基于图高斯过程的交通流预测方法、介质及设备
1.本发明属于数字化智慧交通领域,具体涉及一种基于图高斯过程的交通流预测方法、介质及设备。
背景技术:
2.在过去数十年中,我国的汽车保有量连年增长,预计在2022年,该数字将达到3亿辆以上。与此同时,交通需求也与日俱增,使得当前道路交通的负荷日益增加,带来了拥堵、事故等一系列问题。尽管交管部门一定程度上采取措施来缓解交通拥堵,如道路建设,车辆限号等,但交通拥堵状态仍未得到良好改善。
3.交通流预测与控制,是解决交通效率的核心问题,根据预测结果提前做出合理的决策,能够有效的提高交通效率,防止交通拥堵和事故的发生。然而交通流数据既有时间序列特征,又有空间相关特征,对这一类时空耦合数据进行建模具有相当大的挑战性。更进一步的,部份地区因条件有限,布设感知设备困难,因而交通数据的采集相对稀疏匮乏,这更进一步的增加了高效预测算法的设计难度。
4.传统的交通流预测算法将交通流数据视作时间序列数据,并使用相关模型进行拟合。比如,使用auto
‑
regressive integrated moving average(arima)模型、以及卡尔曼滤波算法进行交通流量预测,取得了一定的效果,但其预测精度不能让人满意。近年来随着深度学习技术的发展,基于深度学习技术的交通流预测算法解决方案异彩纷呈,诸如基于深度置信网络、自动编码器、深度卷积神经网络、循环神经网络等方案的交通流预测解决方案都取得了不错的效果,但其空间耦合特性仍然没有得到有效的关注和利用。
5.图结构对于空间结构的有效表达性,启发人们设计图神经网络对时空耦合数据进行建模。基于时空图模型的研究成果在交通流建模预测方面取得了突破进展,其中以文献yu b,yin h,zhu z.spatio
‑
temporal graph convolutional networks:adeep learning framework for traffic forecasting[c]//ijcai.2018所提出的时空图卷积网络方法、文献li y,yu r,shahabi c,et al.diffusion convolutional recurrent neural network:data
‑
driven traffic forecasting[c]//international conference on learning representations.2018.所提出的dcrnn方法、文献wu z,pan s,long g,et al.graph wavenet for deep spatial
‑
temporal graph modeling[c]//ijcai.2019所提出的graph wavenet方法以及文献zhang q,chang j,meng g,et al.spatio
‑
temporal graph structure learning for traffic forecasting[c]//proceedings of the aaai conference on artificial intelligence.2020,34(01):1177
‑
1185所提出的slcnn方法最为典型,其结合图结构、散播过程、卷积神经网络、循环神经网络等方法提取时空特征,在交通流预测问题上取得了相对更好的效果。相近的,授权公告号为cn 110264709 b,名称为“基于图卷积网络的道路的交通流量的预测方法”的发明专利,通过利用gcn网络和lstm网络综合道路的交通流量数据的空间特征和时间特征得到下一时间段的道路的交通流量数据的预测值。授权公告号为cn 110503826 b,名称为“一种基于高速流量监测及预测的智能
诱导”的发明专利,将道路交通流视为时间序列,通过利用acti_arma算法进行拟合,从而实现交通流预测,并结合道路相关设计及管理方案,按照高速诱导信息发布流程进行发布。授权公告号为cn 111540199 b,名称为“基于多模态融合和图注意力机制的高速交通流预测方法”的发明专利,构建时序卷积注意力网络和图注意力机制网络,从而实现对高速公路交通流的预测。然而,这些现存先进交通流预测模型对于图结构的利用较为有限,对时间序列的特征提取也对数据的丰富度、质量要求都比较高,这使得其在数据采集稀疏匮乏区域的应用受到限制,没有预测不确定度输出,没有模型校正方法,因而在现实场景应用中适应能力差。
