基于光栅尺定位的运动位置误差补偿技术实现跨视野高精度测量的方法与流程
1.本发明主要涉及机器视觉技术领域,尤其是一种基于光栅尺定位的运动位置误差补偿技术实现跨视野高精度测量的方法。
背景技术:
2.现有一些大尺寸工件的测量,无论是通过移动测头(工业相机),还是移动测量平台,通常都依赖于移动导轨的直线度、平面度和定位精度,如利用滚珠丝杠或直线电机来移动测头或工件来进行取图计算。
3.这种方法对导轨的定位精度、直线度、平面度和垂直度都提出了很高要求,对存在公差较大的导轨机构不适合,要想对工件尺寸进行10微米以内的检测精度,尤其是跨视野的尺寸测量基本是达不到的,对工作台的设计、加工和安装调试、误差补偿等提出了很高的要求,时间和成本都很高。
4.另一方面,还有一些采用拼图的方法,但由于没有考虑相机与机构夹角带入的误差,拼接重叠部分的阈值处理导致图像丢失了真实的特征,拼接后的图像再进行测量时,准确性无法保证,达不到对尺寸精度的要求。
技术实现要素:
5.为了克服上述现有导轨移动平台系统在设计和安装调试上对测距精度的影响,本发明提出一种基于光栅尺定位的运动位置误差补偿技术实现跨视野高精度测量的方法。
6.本发明采用的技术方案是,本发明方法在自动化设备上进行,其中,自动化设备上设置有相机以及带动测量平台运动的xy轴电机组,在自动化设备上还设置有光栅尺,所述xy轴电机组带动所述测量平台沿光栅导轨运动,运动到相机固定位置的视野内暂停,由所述相机对工件进行拍图,然后再移动到下一位置进行拍图,所述光栅尺记录所述测量平台的移动取图位置。该方法包括以下步骤:(1)在自动化设备上,对所述相机、带光栅导轨的测量平台进行正确安装、充分调校来保证相机光轴和测量平台的高垂直度关系;(2)在所述测量平台上,借助标定板对所述相机进行高精度多项式标定以及对所述标定板的运动测量,得到测量平台沿光栅导轨的运动方向和选定的世界坐标系之间的夹角;(3)在所述光栅导轨运动到不同的位置,在所述测量平台上拍摄出成对的组图,然后对所有的组图进行跨视野尺寸计算,将未加误差补偿的光栅导轨系统的运动通过类标定的误差补偿技术来弥补所述测量平台运动产生的位置误差引起的测量尺寸偏差,达到跨视野高精度测量的效果。
7.实际标定时,标定板的放置很难保证与光栅导轨方向完全一致,即使很微小的角度也会对测距精度有影响,有必要考虑到位置坐标计算中来,所述步骤(2)中高精度多项式
标定以及运动测量夹角的过程进一步描述如下:a)根据视野大小,选择1/4到1/3视野尺寸的标定板,调整相机有效拍摄参数,得到较好的灰度值。然后在一个视野内上下左右和中间位置,多角度采集多张标定板图像,选取一张作为参考位姿,标定计算得到所述相机的内参矩阵和外参矩阵,小于等于0.1像素左右的平均误差为宜;b)从所述a)中拍摄的多张标定图中,选取作为参考位姿来计算外参矩阵的标定板图像上7
×
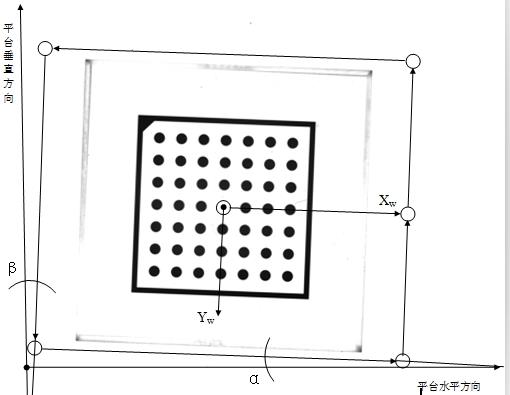
7中心圆的圆心作为世界坐标原点,通过自动化设备控制所述xy轴电机组沿导轨运动,带动其上的测量平台移动到新的位置,不超出一个相机视野,分别沿四个边移动最大距离,保证中心圆在每张图像上都完整显示; c)根据边缘提取找圆心方法得到每张图上中心圆的圆心亚像素坐标,并转换到世界坐标,由不同图上所述中心圆圆心坐标,分别计算出口字形相邻两个边与世界坐标系、轴的夹角α和β。
