图像处理方法及装置与流程
本公开涉及计算机通信,尤其涉及一种图像处理方法及装置。
背景技术:
1、相比于传统的相机,深度相机增加了深度测量功能,从而方便和准确地获知周围的环境及变化。深度相机的测距原理是:向目标物连续发送光脉冲,使用传感器接收经物体反射的光脉冲,根据探测光脉冲的飞行时间确定目标物的距离。
2、深度相机在完成深度测量后输出深度图,深度图中的像素坐标包括:像素在水平方向上的位置信息、像素在竖直方向上的位置信息和深度值,深度值指示像素所显示的物体与相机的距离。
3、然而在一些情况下,深度图显示的结构与实际结构存在偏差,深度图的显示效果不佳。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供了一种图像处理方法及装置。
2、根据本公开实施例的第一方面,提供了一种图像处理方法,应用于电子设备,所述电子设备包括深度相机,所述方法包括:
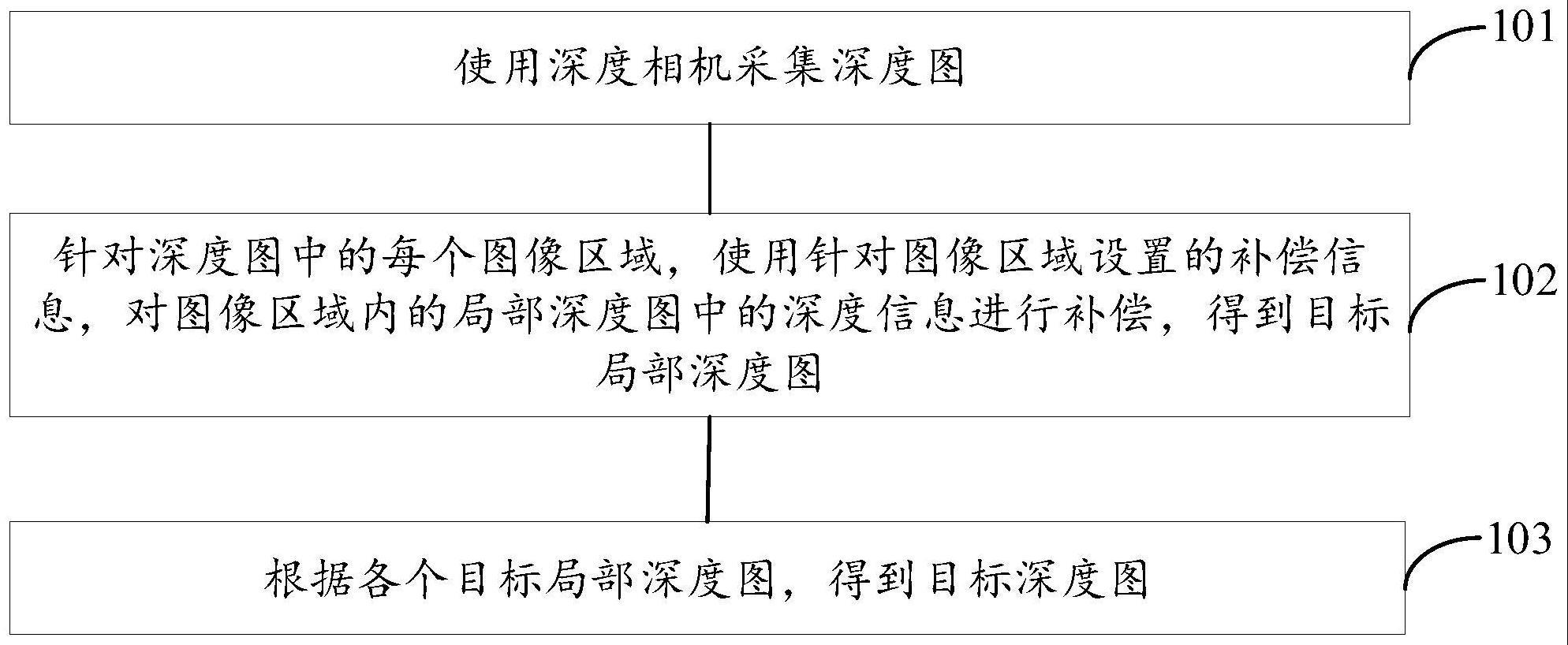
3、使用所述深度相机采集深度图;
4、针对所述深度图中的每个图像区域,根据针对所述图像区域设置的补偿信息,对所述图像区域内的局部深度图中的深度信息进行补偿,得到目标局部深度图;
5、根据各个目标局部深度图,得到目标深度图。
6、可选地,所述根据针对所述图像区域设置的补偿信息,对在所述图像区域内显示的局部深度图中的深度信息进行补偿,包括:
7、确定所述局部深度图中的深度信息的第一表达式,所述第一表达式中的自变量包括像素位置信息;
8、根据针对所述图像区域设置的补偿常数,对所述第一表达式中的常数进行补偿,得到第二表达式;
9、根据所述局部深度图中的像素位置信息和所述第二表达式,确定所述局部深度图中的目标深度信息。
10、可选地,所述方法包括:
11、使用所述深度相机采集测试面的实时深度图,所述测试面和所述深度相机的成像平面满足预设平行条件;
12、针对所述实时深度图中的每个图像区域内的局部实时深度图,确定所述局部实时深度图中的深度信息的第三表达式;
13、确定所述测试面的标准深度图中与所述局部实时深度图位于相同图像区域内的局部标准深度图;
14、确定所述局部标准深度图中的深度信息的第四表达式;
15、根据所述第四表达式中的常数,对所述第三表达式中的常数进行补偿,得到针对所述局部实时深度图所在的图像区域设置的补偿常数。
16、可选地,所述根据所述第四表达式中的常数,对所述第三表达式中的常数进行补偿,包括:
17、确定所述第三表达式中的常数与所述第四表达式中的常数之间的第一差异;
18、根据包括所述第一差异的差异集合,对所述第三表达式中的常数进行补偿,所述差异集合包括在通过所述深度相机对不同距离的所述测试面进行图像采集时、针对相同图像区域确定的差异。
19、可选地,所述根据包括所述第一差异的差异集合,对所述第三表达式中的常数进行补偿,包括:
20、确定当前的拍摄场景;
21、确定适于所述拍摄场景的差异计算方式;
22、按照所述差异计算方式,对所述差异集合中的差异进行计算;
23、根据计算结果,对所述第三表达式中的常数进行补偿。
24、可选地,所述差异计算方式包括针对所述差异集合中的差异设置的权重系数;所述按照所述差异计算方式,对所述差异集合中的差异进行计算,包括:
