一种基于多视角轮廓图重建的蜜柚纵横径测量方法
1.本发明涉及一种蜜柚纵横径测量方法,尤其是涉及一种基于多视角轮廓图重建的蜜柚纵横径测量方法。
背景技术:
2.我国是世界上柚种植面积最大的国家,产量居世界第一。果形特征检测可以实现对水果外部品质进行分级,剔除畸形果。蜜柚的纵径及横径是果形的重要参数之一(gb/t 12947
‑
2008鲜柑橘),同时也是蜜柚外部品质分级的重要依据。传统人工测量方式耗时耗力,主观影响因素多,利用图像处理技术通过多视角轮廓重建测量蜜柚的纵横径,具有非接触、快速、无损等优势,对于蜜柚的外部品质分级具有重要的实际应用价值。
3.蜜柚纵横径尺寸的获取需要对蜜柚进行纵剖与横剖后测量,但该方法不仅会对蜜柚造成不可逆转的损伤,也无法满足蜜柚外部品质分级生产过程中无损快速的需求。
4.章文英等(2001)(章文英,应义斌.苹果图像的低层处理及尺寸检测[j].浙江农业学报,2001(04):38
‑
41.)利用链符法搜索并细化轮廓线后,利用最小外接矩形求苹果的纵径与横径,结果显示测量尺寸与实际尺寸相关系数达到了0.955。
[0005]
魏新华等(2011)(沈宝国,魏新华,尹建军.基于最小外接圆法的苹果直径检测技术[j].农机化研究,2011,33(12):131
‑
134.)对12个样本苹果采集了144幅图像,利用最小外接圆法测量苹果直径,拟合方程的相关系数达到了0.988。
[0006]
龚昌来等(2013)(龚昌来,罗聪,黄杰贤,杨冬涛.基于机器视觉的柚子尺寸检测系统的研究[j].农机化研究,2013,35(11):22
‑
25)利用单个彩色相机采集单幅柚果的整理图像,经过图像预处理后获得目标图像,采用逐行扫描的方式得到最上、最下、最左、最右四个边界点,利用机器视觉球状物体检测误差原理修正后得到横径的平均相对误差为2.43%,纵径的平均相对误差为2.30%。
[0007]
杨耀民(2016)(杨耀民.基于多轮廓图的马铃薯三维表面重建方法研究[d].浙江大学,2016.)利用多幅马铃薯不同姿态下的轮廓图合成了马铃薯三维骨架,同时探究了不同数量图片对曲面拟合形成马铃薯三维模型的影响。
[0008]
饶秀勤等(2018)(饶秀勤,高迎旺,宋晨波,应义斌,徐惠荣.一种基于轮廓图像的马铃薯三维建模方法[p].cn108053485 a,2018.05.18.)公开了一种基于轮廓图像的马铃薯三维建模方法,利用特征点形成骨架并最终建成三维模型,其体积相关系数达到了0.968。
[0009]
蜜柚多呈现上小下大的形状,与椭球相去甚远,传统的最小外接圆检测方法无法兼顾横径与纵径的精确度。
技术实现要素:
[0010]
为了解决背景技术中存在的问题和需求,本发明提供了一种基于多视角轮廓图重建的蜜柚纵横径测量方法。
[0011]
本发明的技术方案如下:
[0012]
本发明包括以下步骤:
[0013]
1)搭建图像采集系统:图像采集系统包括旋转置物平台、蜜柚、rgb相机、光照箱、数据传输线及主机;
[0014]
旋转置物平台、蜜柚及rgb相机均位于光照箱内,旋转置物平台上放置蜜柚,蜜柚随旋转置物平台的匀速旋转而转动,rgb相机置于旋转置物平台的一侧并且rgb相机的光轴指向蜜柚,rgb相机通过数据传输线与主机连接;
