一种行走步态周期阶段的判定方法
1.本发明涉及信号识别领域,具体涉及一种行走步态周期阶段的判定方法。
背景技术:
2.行走的步态周期阶段划分是十分重要的,其划分结果被用于人体生物力学计算、康复训练装置或者外骨骼机器人的辅助力计算。
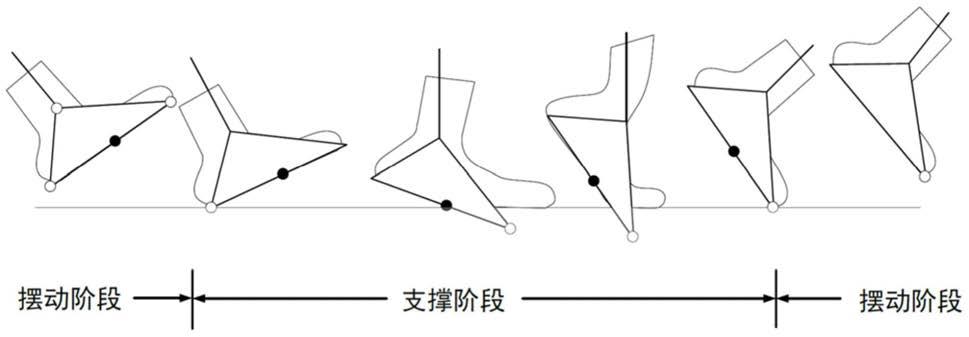
3.人体的行走通常认为是使个体位置前进的肢体运动循环模式,并且任意时刻都存在人体与地面的接触位置。由于人体行走的循环特征,一段速度稳定的行走步态往往被分解为数个循环步态的叠加,其中作为单位的每一个步态序列即一个行走步态周期。通过对大量的人类行走步态周期做研究,根据不同的视角,对于人体行走步态的研究将步态周期分为两个阶段:从单侧下肢的视角看,步行周期分为该侧的站立期和摆动期;从两侧下肢的视角看,步行周期分为单支撑阶段和双支撑阶段。
4.在单侧下肢的视角下,站立阶段还可以继续分解为(
ⅰ
)脚跟着地,(
ⅱ
)足部放平,(
ⅲ
)站立中期,(
ⅳ
)脚跟离地,(
ⅴ
)脚尖离地。
5.对于步态周期阶段的判定,一般是根据足底设置的压力传感器或者测力板进行识别,但是会增加硬件成本。在动作捕捉系统、康复训练装置或者外骨骼机器人中,人体姿态相关传感器通常是已经部署的,如果能够借助姿态传感器即可获得人体步态周期阶段判定并达到一定的精度,则可以减少传感器部署,从而优化系统。
技术实现要素:
6.为了克服现有技术存在的缺点与不足,本发明提供一种行走步态周期阶段的判定方法。本方法借助于姿态传感器数据实现步态周期划分,划分结果相对精准。
7.本发明采用如下技术方案:
8.一种行走步态周期阶段的判定方法,包括:
9.获取姿态传感器数据信息,建立人体模型和足部模型;
10.结合优化算法及标定调整足部模型参数,获得最佳足部模型;
11.输入各关节姿态,得到当前的步态周期阶段。
12.进一步,所述人体模型为人体运动学模型。
13.进一步,所述足部模型为设置四个位置传递点的三角形结构,所述四个位置传递点坐标位置由四个参数确定,所述四个参数包括足尖系数l
t
,足跟系数l
h
,足高系数l
f
及虚拟传递点位置系数α;
14.构成的四个位置传递点在足部的局部位置坐标为:
15.足跟点:[
‑
l
h0‑
l
f
];足尖点:[l
t0‑
l
f
];踝关节点:[000];虚拟点:[α(p
to,x
‑
p
he,x
)+p
he,x
0p
to,z
],其中p
to,x
为足尖点x坐标,p
he,x
为足跟点x坐标,p
to,z
为足尖点z坐标。
[0016]
进一步,所述结合优化算法及标定调整足部模型参数,获得最佳足部模型,具体为:
[0017]
训练阶段:设立虚拟传递点位置初始系数α,获取人体关节角度,输入足部模型,得到步态周期阶段;
[0018]
标定阶段:在地面设定两块测力板,在标定行走时分别两脚依次踏入两块不同的测力板,得到步态周期阶段;
[0019]
将模型得到步态阶段与测力板标定得到的步态阶段进行对比,对足部模型系数进行寻优,直到对比的误差最小。
[0020]
进一步,误差计算公式为:
[0021][0022]
式中,δ为运动学计算误差,t
ds,e
为标定测得双支撑开始时刻,t
ds,m
为模型计算双支撑开始时刻,t
de,e
为标定测得双支撑结束时刻,t
de,m
为模型计算双支撑结束时刻,c为步态周期时间。
[0023]
进一步,足跟、踝关节、虚拟点的z坐标不能小于0,若其任意点的z坐标等于零,则该点作为人体模型运动学的起始点进行计算。
[0024]
