。之后,cpu91使处理进入步骤s40。
69.在步骤s40中,cpu91通过向在步骤s20中选择出的映射dx输入输入变量x(1)~x(6),从而计算输出变量y。输出变量y为推定压力差δps。
70.映射dx作为中间层为一层的全连接前馈型神经网络(日文:全結合順伝播型
ニューラルネットワーク
)来构成。上述神经网络包括作为输入侧非线性映射的激活函数h(x),该输入侧非线性映射分别对输入侧系数wfjk(j=0~n,k=0~6)和作为由输入侧系数wfjk规定的线性映射的输入侧线性映射的输出进行非线性变换。在本实施方式中,例示双曲正切“tanh(x)”来作为激活函数h(x)。另外,上述神经网络包括作为输出侧非线性映射的激活函数f(x),该输出侧非线性映射分别对输出侧系数wsj(j=0~n)和作为由输出侧系数wsj规定的线性映射的输出侧线性映射的输出进行非线性变换。在本实施方式中,例示双曲正切“tanh(x)”来作为激活函数f(x)。此外,值n表示中间层的维数。输入侧系数wfj0是偏置参数,为输入变量x(0)的系数。输入变量x(0)被定义为“1”。另外,输出侧系数ws0为偏置参数。
71.映射dx是在安装于车辆500以前使用具有搭载于车辆500的内燃机10、变矩器20、自动变速器80、液压回路40等的传动装置进行了机器学习的已学习模型。在映射dx的学习时,事先取得训练数据和教师数据。即,通过将传动装置安装于底盘测功机(chassis dynamometer),对车辆的行驶进行模拟,由此制作训练数据和教师数据。在制作训练数据和教师数据方面,将传动装置的状态设定为各种各样的状态来执行卡合用处理。传动装置的状态由车辆的加速状态、加速器操作量accp、车速sp、变速级以及油温l的组合来规定。车辆的加速状态可以作为车辆是处于加速中、还是处于减速中、或是处于定速行驶中的某一状态来确定。即,关于车辆的加速状态的3个模式,分别对以各种各样的方式组合了其他的上述各参数的值的状况进行模拟来进行卡合用处理,取得各个状况时的实际的锁止压力差(以下记为实际压力差)δpr来作为教师数据。另外,在与取得实际压力差δpr相同的正时,取得成为对映射dx的输入变量的各种变量的值来作为训练数据。此时,各种变量的值是与步骤s10的处理同样地取得的。此外,可以在液压回路40安装液压传感器,基于该液压传感器的检测值来计算该实际压力差δpr。具体而言,检测液压回路40中的与控制端口25a连接的油路的液压,作为控制油室25的液压pc。另外,检测液压回路40中的与供给端口26a连接的油路的液压,作为前侧油室26的液压pf。并且,可以基于这些检测值来计算实际压力差δpr。这样,在取得了传动装置的各状态的训练数据和教师数据之后,使用传动装置的各状态的训练数据和教师数据的组来进行映射dx的学习。即,关于传动装置的各种各样的状态,对输入侧变量和输出侧变量进行调整,以使得将训练数据作为输入而映射dx输出的值与作为实际压力差δpr的教师数据之差成为预定值以下。并且设为:根据上述的差成为预定值以下来完成了学习。此外,映射dx的学习将与该映射dx对应的阶段作为对象来进行。
72.当在步骤s40中计算推定压力差δps来作为输出变量y时,cpu91暂时结束压力差推定处理的一系列处理。并且,cpu91将正在执行卡合用处理作为条件,再次执行步骤s10的处理。此外,步骤s40的处理为计算处理。
73.接着,对实施方式的作用进行说明。cpu91在卡合用处理的执行过程中,利用映射数据d来计算变矩器20的推定压力差δps。那时,cpu91对与卡合用处理的各阶段对应的映射dx进行选择,向所选择的映射dx输入各种输入变量来计算推定压力差δps。
74.接着,对实施方式的效果进行说明。