25、使用所述权重系数,对所述差异集合中的差异进行权重计算。
26、可选地,所述方法包括:
27、针对所述实时深度图中的至少一个局部实时深度图,根据每个局部实时深度图中的像素的像素位置信息和补偿后的第三表达式,确定所述像素的目标深度信息,所述补偿后的第三表达式包括所述补偿常数;
28、根据针对所述至少一个局部实时深度图中的像素确定的目标深度信息,确定所述测试面的平面度;
29、确定所述平面度是否满足预设平面度条件;
30、若不满足,则对所述补偿后的第三表达式中的所述补偿常数进行调整。
31、可选地,所述根据针对各个局部实时深度图中的像素确定的目标深度信息,确定所述测试面的平面度,包括:
32、针对所述至少一个局部实时深度图中的每个局部实时深度图,根据针对所述局部实时深度图中的像素确定的目标深度信息,确定局部测试面的平面度;
33、对至少一个局部测试面的平面度进行统计,得到所述测试面的平面度。
34、可选地,目标深度信息包括目标深度值;所述根据针对所述局部实时深度图中的像素确定的目标深度信息,确定局部测试面的平面度,包括:
35、计算针对所述局部实时深度图中的所有像素确定的目标深度值的平均值;
36、针对所述局部实时深度图中的每个像素,确定所述像素的目标深度值与所述平均值之间的差异;
37、对针对所述局部实时深度图确定的多个差异进行统计,得到所述局部测试面的平面度。
38、根据本公开实施例的第二方面,提供了一种图像处理装置,应用于电子设备,所述电子设备包括深度相机,所述装置包括:
39、深度图采集模块,被配置为使用所述深度相机采集深度图;
40、深度信息补偿模块,被配置为针对所述深度图中的每个图像区域,根据针对所述图像区域设置的补偿信息,对所述图像区域内的局部深度图中的深度信息进行补偿,得到目标局部深度图;
41、目标深度图获得模块,被配置为根据各个目标局部深度图,得到目标深度图。
42、可选地,所述深度信息补偿模块,包括:
43、第一表达式确定子模块,被配置为确定所述局部深度图中的深度信息的第一表达式,所述第一表达式中的自变量包括像素位置信息;
44、常数补偿子模块,被配置为根据针对所述图像区域设置的补偿常数,对所述第一表达式中的常数进行补偿,得到第二表达式,所述补偿信息包括所述补偿常数;
45、目标深度信息确定子模块,被配置为根据所述局部深度图中的像素位置信息和所述第二表达式,确定所述局部深度图中的目标深度信息。
46、可选地,所述装置包括:
47、实时深度图采集模块,被配置为使用所述深度相机采集测试面的实时深度图,所述测试面和所述深度相机的成像平面满足预设平行条件;
48、第三表达式确定模块,被配置为针对所述实时深度图中的每个图像区域内的局部实时深度图,确定所述局部实时深度图中的深度信息的第三表达式;
49、局部标准深度图确定模块,被配置为确定所述测试面的标准深度图中与所述局部实时深度图位于相同图像区域内的局部标准深度图;
50、第四表达式确定模块,被配置为确定所述局部标准深度图中的深度信息的第四表达式;
51、常数补偿模块,被配置为根据所述第四表达式中的常数,对所述第三表达式中的常数进行补偿,得到针对所述局部实时深度图所在的图像区域设置的补偿常数。
52、可选地,所述常数补偿模块,包括:
53、差异确定子模块,被配置为确定所述第三表达式中的常数与所述第四表达式中的常数之间的第一差异;