进一步,所述输入各关节姿态,得到当前的步态周期阶段,具体为:
[0025]
输入各关节姿态后,计算出四个位置传递点在地面坐标系下的位置坐标,进一步判定单脚与地面关系:
[0026]
单脚触地时间:p
he,z
≤0
[0027]
单脚离地时间:p
to,z
>0
[0028]
双支撑阶段c
d
判定为
[0029]
c
st,i
=t
hs,i
‑
t
to,i
[0030]
c
d
=c
st,left
∩c
st,right
[0031]
式中t
hs,i
为某侧单脚离地起始时间,t
to,i
为某侧单脚触地起始时间。步态周期内,除去双支撑阶段的剩余周期阶段为单支撑阶段。
[0032]
进一步,测力板得到步态阶段的方法为,若两个测力板监测力同时超过某阈值,则判定为双支撑阶段,否则为单支撑阶段。
[0033]
进一步,采用遗传算法进行寻优。
[0034]
本发明的有益效果:
[0035]
(1)相比于传统足底压力步态周期判定方法,本发明仅通过各个人体姿态数据即可计算步态周期。在既需要姿态数据又需要步态周期判定的场景下,减少了传感器的数量,从而减少了系统布置。
[0036]
(2)相比于通过振荡器的步态周期判定方法,本发明的每一个周期从理论上来说都要更加精准,没有延迟性。
[0037]
(3)本方法的步态周期判定准确性很大程度上取决于足部建模方法。在本发明中,提出含有虚拟足部传递点的4点足部建模方法,结合训练标定实验和优化算法修正足部模型参数,完善模型,使得判定的准确度较高。
附图说明
[0038]
图1是本发明的步态周期判定原理示意图;
[0039]
图2是本发明的足部模型示意图;
[0040]
图3(a)及图3(b)是本发明实施例2的测力板结果与步态周期结果判定方法的对比图。
具体实施方式
[0041]
下面结合实施例及附图,对本发明作进一步地详细说明,但本发明的实施方式不限于此。
[0042]
实施例1
[0043]
一种行走步态周期阶段的判定方法,包括如下步骤:
[0044]
如图1所示,s1获取姿态传感器数据信息,建立人体模型和足部模型;
[0045]
姿态传感器可以安装在人体的各个部位,获取各个部分的关节角度或各关节姿态,关节姿态是指人体部位包括躯干、左右大腿、小腿及左右脚的姿态,所述姿态包括rpy角、四元数形式,或其他形式的姿态数据。
[0046]
本实施例中人体模型采用人体运动学模型,具体为多杆运动学模型。
[0047]
如图2所示,足部模型为四个位置传递点的三角形结构。其中,足部模型的四个传递点坐标位置由四个参数确定:足尖系数l
t
,足跟系数l
h
,足高系数l
f
及虚拟传递点位置系数α。
[0048]
其构成的四个位置传递点在足部的局部位置坐标为:
[0049]
足跟:[
‑
l
h0‑
l
f
];足尖:[l
t0‑
l
f
];踝关节:[000];虚拟点:[α(p
to,x
‑
p
he,x
)+p
he,x
0p
to,z
]
[0050]
虚拟点的计算与足跟和足尖传递点有关,式中p
to,x
为足尖点x坐标,p
he,x
为足跟点x坐标,p
to,z
为足尖点z坐标。
[0051]
四个系数是固定的,根据普通人体的平均值确定。
[0052]
s2结合优化算法及标定调整足部模型参数,获得最佳足部模型,具体为:
[0053]
训练阶段:依照人体足部大致形状设立足部模型系数,设立虚拟传递点位置初始系数α,获取人体关节角度,输入足部模型,得到步态周期阶段;
[0054]
标定阶段:在地面设定两块测力板,在标定行走时分别两脚依次踏入两块不同的测力板,得到步态周期阶段;