75.(1)如图4的双点划线所示,变矩器20中的实际压力差δpr可能相对于指示压力差
δpg有偏差。例如,实际压力差δpr相对于指示压力差δpg延迟开始变化,或者相对于指示压力差δpg的急速变化而缓慢地变化。依据这样的缘故,在准确地计算推定压力差δps方面,需要使指示压力差δpg与实际压力差δpr的相关性适当地反映于推定压力差δps的计算。
76.在使指示压力差δpg与实际压力差δpr的相关性反映于推定压力差δps的计算方面,可考虑导出表示了指示压力差δpg与实际压力差δpr的相关性的关系式,并利用于推定压力差δps的计算。但是,当要导出与车辆500的各种各样的行驶状态相适的一个关系式时,该关系式的内容变得非常地复杂或在精度上有欠缺,因此,难以导出那样的关系式。另一方面,即使要按车辆500的行驶状态来导出上述的关系式,也必须按车辆500的行驶状态来对指示压力差δpg与实际压力差δpr的相关性逐一进行分析,导出与各自相适的关系式,会花费工夫。
77.关于这一点,在如本实施方式这样利用映射dx来计算推定压力差δps的情况下,只要能够准备适当的训练数据和教师数据,则不需要如导出复杂的关系式那样的工夫,就能够使指示压力差δpg与实际压力差δpr的相关性反映于推定压力差δps的计算。并且,在利用映射dx来计算推定压力差δps时,只要作为训练数据和教师数据能够准备某程度的数量,就能够确保推定压力差δps的准确性。进一步,在本实施方式中,不仅采用指示压力差δpg,也采用多个变量来作为输入变量。因此,在计算推定压力差δps方面,能够考虑多个变量与实际压力差δpr的相关性地计算推定压力差δps。因此,能够高精度地计算推定压力差δps。此外,这样计算出的推定压力差δps能够使用于向锁止离合器30的液压供给涉及的控制程序的学习处理、控制程序的修改、其他车辆的锁止离合器的设计等。
78.(2)在本实施方式中,根据卡合用处理的各阶段,指示压力差δpg的提供方式的特征不同。例如,在第1阶段q1中,使指示压力差δpg急速增加,另一方面,在第2阶段q2中,使指示压力差δpg急速减少。另外,在第3阶段q3中,使指示压力差δpg逐渐增加。与这样的指示压力差δpg的提供方式的各阶段的差异相应地,实际压力差δpr的响应方式也按各阶段而不同。因此,在准确地计算推定压力差δps方面,需要使各阶段的指示压力差δpg与实际压力差δpr的相关性反映于各个阶段的推定压力差δps的计算。
79.在本实施方式中,按各阶段使用专用的映射dx,因此,能够使各个阶段的指示压力差δpg与实际压力差δpr的相关性反映于推定压力差δps的计算。因此,各个阶段中的推定压力差δps的计算精度变高。
80.(3)在车辆500的加速中和减速中,作用于变矩器20的转矩的大小不同。在此,假定为:在锁止离合器30的工作状态为卡合状态的情况下,在车辆500的加速中和减速中,在相同的打滑量下进行转矩传递。在车辆500的加速中,内燃机10的输出被输入到变矩器20的输入轴21。并且,输出轴22追随于变矩器20的输入轴21地进行旋转。另一方面,在车辆500的减速中,来自内燃机10的输出变小。并且,在变矩器20中,输入轴21追随于输出轴22地进行旋转。在车辆500的减速中在输入轴21和输出轴22之间传递的转矩的大小相比在车辆500的加速中传递的转矩的大小、即与内燃机10的输出相应的转矩的大小,以指令单位(order unit)变小。由于具有这样的差异,因此,即使是在车辆500的加速中和减速中实现相同的打滑量的情况下,所被要求的锁止压力差δp的大小也不同。
81.因此,在车辆500的加速中和减速中,即使锁止离合器的目标工作状态的打滑量相