[0015]
2)建立世界坐标系:以旋转置物平台的旋转中心轴作为世界坐标系的x
w
轴,世界坐标系的z
w
轴与rgb相机光轴重合并指向rgb相机,世界坐标系的y
w
轴由右手坐标系确定;
[0016]
3)图像采集:旋转旋转置物平台,rgb相机等时间间隔采集多张当前蜜柚的原图像i;;
[0017]
4)蜜柚多视角轮廓图p获取:对多张当前蜜柚的原图像i均依次进行边缘检测、标记连通域、最大连通域求取以及坐标空间转换后获得蜜柚多视角轮廓图;
[0018]
5)蜜柚等间隔纬线获取;
[0019]
6)蜜柚横径求取:依次遍历n
‑
1条蜜柚等间隔纬线,计算各条蜜柚等间隔纬线的直径,将最大的直径作为当前蜜柚的最大横径;
[0020]
7)蜜柚纵轴拟合线获取;
[0021]
8)蜜柚纵径求取;
[0022]
9)畸形果判断:计算蜜柚纵轴拟合线l与竖直线的夹角θ,当夹角θ大于预设的阈值θ
d
时,当前蜜柚为畸形果,则当前蜜柚的最大横径和纵径长度记为负数;反之,则不变。
[0023]
所述步骤4)具体为:
[0024]
4.1)边缘检测:将一张原图像i转换为灰度图像g,再检测灰度图像g的边缘轮廓,得到含噪边缘轮廓图像e
′
;
[0025]
4.2)标记连通域:遍历含噪边缘轮廓图像e
′
的各个像素点,对于任一像素点,按照该像素的8领域检测其余像素点与该像素点的连通性,符合8连通的区域标记为同一个连通域,获得各个连通域;
[0026]
4.3)最大连通域求取:遍历各个连通域,求取出最大的连通域并将该最大的连通域保存为边缘轮廓图像e;
[0027]
4.4)坐标空间转换;对边缘轮廓图像e的各个像素点进行坐标空间转换,获得坐标转换后的边缘轮廓图像f;对于边缘轮廓图像e中的任一像素点(x,y),绕旋转置物平台的旋转轴旋转得到该像素点的三维空间点坐标(x
w
,y
w
,z
w
),通过以下公式进行坐标转换:
[0028]
x
w
=x
[0029]
y
′
=y
‑
y0[0030]
y
w
=y
′
*cos(θ)
‑
z*sin(θ)
[0031]
z
w
=y
′
*sin(θ)+z*cos(θ)
[0032]
其中,x代表像素点(x,y)的横坐标值,y代表像素点(x,y)的纵坐标值,y0代表当前边缘轮廓图像e的竖直对称轴,y
′
代表像素点(x,y)的旋转前的纵坐标值,θ代表采集当前边缘轮廓图像e对应的原图像i时旋转置物平台转过的角度;
[0033]
4.5)迭代求取多视角轮廓图:对剩余的原图像i重复步骤4.1)至步骤4.4),获得所
有原图像i的坐标转换后的边缘轮廓图像f,将所有坐标转换后的边缘轮廓图像f进行组合后得到蜜柚多视角轮廓图p。
[0034]
所述步骤5)具体为:
[0035]
在区间[minx
w
,maxx
w
]之间对蜜柚多视角轮廓图p进行n等分,其中minx
w
表示蜜柚多视角轮廓图p中最小的x
w
轴坐标值,maxx
w
表示蜜柚多视角轮廓图p中最大的x
w
轴坐标值,获得n
‑
1个蜜柚等间隔切面,n
‑
1个蜜柚等间隔切面与蜜柚多视角轮廓图p之间产生交点,利用最小外接圆拟合同一蜜柚等间隔切面与蜜柚多视角轮廓图p之间产生交点,获得n
‑
1条蜜柚等间隔纬线,获得蜜柚多视角纬线轮廓图q;
[0036]