8.本发明内容所述步骤(3)中类标定和位置误差补偿技术过程详细描述如下:1)将具有1微米尺寸精度的回形板待测尺寸的角点放在测量平台上相机位置,拍摄一张具有待测轮廓线的左图,然后沿导轨x向或y向移动测量平台接近待测尺寸距离d(单位mm)到新的位置,拍摄一张具有另一条待测轮廓线的右图;2)由线轮廓提取方法得到左图待测轮廓线起止点图像亚像素坐标(xls, yls)和(xle, yle), 再找到对应测量的右图并提取待测轮廓线起止点图像亚像素坐标(xrs, yrs)和(xre, yre);计算出右侧线段中点图像亚像素坐标(,),并将导轨的双向移动距离投影到世界坐标系的轴和轴,得到相对于左图的右图的线段中点在z = 0平面内的世界坐标(,):):式中, xg,yg分别是光栅导轨移动后,两次取图位置之间的xy轴光栅坐标相对差值;然后由点到直线的距离计算出所要测量的线线距离;3)通过不断重复1)2)的步骤,保证取图几乎覆盖所述测量平台上相对移动距离为d的全部位置,计算出所有的待测量跨视野尺寸,得到大量的线线距离误差和对应的对图的光栅位置坐标;4)通过对3)中数据进行预处理,然后进行交叉多项式拟合,以误差残差平方和最小为优化目标,得到一组或多组方程系数(,,
ꢀ…
,),所述实例中以90mm的尺寸测量为例,拟合方程为2阶交叉多项式;式中,为误差矩阵,,,
ꢀ…
,为多项式各阶系数,(x1y1),(x2y2)为所述
任意对图的光栅位置坐标;5)将待测尺寸的工件放在所述测量平台上任意位置,保证移动测量距离d(mm)后可以拍到另一侧的检测线,应用2)中的方法进行划线,提取边界进行计算,应用4)中的方法对测量结果进行补偿,可以达到10微米之内的测量精度,实现了跨视野大尺寸高精度测量。
附图说明
9.通过阅读参照以下附图对基于光栅尺定位的运动位置误差补偿技术实现跨视野高精度测量的方法给出示例结果,本发明的应用目标、目的和优点也会变得更清晰:图1为本发明的标定板中心随平台运动与选定的世界坐标系之间的关系示意图;图2为具有1微米精度的最大尺寸100mm的回形板示意图;图3为不同位置采集图像,与在移动距离d后采集的多对图像示意图,图中1为带有某一检测轮廓的左图,2为移动距离d后对应的带有某一检测轮廓的右图;图4展示经过补偿后的三张不同位置图像的跨视野尺寸测量结果。
具体实施方式
10.下面结合附图和具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这里所描述的实施样例,仅仅是本发明申请的一个实施样例,本发明申请并非只限于所示的实施样例,而是与符合本发明申请所公开的原理和特征的最广范围相一致。
11.本发明通过基于光栅尺定位的运动位置误差补偿技术实现跨视野高精度测量的方法,采用高精度相机标定、跨视野测量距离与移动测量平台位置的误差补偿技术对不在同一视野内的大尺寸进行测量,获取工件的dxf文件,从中分离出待检测轮廓,形成独立分级轮廓,保证可以找到准确的基准,基于模板匹配后进行在线测距。
12.如图1到图4所示,本发明方法在自动化设备上进行,适用于各种机器视觉检测软件,自动化设备上设置有相机以及带动测量平台运动的xy轴电机组,在自动化设备上还设置有光栅尺,所述xy轴电机组带动所述测量平台沿光栅导轨运动,运动到相机固定位置的视野内暂停,由所述相机对工件进行拍图,然后再移动到下一位置进行拍图,所述光栅尺记录所述测量平台的移动取图位置。该方法包括以下步骤:(1)在自动化设备上,对所述相机、带光栅导轨的测量平台进行正确安装、充分调校来保证相机光轴和测量平台的高垂直度关系;(2)在所述测量平台上,借助标定板对所述相机进行高精度多项式标定以及对所述标定板的运动测量,得到测量平台沿光栅导轨的运动方向和选定的世界坐标系之间的夹角;(3)在所述光栅导轨运动到不同的位置,在所述测量平台上拍摄出成对的组图,然后对所有的组图进行跨视野尺寸计算,将未加误差补偿的光栅导轨系统的运动通过类标定的误差补偿技术来弥补所述测量平台运动产生的位置误差引起的测量尺寸偏差,达到跨视野高精度测量的效果。