同,最终目标压力差p3也会不同。并且,随着最终目标压力差p3不同,使指示压力差δpg达到最终目标压力差p3的压力差变化率α等指示压力差δpg的变化方式不同。通过指示压力差δpg的变化方式不同,在车辆500的加速中和减速中,指示压力差δpg与实际压力差δpr的相关性也可能不同。
82.在本实施方式中,对映射dx的输入变量之一包括加速度识别值wd。据此,能够考虑车辆500的加速中和减速中的各自的与指示压力差δpg的变化方式相应的实际压力差δpr的响应特性来计算推定压力差δps。
83.(4)根据加速器操作量accp而被输入到变矩器20的转矩的大小不同。因此,与上述(3)同样地,根据加速器操作量accp,指示压力差δpg的变化方式不同。如本实施方式这样,通过使对映射dx的输入变量之一包括加速器操作量accp,能够考虑与各加速器操作量accp的指示压力差δpg的变化方式相应的实际压力差δpr的响应特性来计算推定压力差δps。
84.(5)在锁止映射中,锁止离合器30的目标工作状态成为完全卡合状态的运转区域相比目标工作状态成为半卡合状态的运转区域,被设定在高车速侧。即,作为锁止离合器30的目标工作状态所规定的打滑量根据车速sp而不同。因此,最终目标压力差p3、以及到达到最终目标压力差p3为止的指示压力差δpg的变化方式根据车速sp而不同。在本实施方式中,通过使对映射dx的输入变量之一包括车速sp,能够考虑与各车速sp的指示压力差δpg的变化方式相应的实际压力差δpr的响应特性来计算推定压力差δps。
85.(6)与车速sp同样地,作为锁止离合器30的目标工作状态所规定的打滑量根据目标变速级sft而不同。因此,指示压力差δpg的变化方式根据目标变速级sft而不同。在本实施方式中,对映射dx的输入变量之一包括目标变速级sft,因此,能够考虑与各目标变速级sft的指示压力差δpg的变化方式相应的实际压力差δpr的响应特性来计算推定压力差δps。
86.(7)油温l越低,工作油的粘性越高。起因于这样的油温l与工作油的粘性的相关性,油温l可能影响到实际压力差δpr对于指示压力差δpg的响应性。如本实施方式这样,通过使输入变量之一包括油温l,能够考虑与油温l相应的实际压力差δpr对于指示压力差δpg的响应性来计算推定压力差δps。
87.接着,对本实施方式的变形例进行说明。本实施方式的变形例如以下这样对所述实施方式进行变更来实施。本实施方式以及以下的变形例能够在技术上不矛盾的范围内相互组合来实施。
88.也可以在车辆500外部的计算机进行压力差推定处理的一部分。例如如图6所示,也可以在车辆500的外部设置服务器600。并且,也可以设为如下结构:在服务器600中进行压力差推定处理中的选择处理和计算处理。在该情况下,服务器600可以作为按照计算机程序(软件)执行各种处理的一个以上的处理器来构成。此外,服务器600也可以作为执行各种处理中的至少一部分处理的、面向特定用途的集成电路(asic)等一个以上的专用硬件电路、或者包括它们的组合的电路(circuitry)来构成。处理器包括cpu602以及ram和rom604等的存储器。存储器保存构成为使cpu602执行处理的程序代码或者指令。存储器、即计算机可读介质包括能够由通用或者专用的计算机访问的所有能够利用的介质。另外,服务器600具有存储装置606,该存储装置606是能够电重写的非易失性存储器。存储装置606存储在上述实施方式中说明过的映射数据d、即各阶段的映射dx。另外,服务器600具有用于通过外部
通信线路网700与服务器600的外部进行连接的通信机610。cpu602、rom604、存储装置606以及通信机610能够互相通过内部总线608进行通信。