技术实现要素:
[0006]
本发明的目的在于解决现有技术中存在的问题,并提供一种基于图高斯过程的交通流预测方法、介质及设备,该方法具有数据利用率高,具备预测不确定度输出,且具备模型校正方法,使得其具备相当鲁棒的现实场景应用能力。
[0007]
第一方面,本发明提供了一种基于图高斯过程的道路交通流预测方法,其包括以下步骤:
[0008]
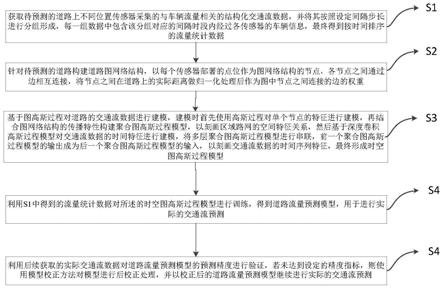
s1、获取待预测的道路上不同位置传感器采集的与车辆流量相关的结构化交通流数据,并将其按照设定间隔步长进行分组形成,每一组数据中包含该分组对应的间隔时段内经过各传感器的车辆信息,最终得到按时间排序的流量统计数据;
[0009]
s2、针对待预测的道路构建道路图网络结构,以每个传感器部署的点位作为图网络结构的节点,各节点之间通过边相互连接,将节点之间在道路上的实际距离做归一化处理后作为图中节点之间连接的边的权重;
[0010]
s3、基于图高斯过程对道路的交通流数据进行建模,建模时首先使用高斯过程对单个节点的特征进行建模,再结合图网络结构的传播特性构建聚合图高斯过程模型,以刻画区域路网的空间特征关系,然后基于深度卷积高斯过程模型对交通流数据的时间特征进行建模,将多层聚合图高斯过程模型进行串联,前一个聚合图高斯过程模型的输出成为后一个聚合图高斯过程模型的输入,以刻画交通流数据的时间序列特征,最终形成时空图高斯过程模型;
[0011]
s4、利用s1中得到的流量统计数据对所述的时空图高斯过程模型进行训练,得到道路流量预测模型,用于进行实际的交通流预测;
[0012]
s5、利用后续获取的实际交通流数据对道路流量预测模型的预测精度进行验证,若未达到设定的精度指标,则使用模型校正方法对模型进行后校正处理,并以校正后的道路流量预测模型继续进行实际的交通流预测。
[0013]
作为优选,所述s1中,传感器采集的结构化交通流数据包括传感器的位置信息、车辆经过时间、车牌号和车辆驾驶方向。
[0014]
作为优选,所述s1中,传感器采集的结构化交通流数据通过pandas工具进行统计处理。
[0015]
作为优选,所述s1中,若结构化交通流数据存在多个车辆驾驶方向的数据,则先以车辆驾驶方向为维度对数据进行提取,然后将每一种车辆驾驶方向的数据分别进行分组和排序,形成的流量统计数据仅用于训练该车辆驾驶方向的时空图高斯过程模型。
[0016]
作为优选,所述s3中,时空图高斯过程模型的骨架结构是一个t层深度卷积高斯过程,代表对于t个连续时间序列的建模,每一层都是一个聚合图高斯过程模型,代表对于地理空间的信息流传播的建模;
[0017]
在聚合图高斯过程模型中,交通流数据的空间特征被构建为一个图网络其中表示图网络中所有n个节点的集合,每个节点代表一个捕获道路交通流信息的传感器,ε表示节点之间相连的边的集合,表示不同传感器之间欧几里得距离归一化处理后构建的邻接矩阵;图网络中,具有m个维度的t步时长的数据流数据表示为x
l
和y
l
分表表示第l个时间步的历史交通流数据和当前交通流数据;模型训练的目标是学习一个映射函数以历史交通流数据d
*
和图网络为输入,预测未来t步时长的交通流数据,即:
[0018][0019]
其中代表了交通流预测结果,ψ代表可学习的参数;
[0020]
所述聚合图高斯过程模型中,单个节点的信息流采用如下的似然隐参表示:
[0021][0022]
其中表示节点i和节点j之间连边的信息流权重,表示节点i的自环信息流权重;表示将一个节点的空间特征建模为高斯过程,其中μ
ψ
(x)为零均值函数,核函数k
ψ
(x,x
′
)为自动相关确定函数;为对角度矩阵中的对角元素,ne(i)代表图网络上节点i的一度邻居节点;
[0023]