[0055]
将模型得到步态阶段与测力板标定得到的步态阶段进行对比,对足部模型系数进行寻优,本实施例中寻优算法采用遗传算法。直到对比的误差最小。
[0056]
误差计算方法为
[0057][0058]
式中δ为运动学计算误差,t
ds,e
为实验测得双支撑开始时刻,t
ds,m
为模型计算双支撑开始时刻,t
de,e
为实验测得双支撑结束时刻,t
de,m
为模型计算双支撑结束时刻,c为步态周期时间。
[0059]
测力板得到步态阶段的方法为:若两个测力板监测力同时超过某阈值,则判定为双支撑阶段,否则为单支撑阶段。
[0060]
s3输入各关节姿态,得到当前的步态周期阶段。
[0061]
进一步,各关节姿态中,规定足底中的足跟、踝关节、虚拟点的z坐标不能小于0。若其任意点的z坐标等于零,则该点作为人体模型运动学的起始点进行计算。进一步地,步骤s3中,规定足底中的足跟、踝关节、虚拟点的z坐标不能小于0。若其任意点的z坐标等于零,则该点作为人体模型运动学的起始点进行计算。
[0062]
输入各关节姿态后,计算出四个位置传递点的地面坐标系下的位置坐标,按照以下方式判定单脚与地面关系:
[0063]
单脚触地时间:p
he,z
≤0
[0064]
单脚离地时间:p
to,z
>0
[0065]
双支撑阶段c
d
判定为
[0066]
c
st,i
=t
hs,i
‑
t
to,i
[0067]
c
d
=c
st,left
∩c
st,right
[0068]
式中t
hs,i
为某侧单脚离地起始时间,t
to,i
为某侧单脚触地起始时间。步态周期内,除去双支撑阶段的剩余周期阶段为单支撑阶段。
[0069]
实施例2
[0070]
一种行走步态周期阶段的判定方法,包括如下步骤:
[0071]
步骤s1,建立人体模型和足部模型。人体模型为二维七杆模型,足部模型初始参数为如下:【足尖系数l
t
】0.089*h,【足跟系数l
h
】0.041*h,【足高系数l
f
】0.039*h。h为人体高度,在本例中受试者高度为1.70m。
[0072]
步骤s2,设立初始虚拟传递点位置,结合优化算法和标定实验调整足部模型参数。虚拟传递点位置初始系数α=0.5。受试者通过动作捕捉系统获得各关节角度,通过测力板装置获得实验的双支撑阶段,进行计算并通过寻优调整四个系数,使得误差最小。本实施例中使用遗传算法寻优,其优化问题描述为:
[0073]
min∑δ
[0074]
s.t.0.01h≤l
t
≤0.20h
[0075]
0.01h≤l
h
≤0.10h
[0076]
0.01h≤l
f
≤0.10h
[0077]
0≤α≤1
[0078]
寻优标定后足部模型的相关系数为:足尖系数l
t
=0.068h,足跟系数l
h
=0.059h,足高系数l
f
=0.040h,虚拟传递点位置系数α=0.454。
[0079]
s3,输入各关节姿态,计算足部传递点位置,得到当前的步态周期阶段。进行三次步行实验,使用标定后的模型进行行走步态周期计算,并通过与测力板的结果进行对比。其相对误差分别为1.23%,1.58%,0.96%。图3(a)及图3(b)为第一次实验的测力板设备结果与步态周期结果判定方法的对比图。
[0080]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受所述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1