89.在由服务器600进行压力差推定处理中的选择处理和计算处理的情况下,车辆500的控制装置90具有用于通过外部通信线路网700与控制装置90的外部进行通信的通信机99。此外,除了具有通信机99之外,控制装置90的结构与上述实施方式的结构是相同的。因此,省略关于控制装置90的详细说明。此外,在图6中,对与图1相同地发挥功能的部位标记与图1相同的标号。控制装置90与服务器600一起构成液压推定装置z。
90.在由服务器600进行压力差推定处理中的选择处理和计算处理的情况下,首先,车辆500的控制装置90进行取得处理,该取得处理是上述实施方式的步骤s10的处理。当通过步骤s10的处理取得各种变量时,控制装置90向服务器600发送所取得的各种变量的值。当接收各种变量的值时,服务器600的cpu602通过进行上述实施方式的步骤s20、步骤s30以及步骤s40的处理,计算推定压力差δps。服务器600的cpu602通过执行rom604存储的程序,进行步骤s20、步骤s30以及步骤s40的处理。
91.如该变形例这样,在由车辆500的控制装置90和服务器600进行压力差推定处理的情况下,车辆500的控制装置90的cpu91以及rom93和服务器600的cpu602以及rom604构成执行装置。
92.也可以在车辆500的外部进行压力差推定处理的全部处理。例如如上述变形例那样,在车辆500的外部设置服务器600的情况下,车辆500的控制装置90向服务器600发送安装于车辆500的各种传感器的检测信号。另外,车辆500的控制装置90关于阶段变量phs和目标变速级sft这样的在压力差推定处理中利用的其他变量,也发送给服务器600。并且,服务器600的cpu602通过进行与上述实施方式的步骤s10相当的处理,取得各种变量的值。之后,与上述变形例同样地,服务器600的cpu602进行与步骤s20、步骤s30以及步骤s40相当的处理。在这样的结构中,在服务器600中进行取得处理、选择处理以及计算处理。
93.当在车辆500的外部进行压力差推定处理的情况下,也可以与在卡合用处理中输出指示压力差δpg的正时无关地进行压力差推定处理。即,也可以不是与卡合用处理的执行相对应地进行压力差推定处理,而是由其单独执行压力差推定处理。例如,若预先制作推定压力差δps的计算所需要的各种变量的时间序列数据,则能够与卡合用处理无关地仅进行压力差推定处理来计算推定压力差δps。
94.在上述实施方式中,也可以在卡合用处理的各阶段中使用相同的映射dx来计算推定压力差δps。在卡合用处理的各阶段中,实际压力差δpr相对于指示压力差δpg的延迟等行为被推测为大致相似。因此,即使在各阶段中使用相同的映射dx,关于推定压力差δps也能够期待某种程度的准确性。
95.也可以在将锁止离合器30的工作状态从卡合状态切换为释放状态时,计算推定压力差δps。在该情况下,既可以利用将锁止离合器30的工作状态切换为释放状态的情况专用的映射dx,也可以利用与将锁止离合器30的工作状态切换为卡合状态的情况相同的映射dx。另外,也可以利用将如下期间分割为多个阶段而得到的各阶段的映射dx,该期间是将锁止离合器30的工作状态切换为释放状态的期间。
96.阶段确定处理中的阶段的确定方式不限定于上述实施方式的例子。例如也可以在确定第3阶段q3的结束正时之际,利用从变矩器20的输入轴21的转速减去输出轴22的转速
而得到的值即转速差。具体而言,也可以确定转速差达到了由目标工作状态规定的值的正时来作为第3阶段q3的结束正时。在该情况下,可以在车辆500设置对内燃机10的曲轴的旋转角进行检测的曲轴角传感器,将基于该传感器的检测值的曲轴的转速作为输入轴21的转速。另外,可以在车辆500设置对自动变速器80的输入轴的旋转角进行检测的旋转角传感器,将基于该传感器的检测值的自动变速器80的输入轴的转速作为变矩器20的输出轴22的转速。