所述步骤7)具体为:
[0037]
7.1)对于第i条蜜柚等间隔纬线l
i
,第i条蜜柚等间隔纬线的圆心o
i
的x
w
坐标值x
wi
通过以下公式计算获得:
[0038][0039]
其中,floor表示向下取整函数,(i=1,2,...,n
‑
1);
[0040]
7.2)对n
‑
1条蜜柚等间隔纬线重复步骤7.1),得到n
‑
1个蜜柚等间隔纬线的圆心,利用直线拟合后得到蜜柚纵轴拟合线l。
[0041]
所述步骤8)具体为:
[0042]
8.1)平均距离判别:在蜜柚多视角纬线轮廓图q中,计算蜜柚纵轴拟合线l在区间[minx
w
,maxx
w
]的所有点的轮廓线平均距离;对于蜜柚纵轴拟合线l上的任一点p
i
,求取点p
i
至半径阈值r
d
范围内的蜜柚轮廓线上各点之间的距离的平均值记为点p
i
的轮廓线平均距离meand
i
,其中蜜柚轮廓线由蜜柚多视角纬线轮廓图q中的多视角边缘轮廓线及蜜柚等间隔纬线共同组成;
[0043]
8.2)标记纵轴顶点与纵轴底点:根据设置的距离阈值p
d
,对所有点的轮廓线平均距离进行判断标记后,获得纵轴顶点集与纵轴底点集,其中纵轴顶点集与纵轴底点集中的所有点的轮廓线平均距离大于零且小于等于距离阈值p
d
,再从纵轴顶点集中选择x
w
轴坐标值最大的点作为纵轴顶点,从纵轴底点集中选择x
w
轴坐标值最小的点作为纵轴底点;
[0044]
8.3)求取蜜柚纵径:求取纵轴顶点与纵轴底点两点间的欧式距离并作为当前蜜柚的纵径长度。
[0045]
本发明的有益效果为:
[0046]
本发明能够避免对于蜜柚的损伤,做到省时省力;同时利用多视角轮廓图可以进一步解决基于单张图像测量蜜柚纵横径受采集视角影响的局限性,从而为蜜柚在外部品质分级方面提供更加科学客观的纵横径果形参数。
[0047]
本发明基于蜜柚轮廓图进行等间隔面切分及等间隔纬线拟合获得蜜柚的横径,提出了通过拟合等间隔纬线的圆心并判别后得到蜜柚纵径的方法。
附图说明
[0048]
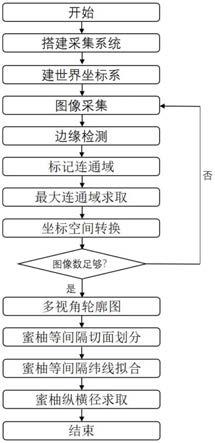
图1是本发明的整体流程图。
[0049]
图2是本发明的图像采集系统布置图。
[0050]
图3是本发明的原图像。
[0072]
y
w
=y
′
*cos(θ)
‑
z*sin(θ)
[0073]
z
w
=y
′
*sin(θ)+z*cos(θ)
[0074]
其中,(x,y)代表当前边缘轮廓图像e中的任一像素点的像素坐标,x代表像素点(x,y)的横坐标值,y代表像素点(x,y)的纵坐标值,y0代表当前边缘轮廓图像e的竖直对称轴,y
′
代表像素点(x,y)的旋转前(即旋转置物平台1的初始状态时)的纵坐标值,θ代表采集当前边缘轮廓图像e对应的原图像i时旋转置物平台1转过的角度,(x
w
,y
w
,z
w
)代表像素点(x,y)旋转后的三维空间点坐标;
[0075]
4.5)迭代求取多视角轮廓图:对剩余的原图像i重复步骤4.1)至步骤4.4),获得所有原图像i的坐标转换后的边缘轮廓图像f,本实施例中蜜柚的采集设置为连续获取36张当前蜜柚的原图像。将所有坐标转换后的边缘轮廓图像f进行组合后得到蜜柚多视角轮廓图p,如图6所示;
[0076]
5)蜜柚等间隔纬线获取:沿着x
w