54、差异集合使用子模块,被配置为根据包括所述第一差异的差异集合,对所述第三表达式中的常数进行补偿,所述差异集合包括在通过所述深度相机对不同距离的所述测试面进行图像采集时、针对相同图像区域确定的差异。
55、可选地,所述差异集合使用子模块,包括:
56、场景确定单元,被配置为确定当前的拍摄场景;
57、方式确定单元,被配置为确定适于所述拍摄场景的差异计算方式;
58、差异计算单元,被配置为按照所述差异计算方式,对所述差异集合中的差异进行计算;
59、常数调整单元,被配置为根据计算结果,对所述第三表达式中的常数进行补偿。
60、可选地,所述差异计算方式包括针对所述差异集合中的差异设置的权重系数;
61、所述差异计算单元,被配置为使用所述权重系数,对所述差异集合中的差异进行权重计算。
62、可选地,所述装置包括:
63、信息确定模块,被配置为针对所述实时深度图中的至少一个局部实时深度图,根据每个局部实时深度图中的像素的像素位置信息和补偿后的第三表达式,确定所述像素的目标深度信息,所述补偿后的第三表达式包括所述补偿常数;
64、平面度确定模块,被配置为根据针对所述至少一个局部实时深度图中的像素确定的目标深度信息,确定所述测试面的平面度;
65、平面度判断模块,被配置为确定所述平面度是否满足预设平面度条件;
66、常数调整模块,被配置为若不满足,则对所述补偿后的第三表达式中的所述补偿常数进行调整。
67、可选地,所述平面度确定模块,包括:
68、第一平面度确定子模块,被配置为针对所述至少一个局部实时深度图中的每个局部实时深度图,根据针对所述局部实时深度图中的像素确定的目标深度信息,确定局部测试面的平面度;
69、第二平面度确定子模块,被配置为对至少一个局部测试面的平面度进行统计,得到所述测试面的平面度。
70、可选地,目标深度信息包括目标深度值;所述第一平面度确定子模块,包括:
71、平均值计算单元,被配置为计算针对所述局部实时深度图中的所有像素确定的目标深度值的平均值;
72、差异确定单元,被配置为针对所述局部实时深度图中的每个像素,确定所述像素的目标深度值与所述平均值之间的差异;
73、差异统计单元,被配置为对针对所述局部实时深度图确定的多个差异进行统计,得到所述局部测试面的平面度。
74、根据本公开实施例的第三方面,提供了一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一方面中任一项所述的方法。
75、根据本公开实施例的第四方面,提供了一种电子设备,包括:
76、处理器;
77、用于存储处理器可执行指令的存储器;
78、其中,所述处理器被配置为执行所述指令,以实现上述第一方面中任一项所述的方法。
79、本公开实施例提供的技术方案可以包括以下有益效果:
80、本公开实施例中,使用深度相机采集深度图,针对深度图中的每个图像区域,使用针对该图像区域设置的补偿信息,对该图像区域内的局部深度图中的深度信息进行调整,得到目标局部深度图,根据各个目标局部深度图,得到目标深度图。使用上述方法优化了深度图中的结构,使得深度图中的结构更加接近真实结构。
81、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!