97.卡合用处理中的阶段的分割方式不限定于上述实施方式的例子。例如,也可以把将指示压力差δpg维持为应用压力差p1的阶段和将指示压力差δpg维持为待机压力差p2的阶段合并作为一个阶段。可以在对阶段的分割方式进行变更的情况下,准备变更后的各阶段的映射dx。
98.卡合用处理中的指示压力差δpg的历时变化不限定于上述实施方式的例子。例如,也可以根据车辆500的行驶状态等以可变的方式设定第1期间、第2期间、第3期间。另外,也可以根据车辆500的行驶状态等以可变的方式设定应用压力差p1和待机压力差p2。另外,也可以不是使压力差变化率α在整个第3期间固定,而是使压力差变化率α在第3期间的中途变化。卡合用处理中的指示压力差δpg的历时变化在将锁止离合器30切换为卡合状态上为适当的历时变化即可。在根据上述实施方式的内容对指示压力差δpg的历时变化进行变更的情况下,可以与该变更相对应地适当确定阶段的分割方式以及阶段的确定方式。
99.如在实施方式的效果一栏所记载的那样,根据车辆500的加速状态,作用于变矩器20的转矩的大小不同。于是,也可以按车辆500的各加速状态来准备映射dx。具体而言,也可以关于车辆500处于加速中的情况、车辆500处于减速中的情况以及车辆500处于定速行驶中的情况,分别准备专用的映射dx。并且,也可以按车辆500的各加速状态,通过专用的映射dx计算推定压力差δps。
100.在步骤s10中取得的加速器操作量accp不限定于执行步骤s10的处理的时刻的最新的值。例如,也可以取得从在前一个的正时执行步骤s10起到接下来执行步骤s10为止的期间的加速器操作量accp的最大值。另外,也可以不是取得瞬时值,而是取得一定期间的加速器操作量accp的平均值。关于车速sp和油温l也是同样的。另外,在同样的观点下,在计算加速度识别值wd时,也可以不是根据前后加速度w的瞬时值来计算该加速度识别值wd,而是基于一定期间的前后加速度w的平均值等来计算该加速度识别值wd。
101.作为指示压力差变量所采用的变量不限定于上述实施方式的例子。例如,也可以采用将指示压力差δpg乘以在准确地计算推定压力差δps上合适的修正系数等而得到的值,作为指示压力差变量。指示压力差变量为表示指示压力差δpg的变量即可。
102.作为加速度变量所采用的变量不限定于上述实施方式的例子。例如,也可以利用从变矩器20的输入轴21的转速减去输出轴22的转速而得到的值即转速差,作为加速度变量。在锁止离合器30为半卡合状态的情况下,在车辆500的加速中,输入轴21的转速比输出轴22的转速高。另一方面,在车辆500的减速中,输出轴22的转速比输入轴21的转速高。因此,在车辆500的加速中和减速中,转速差的符号反转。因此,转速值可以成为表示车辆500的加速状态的指标。如上述变形例所记载的那样,关于输入轴21的转速,可以设为曲轴的转速。关于输出轴22的转速,可以设为自动变速器80的输入轴的转速。加速度变量为表示车辆500的前后加速度w的变量即可。
103.作为加速器操作量变量所采用的变量不限定于上述实施方式的例子。内燃机10的节气门开度与加速器操作量accp具有正的相关。于是,例如也可以采用内燃机10的节气门开度来作为加速器操作量变量。在该情况下,可以在内燃机10设置对节气门开度进行检测的开度传感器。加速器操作量变量可以为表示加速器操作量accp的变量。
104.作为车速变量所采用的变量不限定于上述实施方式的例子。例如,也可以采用自动变速器80的输出轴的转速,作为车速变量。在该情况下,可以在车辆500设置对自动变速器80的输出轴的旋转角进行检测的旋转角传感器,基于该传感器的检测值来计算自动变速器80的输出轴22的转速。车速变量为表示车速sp的变量即可。
