一种基于协变的线结构光光平面标定方法
1.本发明涉及非接触测量技术领域,尤其是一种基于协变的线结构光光平面标定方法。
背景技术:
2.线结构光测量技术是一种非接触、抗噪性强、精度高的测量方式,其中线结构光光平面的标定精度是该测量技术的重要保证。线结构光三维测量,是由激光器投射激光至被测表面,由相机采集经过调质过后的激光条纹,通过细化得到亚像素条纹中心,以相机成像模型方程与光平面的三维空间方程恢复物体表面条纹处的三维坐标,因此实现光平面高精度的标定是线结构光精密测量的一个关键技术。
3.目前的线结构光测量多采用基于交比不变的光平面标的方法,通过平面靶标上已知标定点的坐标信息,由交比获得激光线与已知标定点的交点坐标,用于光平面标定,该方法所需平面靶标简单,精度高,但是获得的特征点数量少,受空间位姿的影响,特征点分布受认为因素影响较大,没有充分利用条纹数据。
技术实现要素:
4.本发明所要解决的技术问题在于,提供一种基于协变的线结构光光平面标定方法,保证了标定精度和速度,每张图像数据对平面方程参数影响相同,保证抗噪性。
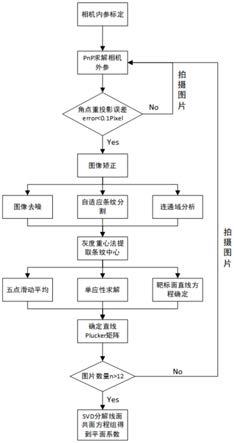
5.为解决上述技术问题,本发明提供一种基于协变的线结构光光平面标定方法,包括如下步骤:
6.(1)采用基于平面靶标的相机标定方法,获得相机内参矩阵m与畸变参数;
7.(2)采集带有激光线条纹的平面靶标图片,对其上的平面靶标圆心利用pnp求解相机相对于世界坐标系的位姿矩阵w,剔除求解重投影误差大的图片;
8.(3)矫正标定图片,利用canny获得所有图像中的边缘并统计灰度,通过大津阈值法计算阈值,结合最高灰度值得到自适应分割阈值t并对分割图像进行连通域分析,得到最大连通域所在最小包围矩形作为光条感兴趣区;
9.(4)利用灰度重心法提取感兴趣区中光条亚像素中心点,利用5点滑动平均法光顺光条中心点集,最小二乘法拟合中心线方程i;
10.(5)利用平面靶标上已知圆心坐标与图像中圆心点计算两平面之间的单应性矩阵h,利用协变得到平面靶标二维平面上中心线的方程系数i'=i
·
h
‑1;
11.(6)计算世界坐标系下光条中心线的plucker矩阵方程l
w
,利用步骤(2)中的位姿关系得到相机坐标系光条中心线的plucker矩阵方程l
c
,为l
c
=(wa)
·
(wb)
t
‑
(wb)
·
(wa)
t
=wl
w
w
t
,其中a,b为任意两点直线上三维坐标;
12.(7)利用直线方程在光平面方程上建立线面约束方程l
c
·
π=0;
13.(8)拍摄多组不同位姿下的光条图像,建立超静定线面约束方程组,采用svd分解线面约束方程组得到光平面方程系数。
14.优选的,步骤(3)中,矫正标定图片,利用canny获得所有图像中的边缘并统计灰度,通过大津阈值法计算阈值,结合最高灰度值得到自适应分割阈值t并对分割图像进行连通域分析,得到最大连通域所在最小包围矩形作为光条感兴趣区具体为:利用canny获得图像中所有边缘位置得到边缘图像,将其作为掩模获取边缘处所有灰度值,利用大津阈值法算得到阈值t
otsu
,结合光条上最大灰度值g,得到自适应分割阈值t=(t
otsu
+g)/2,根据自适应分割阈值结果得到分割图像,根据连通域分析选择连通域最大的区域作为棋盘格上光条的感兴趣区。
15.优选的,步骤(4)中,利用灰度重心法提取感兴趣区中光条亚像素中心点,利用5点滑动平均法光顺光条中心点集,最小二乘法拟合中心线方程i具体为:以行为搜索对象对感兴趣区中连通域标签为最大值的光条进行统计,利用灰度重心法提取光条中心点(x
m
,y
m
),计算过程为
[0016][0017]
其中i(x
i
,y
i
)为图像(x
i
,y
i
)处的灰度,待提取完成后利用五点滑动平滑光顺中心点集,得到新的坐标点(x
′
m
,y
′
m
)。
[0018]
优选的,步骤(5)中,利用平面靶标上已知圆心坐标与图像中圆心点计算两平面之间的单应性矩阵h,利用协变得到平面靶标二维平面上中心线的方程系数i'=i
·
h
‑1具体为:使用设计的平面靶标,大圆确定坐标系,小圆确定圆心,中间区域用于投射激光线,另在二维射影变换中,两平面之间点与点存在单应性关系,x
′
=h
·
x,又点在直线上,可推导出两平面之间直线的单应性关系也即协变,直线方程采用最小二乘法拟合,
[0019][0020]
其中i、i
′
为两平面上直线方程系数,x、x