所述聚合图高斯过程模型中,任意两个不同节点m和节点n之间的协方差表示为:
[0024][0025]
其中:φ(x
i
)表示核函数k
ψ
(x
i
,
·
)在重生核希尔伯特空间(reproducing kernel hilbert space,rkhs)上的映射;表示重生核希尔伯特空间中的数值内积计算;
[0026]
所述t层深度卷积高斯过程中,第l层节点i的时序卷积模型表示为,
[0027][0028]
其中l∈[0,t
‑
1],w
t
表示t时刻的卷积权重,g(
·
)表示卷积函数。
[0029]
综合面向空间特征的聚合图高斯过程和面向时间特征的深度卷积高斯过程,最终得到面向时空特征的图高斯过程的模型表示为以下联合概率密度函数,
[0030][0031]
其中u
l
=f(z
l
)代表第l层的引诱点(inducing point)输出结果,z
l
={z1,
…
,z
n
}
l
表示第l层的引诱点集合,表示图在第l个时间步的时空特征;表示预测结果和所有t层时空特征及引诱点输出结果的联合概率,表示预测结果相对于最后一层时空特征的条件概率,表示第l层时空特征相对于引诱点输出结果的条件概率,表示引诱点输出结果的概率;
[0032]
所述时空图高斯过程模型的证据下界优化目标函数为:
[0033][0034]
其中:表示第i个节点对数似然的期望值,y
i
表示第i个节点的交通流真实值,表示第t个预测时间步中第i个节点对应的预测函数。表示分布和分布之间的kullback
‑
leibler散度;表示均值为m
l
方差为s
l
的正态分布,其中m
l
和s
l
均属于待训练的模型参数;表示u
l
和z
l
‑1的联合概率密度。
[0035]
作为优选,所述s4中,利用s1中得到的流量统计数据作为训练数据,以最小化所述目标函数为优化目标,对所述的时空图高斯过程模型进行参数更新,最终训练得到道路流量预测模型。
[0036]
作为优选,所述s5中,所采用的模型校正方法为基于极大均值差异(maximum mean discrepancy,mmd)的分布匹配法,具体做法如下:
[0037]
对于时空图高斯过程模型,交通流预测结果服从预测分布交通流真实数据服从真实分布将真实分布和预测分布分别通过核均值映射的方法映射至再生核希尔伯特空间的单位球上,得到各自其特征函数和然后针对两个特征函数分别进行m'次抽样和n'次抽样,通过二者做差来区分差异性,极大均值差异的损失函数以公式表示为:
[0038][0039]
其中表示第i
′
个抽样样本对应的特征函数的值,表示第j
′
个抽样样本对应的特征函数的值;的下角标ψ表示特征函数受到模型参数集ψ的影响;
[0040]
优化下式的目标函数,通过极小化所述损失函数继续更新模型参数集ψ,完成对道
路流量预测模型的校正:
[0041][0042]
作为优选,通过优化目标函数对道路流量预测模型进行校正时,预先设定二值测验的误差阈值为α,使用随机梯度下降法对模型参数进行更新,当满足时认为两个分布匹配,校正算法收敛,完成校正阶段的训练。
[0043]
第二方面,本发明提供了一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,能实现如第一方面任一所述的基于图高斯过程的道路交通流预测方法。
[0044]
第三方面,本发明提供一种基于图高斯过程的道路交通流预测设备,其包括存储器和处理器;
[0045]
所述存储器,用于存储计算机程序;
[0046]
所述处理器,用于当执行所述计算机程序时,实现如第一方面任一所述的基于图高斯过程的道路交通流预测方法。
[0047]
相对于现有技术而言,本发明的有益效果包括以下几方面:
[0048]
1)本发明基于高斯过程进行设计,故而具备无过拟合,数据利用率高、具备预测不确定度输出等优点;
[0049]
2)本发明集合聚合图高斯过程和深度高斯过程在数据丰富度不均匀的区域路网上,表现具有一致性,解决了数据匮乏区域现存现金模型性能衰退的问题;
[0050]
3)本发明使用基于mmd的分布匹配法对所得模型进行调优,可以在线使用,使得模型对现实环境应用具备相当强的适应能力。