105.作为变速变量所采用的变量不限定于上述实施方式的例子。例如,也可以采用自动变速器80的输入轴的转速与输出轴的转速的比率、即实际的变速比,作为变速变量。变速变量为表示变速器的变速比的变量即可。
106.作为油温变量所采用的变量不限于上述实施方式的例子。例如,也可以将油温l分为多个阶段的等级,采用表示那样的等级的值作为油温变量。油温变量为表示油温l的变量即可。
107.与变形例涉及的油温变量同样地,关于其他输入变量也可以根据各自的程度来设定多个等级,采用表示那样的等级的值。输入变量的种类不限定于上述实施方式的例子。输入变量也可以代替上述实施方式所示的变量而采用其他变量、或者在其基础上采用其他变量。另外,也可以从上述实施方式的数量减少输入变量的数量。输入变量的数量可以为两个以上。可以使两个以上的输入变量中的一个包括指示压力差变量。
108.加速度变量、加速器变量、车速变量、变速变量以及油温变量作为输入变量不是必须的。即使不包括这些变量,只要采用包括了指示压力差变量的两个以上的变量来作为输入变量,就能够相应地以高精度计算推定压力差δps。
109.作为输入变量,也可以采用在上述实施方式中所示的变量以外的变量。作为输入变量,例如也可以采用表示液压回路40的随时间劣化的程度的变量。具体而言,表示液压回路40的随时间劣化的程度的变量可以采用车辆500的总行驶距离等。与液压回路40的随时间劣化的程度相应地,实际压力差δpr对于指示压力差δpg的响应性可能变化。因此,若采用表示液压回路40的随时间劣化的程度的变量来作为输入变量之一,则能够考虑液压回路40的随时间劣化的程度来计算推定压力差δps。
110.作为推定液压变量所采用的变量不限定于上述实施方式的例子。例如,也可以采用将锁止压力差δp换算为工作油的流量之差的情况下的该流量之差的推定值,作为推定液压变量。推定液压变量为表示推定压力差δps的变量即可。
111.映射dx的结构不限定于上述实施方式的例子。例如,也可以使神经网络中的中间层的层数为两层以上。
112.作为神经网络,例如也可以采用循环型(日文:回帰結合型)的神经网络。在该情况下,过去的输入变量的值在本次新计算输出变量的值时得到反映,因此,对于反映过去的历史记录来计算推定压力差δps是合适的。
113.在映射dx的学习中利用的训练数据和教师数据的取得方法不限定于上述实施方式的例子。例如,也可以使与车辆500相同规格的车辆实际地行驶来取得训练数据和教师数据。
114.如以下的式(1)所示,也可以使锁止压力差δp为从控制油室25的液压pc减去前侧油室26的液压pf和后侧油室的液压pb的平均值而得到的值。
115.δp=pc- ( (pf+pb)/2) · · · (1)
116.锁止压力差δp表示控制油室25与前侧油室26的压力差即可。
117.车辆500的整体结构不限定于上述实施方式的例子。例如,作为车辆500的驱动源,也可以代替内燃机10而具有电动发电机,或者在内燃机10的基础上而具有电动发电机。作为自动变速器,也可以采用无级变速器。
118.变矩器20与内燃机10和自动变速器80的连结方式不限定于上述实施方式的例子。例如,自动变速器80的输入轴也可以是变矩器20的输出轴22本身。
119.第1摩擦板32和第2摩擦板34的数量不限定于上述实施方式的例子。第1摩擦板32和第2摩擦板34可以分别为1片以上。
120.锁止映射的内容不限定于上述实施方式的例子。锁止映射为能够适当地切换锁止离合器30的工作状态的内容即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1