轴方向在区间[minx
w
,maxx
w
]之间对蜜柚多视角轮廓图p进行n等分,其中minx
w
表示蜜柚多视角轮廓图p中最小的x
w
轴坐标值,maxx
w
表示蜜柚多视角轮廓图p中最大的x
w
轴坐标值,获得n
‑
1个蜜柚等间隔切面,n
‑
1个蜜柚等间隔切面与蜜柚多视角轮廓图p之间产生交点,利用最小外接圆拟合同一蜜柚等间隔切面与蜜柚多视角轮廓图p之间产生交点,获得n
‑
1条蜜柚等间隔纬线,获得蜜柚多视角纬线轮廓图q;本实施例均分为27条纬线,即n=28,如图7所示。
[0077]
6)蜜柚横径求取:依次遍历蜜柚多视角纬线轮廓图q中的n
‑
1条蜜柚等间隔纬线,计算各条蜜柚等间隔纬线的直径,将最大的直径作为当前蜜柚的最大横径;
[0078]
7)蜜柚纵轴拟合线获取:
[0079]
步骤7)具体为:
[0080]
7.1)对于第i条蜜柚等间隔纬线l
i
,其圆心坐标为o
i
(x
wi
,y
wi
,z
wi
),第i条蜜柚等间隔纬线的圆心o
i
的x
w
坐标值x
wi
通过以下公式计算获得:
[0081][0082]
其中,floor表示向下取整函数,(i=1,2,...,n
‑
1);
[0083]
7.2)对n
‑
1条蜜柚等间隔纬线重复步骤7.1),得到n
‑
1个蜜柚等间隔纬线的圆心,利用直线拟合后得到蜜柚纵轴拟合线l;
[0084]
8)蜜柚纵径求取:
[0085]
步骤8)具体为:
[0086]
8.1)平均距离判别:在蜜柚多视角纬线轮廓图q中,计算蜜柚纵轴拟合线l在沿着x
w
轴方向的区间[minx
w
,maxx
w
]的所有点的轮廓线平均距离;对于蜜柚纵轴拟合线l上的任一点p
i
,求取点p
i
至半径阈值r
d
范围内的蜜柚轮廓线上各点之间的距离的平均值记为点p
i
的轮廓线平均距离meand
i
,其中蜜柚轮廓线由蜜柚多视角纬线轮廓图q中的多视角边缘轮廓线及蜜柚等间隔纬线共同组成;
[0087]
8.2)标记纵轴顶点与纵轴底点:根据设置的距离阈值p
d
,对所有点的轮廓线平均距离进行判断标记后,获得纵轴顶点集与纵轴底点集,其中纵轴顶点集与纵轴底点集中的所有点的轮廓线平均距离大于零且小于等于距离阈值p
d
,再从纵轴顶点集中选择x
w
轴坐标值最大的点作为纵轴顶点,从纵轴底点集中选择x
w
轴坐标值最小的点作为纵轴底点;若
meand
i
=0,表示点p
i
紧靠蜜柚中心位置(如p1点)或远离蜜柚轮廓线(如p2点),既该点附近无蜜柚轮廓线,不标记p
i
;若meand
i
>p
d
,表示点p
i
距离蜜柚轮廓线较近(如p3点),不标记点p
i
;若0<meand
i
≤p
d
,则保存最小的meand
i
所对应的p
i
点,表示该点位于蜜柚轮廓线表面(如p4点),共标记纵轴顶点与纵轴底点两个点;示意图如图8所示;
[0088]
8.3)求取蜜柚纵径:求取纵轴顶点与纵轴底点两点间的欧式距离并作为当前蜜柚的纵径长度;
[0089]
9)畸形果判断:计算蜜柚纵轴拟合线l与竖直线的夹角θ,当夹角θ大于预设的阈值θ
d
时,当前蜜柚为畸形果,则当前蜜柚的最大横径和纵径长度记为负数;反之,则不变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1