′
为两直线上点的齐次表达式。
[0021]
优选的,步骤(6)中,计算世界坐标系下光条中心线的plucker矩阵方程l
w
,利用步骤(2)中的位姿关系得到相机坐标系光条中心线的plucker矩阵方程l
c
,为l
c
=(wa)
·
(wb)
t
‑
(wb)
·
(wa)
t
=wl
w
w
t
,其中a,b为任意两点直线上三维坐标具体为:在直线i
′
上任意取两点,又由于点在平面靶标平面上,满足z=0,将两点转换成三维点坐标,根据plucker转换得到矩阵l
w
[0022][0023]
其中a、b为世界平面上的点,那么相机坐标系的空间直线方程为
[0024]
l
c
=wl
w
w
t
。
[0025]
优选的,步骤(8)中,拍摄多组不同位姿下的光条图像,建立超静定线面约束方程组,采用svd分解线面约束方程组得到光平面方程系数具体为:选择多组不同位姿多次移动靶标平面(n≥2),得到多组光平面上的直线l
ci
,建立线面方程组
[0026]
l
t
·
π=0,其中,l=(l
c1
,l
c2
,
…
,l
cn
)
[0027]
利用svd分解l,l=udv
t
,d中最小奇异值在v
t
中的特征向量为平面方程的系数π。
[0028]
本发明的有益效果为:(1)获取的激光条纹精度高,抗噪性强,可以作为光平面标定初始数据,保证了标定精度;(2)获光条中心线方程数据快,只需要单应性变换即可获得光条直线方程表达参数,保证了标定速度;(3)充分利用光条数据,避免了特征点提取和特征点分布问题,使得每张图像数据对平面方程参数影响相同,保证抗噪性。
附图说明
[0029]
图1为本发明的标定原理示意图。
[0030]
图2为本发明相机标定所需的平面靶标示意图。
[0031]
图3为本发明的平面靶标上光条纹提取结果在原始图像的显示图。
[0032]
图4为本发明标定的流程示意图。
具体实施方式
[0033]
如图1和图4所示,一种基于协变的线结构光光平面标定方法,包括如下步骤:
[0034]
步骤1,采用基于平面靶标的相机标定方法,获得相机内参矩阵m与畸变参数,标定板如图2所示;
[0035]
步骤2,采集带有激光线条纹的标定板图片如图3所示,将激光线投射至平面靶标中间空白区域,然后提取图中圆心,根据pnp求解相机相对于世界坐标系的位姿矩阵w,用理论交点根据位姿矩阵计算角点的重投影,若重投影小于0.1pixel,则进行下面步骤,否则继续采集图片;
[0036]
步骤3,矫正标定图片,利用canny获得图像中所有边缘位置得到边缘图像,将其作为掩模获取边缘处所有灰度值,利用大津阈值法算得到掩模中边缘图像的阈值t
otsu
,结合光条上最大灰度值g,一般灰度为255,得到自适应分割阈值t=(t
otsu
+g)/2,根据自适应分割阈值结果得到分割图像,根据连通域分析确定所有连通域,选择连通域最大的区域作为棋盘格上光条所在的感兴趣区。
[0037]
步骤4,以行为搜索对象对感兴趣区中连通域标签为最大值的光条进行统计,根据灰度重心法提取光条中心点(x
m
,y
m
),计算过程为
[0038][0039]
其中i(x
i
,y
i
)为图像(x
i
,y
i
)处的灰度,待提取完成后利用五点滑动平滑光顺中心点集,得到新的坐标点(x
′
m
,y
′
m
)。利用5点滑动平均法光顺光条中心点集,最小二乘法拟合中心线方程i;
[0040]
步骤5,利用平面靶标上已知圆心坐标与图像中圆心坐标计算两平面之间的单应性矩阵h,利用协变得到平面靶标二维平面上中心线的方程系数i'=i
·
h
‑1,拟合结果如图2所示,其中大圆用于建立世界坐标系,小圆圆心作为标定点,中间用于投射激光线。
[0041]
步骤6,在直线i
′
上任意取两点,又由于点在平面靶标上,满足z=0,将两点二维坐标转换成三维点坐标,根据plucker转换如公式得到矩阵l
w
[0042][0043]
其中a、b为世界平面上的点,那么相机坐标系的空间直线方程l
c
为
[0044]
l
c
=wl
w
w
t
[0045]
步骤7,利用直线方程在光平面方程上建立线面约束方程l
c
·
π=0
[0046]
步骤8,拍摄12张组不同位姿下的光条图像,建立超静定线面约束方程组,采用svd分解线面约束方程组得到光平面方程系数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1