附图说明
[0051]
图1为一种基于图高斯过程的交通流预测方法流程图;
[0052]
图2为时空图高斯过程模型的骨架结构示意图。
具体实施方式
[0053]
下面结合附图和具体实施例对本发明做进一步阐述和说明。
[0054]
如图1所示,在本发明的一个较佳实施例中,提供了一种基于图高斯过程的道路交通流预测方法,其包括以下步骤:
[0055]
s1、获取待预测的道路上不同位置传感器采集的与车辆流量相关的结构化交通流数据,并将其按照设定间隔步长进行分组形成,每一组数据中包含该分组对应的间隔时段内经过各传感器的车辆信息,最终得到按时间排序的流量统计数据。
[0056]
在该步骤中,传感器可以是道路上任意能够感知车辆的传感器,例如龙门架卡口、etc收费站门架、毫米波雷达、地埋线圈或者监控摄像机,为了能够实现交通流预测,传感器采集的结构化交通流数据应当包括传感器的位置信息、车辆经过时间、车牌号和车辆驾驶方向。这些信息的具体来源需要根据传感器数据特点而定,例如传感器的位置信息可以是桩号、经纬度坐标、id等,车辆经过时间在etc门架中可以通过交易时间确定。若存在多源数据,那么道路的龙门架卡口流量数据、收费站流量数据、路侧杆件的毫米波雷达流量数据、
地埋线圈感知到的流量数据等多源、多时空粒度的数据可以先进行融合,再作为本发明中的流量统计数据。
[0057]
该步骤最终得到的按时间排序的流量统计数据可以作为后续预测模型的训练数据,因此需要通过上述分组使其构建为相应的样本数据。在本实施例中,结构化采集数据(包括桩号、经纬度坐标、id、车辆经过时间、车牌号、车辆驾驶方向等)可使用统计处理工具进行分组处理,将结构化交通流数据按间隔步长分为多组流量数据,得到流量统计数据文件,具体过程可参照以下步骤实现:
[0058]
s11.使用pandas工具导入结构化交通流数据文件;
[0059]
s12.若结构化交通流数据存在多个车辆驾驶方向的数据,则先以车辆驾驶方向为维度对数据进行提取,然后将每一种车辆驾驶方向的数据分别进行分组和排序,若仅有1个车辆驾驶方向则直接进行分组和排序。分组和排序的做法如下:将数据以预设的间隔步长由数组转换为列表,重新构造索引,使得其无重复,并按照提取日期,对数据进行排序形成列表;根据每辆车被传感器感应到的车辆经过时间对数据进行分组,每一组数据记录该分组对应的间隔时段内经过各传感器的车辆信息,并将列表重新拼接为一个完整的数据文件,最终形成时间段左开右闭的数据统计结果。
[0060]
每一个车辆驾驶方向维度形成的流量统计数据,在后续仅用于训练该车辆驾驶方向的时空图高斯过程模型。
[0061]
s2、针对待预测的道路构建道路图网络结构,以每个传感器部署的点位作为图网络结构的节点,各节点之间通过边相互连接,将节点之间在道路上的实际距离做归一化处理后作为图中节点之间连接的边的权重。图网络中所有边的权重构成了邻接矩阵。
[0062]
s3、基于图高斯过程对道路的交通流数据进行建模,建模时首先使用高斯过程对单个节点的特征进行建模,再结合图网络结构的传播特性构建聚合图高斯过程(aggregated graph gaussian process,aggp)模型,以刻画区域路网的空间特征关系,然后基于深度卷积高斯过程模型对交通流数据的时间特征进行建模,将多层aggp模型进行串联,前一个aggp模型的输出成为后一个aggp模型的输入,以刻画交通流数据的时间序列特征,最终形成时空图高斯过程模型。
[0063]
如图2所示,上述时空图高斯过程模型的骨架结构是一个t层深度卷积高斯过程(deep convolutional gaussian process,dcgp),代表对于t个连续时间序列的建模,每一层都是一个aggp模型,代表对于地理空间的信息流传播的建模。
[0064]
在aggp模型中,交通流数据的空间特征被构建为一个图网络其中表示图网络中所有n个节点的集合,每个节点代表一个捕获道路交通流信息的传感器,ε表示节点之间相连的边的集合,表示不同传感器之间欧几里得距离归一化处理后构建的邻接矩阵;图网络中,具有m个维度的t步时长的数据流数据表示为x