13.实际标定时,标定板的放置也难保证与光栅导轨方向完全一致,即使很微小的角
度也会对测距精度有影响,有必要考虑到位置坐标计算中来,所述步骤(2)中高精度多项式标定以及运动测量夹角的过程进一步描述如下:a)根据视野大小,选择1/4到1/3视野尺寸的标定板,调整相机有效拍摄参数,得到较好的灰度值。然后在一个视野内上下左右和中间位置,多角度采集多张标定板图像,选取一张作为参考位姿,标定计算得到所述相机的内参矩阵和外参矩阵,小于等于0.1像素左右的平均误差为宜;b)从所述a)中拍摄的多张标定图中,选取作为参考位姿来计算外参矩阵的标定板图像上7
×
7中心圆的圆心作为世界坐标原点,通过自动化设备控制所述xy轴电机组带动滚珠丝杠沿导轨运动,带动其上的测量平台移动到新的位置,不超出一个相机视野,分别沿四个边移动最大距离,保证中心圆在每张图像上都完整显示;c)根据边缘提取找圆心方法得到每张图上中心圆的圆心亚像素坐标,并转换到世界坐标,由不同图上所述中心圆圆心坐标,分别计算出口字形相邻两个边与世界坐标系、轴的夹角α和β。
14.所述步骤(3)中类标定和位置误差补偿技术过程详细描述如下:1)将具有1微米尺寸精度的回形板待测尺寸的角点放在测量平台上相机位置,拍摄一张具有待测轮廓线的左图,然后沿导轨x向或y向移动测量平台接近待测尺寸距离d(单位mm)到新的位置,拍摄一张具有另一条待测轮廓线的右图;2)由线轮廓提取方法得到左图待测轮廓线起止点图像亚像素坐标(xls, yls)和(xle, yle), 再找到对应测量的右图并提取待测轮廓线起止点图像亚像素坐标(xrs, yrs)和(xre, yre);计算出右侧线段中点图像亚像素坐标(,),并将导轨的双向移动距离投影到世界坐标系的轴和轴,得到相对于左图的右图的线段中点在z = 0平面内的世界坐标(,):):式中,, 分别是光栅导轨移动后,两次取图位置之间的xy轴光栅坐标相对差值;然后由点到直线的距离计算出所要测量的线线距离;3)通过不断重复1)2)的步骤,保证取图几乎覆盖所述测量平台上相对移动距离为d的全部位置,计算出所有的待测量跨视野尺寸,得到大量的线线距离误差和对应的对图的光栅位置坐标;4)通过对3)中数据进行预处理,然后进行交叉多项式拟合,以误差残差平方和最小为优化目标,得到一组或多组方程系数(,,
ꢀ…
,),所述实例中以90mm的尺寸测量为例,拟合方程为2阶交叉多项式;
式中,为误差矩阵,,,
ꢀ…
,为多项式各阶系数,(x1y1),(x2y2)为所述任意对图的光栅位置坐标;5)将待测尺寸的工件放在所述测量平台上任意位置,保证移动测量距离d(mm)后可以拍到另一侧的检测线,应用2)中的方法进行划线,提取边界进行计算,应用4)中的方法对测量结果进行补偿,可以达到10微米之内的测量精度,实现了跨视野大尺寸高精度测量。
15.本发明由光栅尺(精度可达到 <=1微米)进行定位,定位精度高,但由于导轨设计、安装调试等都没有达到同样精度,导致测量平台移动时,真正的运行轨迹与定位长度不同而带来测距误差。本发明采用的类标定,覆盖整个测量平台跨视野测距
‑
位置误差补偿技术解决了没有进行两坐标运动误差补偿的光栅导轨平台精度不足的问题,可以实现跨视野大尺寸高精度测距。
16.以上就是本发明申请基于光栅尺定位的运动位置误差补偿技术实现跨视野高精度测量的主要实施方法,上述的具体实施方式用于解释说明本发明申请,是本发明的一个优选实施样例,而不是对本发明申请的限制,在本发明申请的权利要求保护范围内,对本发明申请的任何改进、修改等都属于本发明申请的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1