l
和y
l
分表表示第l个时间步的历史交通流数据和当前交通流数据。上述维度m的取值为1或2,取值为1时仅具有1个维度的交通流预测结果,代表道路中的车辆流量,取值为2时具有2个维度的交通流预测结果,代表道路中的车辆流量流量以及车辆的区间速度。
[0065]
模型训练的目标是学习一个映射函数以历史交通流数据d
*
和图网络为输入,预测未来t步时长的交通流数据,即:
[0066][0067]
其中代表了交通流预测结果,ψ代表可学习的参数。
[0068]
该aggp模型中,单个节点的信息流采用如下的似然隐参表示:
[0069][0070]
其中表示节点i和节点j之间连边的信息流权重,特别的,表示节点i的自环信息流权重。表示将一个节点的空间特征建模为高斯过程,其中μ
ψ
(x)为零均值函数,核函数k
ψ
(x,x
′
)为自动相关确定(automatic relevance determination,ard)函数;为对角度矩阵中的对角元素,代表该时刻图网络上节点i的一度邻居节点。
[0071]
另外aggp模型中,任意两个不同节点m和节点n之间的协方差表示为:
[0072][0073]
其中:φ(x
i
)表示核函数k
ψ
(
·
,
·
)在重生核希尔伯特空间(reproducing kernel hilbert space,rkhs)上的映射;表示重生核希尔伯特空间中的数值内积计算。上述公式可以看作是围绕节点m和节点n的两个子图之间特征集通过核均值嵌入(kernel mean embedding)方法,进行的数值内积。
[0074]
所述t层深度卷积高斯过程中,第l层节点i的时序卷积模型表示为,
[0075][0076]
其中l∈[0,t
‑
1],w
t
表示t时刻的卷积权重,g(
·
)表示卷积函数。
[0077]
综合面向空间特征的聚合图高斯过程和面向时间特征的深度卷积高斯过程,最终得到面向时空特征的图高斯过程的模型表示为以下联合概率密度函数,
[0078][0079]
其中u
l
=f(z
l
)代表第l层的引诱点(inducing point)输出结果,z
l
={z1,
…
,z
n
}
l
表示第l层的引诱点集合,表示图在第l个时间步的时空特征,concat为拼接函数;表示预测结果和所有t层时空特征及引诱点输出结果的联合概率,表示预测结果相对于最后一层时空特征的条件概率,表示第l
层时空特征相对于引诱点输出结果的条件概率,表示引诱点输出结果的概率。需注意的是,上述公式中,由于时序上的时刻和深度卷积高斯过程的层数从设计上来说是一一对应的,因此层数l也对应于时间步l。
[0080]
该模型的每一层图高斯过程的后验分布是难以计算的,因而无法处理。为了解决上述公式所述模型的后验分布计算问题,本发明需要采用近似推断的方法对其进行逼近,从而实现模型训练。
[0081]
对于第l层图高斯过程,通过构建近似分布来逼近后验分布如此,时空图高斯过程的后验分布成为,
[0082][0083]
这里本发明选择根据dgp的优化目标函数表达式为,
[0084][0085]
本发明对上式使用杰森不等式,得出所述时空图高斯过程模型的证据下界优化目标函数为:
[0086][0087]
其中:表示第i个节点对数似然的期望值,y
i
表示第i个节点的交通流真实值,表示第t个预测时间步中第i个节点对应的预测函数。表示分布和分布之间的kullback
‑
leibler散度;表示均值为m
l
方差为s
l
的正态分布,其中m
l
和s
l
均属于待训练的模型参数;表示u
l
和z
l
‑1的联合概率密度。
[0088]
s4、利用s1中得到的流量统计数据对所述的时空图高斯过程模型进行训练,得到道路流量预测模型,用于进行实际的交通流预测。
[0089]
在训练过程中,前述s3中的目标函数即可作为模型训练的损失函数,将s1中得到的流量统计数据作为训练数据输入时空图高斯过程模型中,以最小化目标函数为优化目标,通过梯度下降算法对时空图高斯过程模型进行参数更新,最终训练得到道路流量预测模型。
[0090]
s5、利用后续获取的实际交通流数据对道路流量预测模型的预测精度进行验证,若未达到设定的精度指标,则使用模型校正方法对模型进行后校正处理,并以校正后的道路流量预测模型继续进行实际的交通流预测。
[0091]
在本发明中,所采用的模型校正方法为基于极大均值差异(maximum mean discrepancy,mmd)的分布匹配法,具体做法如下:
[0092]
对于时空图高斯过程模型,交通流预测结果服从预测分布交通流真实数据
ard核:
[0106][0107]
其中σ
ψ
代表核函数方差,ψ为对角阵,集合了各个维度数据的相关度超参数。每一层卷积高斯过程的引诱点的个数均设置为20。采用adam作为训练优化算法,其学习率设置为0.0005。
[0108]
本实例的性能评价指标包含平均绝对百分比误差(maximum absolute percentage error,mape)、平均绝对误差(maximum absolute error,mae)和均方根误差(root mean square error,rmse)的预测方法的性能:
[0109][0110][0111][0112]
其中,y
i
与分别表示真实交通流量值和预测值。
[0113]
最终预测误差指标对比如表1所示:
[0114]
表1算法误差性能对比表
[0115][0116]
受实际部署环境的制约,本实例仅使用验证集的数据对基于mmd进行分布匹配的模型校正方法进行验证:设定阈值为α=0.05,取六个高斯核,带宽参数分别设置为0.5,1,2,4,8,16作为预测分布抽样的核函数,然后将多个核函数的抽样和均值作为预测样本,和真实数据通过mmd算式进行匹配,通过随机梯度下降法调优模型的参数集,直到满足收敛条件。
[0117]
选定rmse为精度指标,基于mmd的校正算法对rmse精度的校正效果使用以下指标进行评估:
[0118][0119]
其中p=0.95为设定期望的精度置信区间,表示第i个校正样本的预测置信区
间。
[0120]
最终,本实例获得的评估指标值为ecpe=0.02
±
0.002,表明经过经过校正的模型在期望置信区间附近误差范围仅为0.02
±
0.002。
[0121]
另外,在其他实施例中,还可以提供一种基于图高斯过程的道路交通流预测装置,其包括存储器和处理器;
[0122]
所述存储器,用于存储计算机程序;
[0123]
所述处理器,用于当执行所述计算机程序时,实现如上述s1~s5所述的基于图高斯过程的道路交通流预测方法。
[0124]
另外,在其他实施例中,还可以提供一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,能实现如上述s1~s5所述的基于图高斯过程的道路交通流预测方法。
[0125]
需要注意的是,上述的存储器可以包括随机存取存储器(random access memory,ram),也可以包括非易失性存储器(non
‑
volatile memory,nvm),例如至少一个磁盘存储器。上述的处理器可以是通用处理器,包括中央处理器(central processing unit,cpu)、神经网络处理器(neural processor unit,npu)等;还可以是数字信号处理器(digital signal processing,dsp)、专用集成电路(application specific integrated circuit,asic)、现场可编程门阵列(field
‑
programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。当然,还装置中还应当具有实现程序运行的必要组件,例如电源、通信总线等等。
[0126]
以上所述的实施例只是本发明的一种较佳的方案,然其并非用以限制本发明。有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型。因此凡采取等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1