一种基于边缘检测的加香喷雾性能检测方法与流程
1.本发明涉及计算机视觉技术领域,尤其涉及一种基于边缘检测的加香喷雾性能检测方法。
背景技术:
2.烟丝加香是卷烟厂烟丝制造生产线(简称制丝线)的三大工艺环节之一,所谓烟丝加香就是根据制丝线上烟丝流量进行均匀喷香。评判一种加香喷嘴性能的优劣最主要的质量指标就是喷雾质量指标,喷嘴装置的雾化性能与加香的效果关系最为密切。首先是雾滴的大小,粒谱范围,雾滴的均匀度,其次就是雾滴从喷嘴喷出的射程与流量,以及雾滴在空中的悬浮时间等,如果喷嘴喷出的雾滴粗大、射程小而很快落地,则加香效果差而且容易造成对物料的浪费。
3.烟丝加香喷嘴喷雾质量的优劣将直接影响到烟丝与香料混合的充分程度和最终效果。目前加香喷雾性能检测方法均是由人工在现场观察,然而人工观察会造成喷雾雾滴场的干扰与破坏,工作人员的工作量巨大,在喷雾质量出现明显变差的情况时工作人员也不可能实时了解到。
技术实现要素:
4.本发明提供了一种基于边缘检测的加香喷雾性能检测方法,以解决上述问题。
5.本发明的目的是在加香喷嘴喷雾时利用高速摄像机对其进行拍摄,同步传送到工控机使用设计的算法对拍摄到的时序喷雾图片进行图像处理,并检测喷雾中的各大小颗粒在总体颗粒数中所占的比率,依此进行对喷雾质量的评判与分析,后续可以将评估结果反馈到喷嘴控制系统,对喷嘴装置进行调整,保证香料喷雾与烟丝搅拌时的持续性高质量。
6.本发明采用的技术方案是:提供一种基于边缘检测的加香喷雾性能检测方法,包括以下步骤:
7.步骤一、为了获得清楚的雾滴分布信息,采用高速图像采集系统对基于时间序列喷雾图像进行采集;
8.步骤二、利用数字图像处理技术对喷雾图像进行图像格式处理,得到特征明显的处理后喷雾图像并保存;
9.步骤三、将步骤二中获取的图像输入边缘检测层,对一组时序图像的雾滴形态特征进行提取分析,识别图像上的雾化颗粒轮廓;
10.步骤四、将步骤三中检测到的颗粒轮廓通过分析计算其截面积,按照颗粒截面积的大小范围进行归类处理,并计算各面积大小范围内的颗粒数量在整体数量中所占的比例;
11.步骤五、重复执行步骤二到步骤四,直到基于时间序列喷雾图像帧处理并分析完毕。
12.作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,实时数字图像处理
技术包括图像格式变换、图像灰度化、图像二值化、图像增强处理。
13.作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,所述步骤二中对图像进行的图像格式处理的方法选用基于opencv在python中的实现,主要包括以下步骤:
14.步骤i、调用opencv库中的cvtcolor()函数,并输入cv2.color_bgr2gray对图像进行灰度化处理,使得三通道彩色图转化为单通道灰度图;
15.步骤ii、调用opencv库中的gaussianblur()函数,使用高斯平滑滤波器进行处理,使得整个图像过渡均匀平滑,去除细节,过滤掉高斯噪声;
16.步骤iii、调用opencv库中的medianblur()函数,使用中值滤波器进行处理,采用非线性的方法,有效地平滑脉冲噪声,保护图像尖锐的边缘,过滤掉椒盐噪声;
17.步骤iv、使用canny边缘检测器检测边缘,并将梯度方向设置在图像的x方向上,所述x方向为当前图像平面的水平朝右方向;
18.步骤v、调用opencv库中的getstructuringelement()函数,为之后的形态学操作获取结构化元素;
19.步骤vi、调用opencv库中的dilate()和erode()函数,分别对图像进行膨胀
‑
腐蚀
‑
膨胀操作,平滑图像边缘。
20.作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,步骤iv中采用scharr算子代替canny边缘检测器。
21.作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,所述步骤三中检测雾滴形态特征方法采用边缘检测法,当有运动目标进入高速图像采集系统中的相机拍摄区域时,实时的图像会和既定的背景图像产生不一致,经过处理提取运动目标的信息。
22.作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,所述步骤三中识别图像上的雾化颗粒轮廓方法包括以下步骤:
23.步骤1、去噪,使用5
×
5的高斯滤波器平滑预处理后的图像;
24.步骤2、梯度计算,计算图像中每个像素强度的梯度以及梯度方向,如式1所示:
[0025][0026]
其中,g
x
表示当前像素点在x方向的强度变化率,g
y
表示当前像素点在y方向的强度变化率,angle(θ)表示当前像素点相对其他像素点强度变化角度;
[0027]
步骤3、八领域校核:将图像以3
×
3邻域分割,再将邻域中的像素点按一定顺序逐个判断校核,将雾滴与背景图像分离出来;
[0028]
步骤4、非极大值抑制:选取梯度值最高的像素作为边;
[0029]
步骤5、迟滞阈值化:设定一个梯度的阈值范围,即一个高阈值一个低阈值;
[0030]
任何梯度值高于高阈值的像素都认定为一个边缘,任何梯度值低于低阈值认定该值的像素绝对不是边缘;
[0031]
检查位于两个阈值之间所有梯度的像素,如果它们和边缘相连,就会留下,否则就会去掉。
[0032]
作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,所述八领域校核方
法如下:
[0033]
步骤i、在初次分割的背景点与组成的规则格网里,选择最左上方作为第一个待判断点,点p为待判断点,周围八邻域点分别记作点1至点8,建立3
×
3的数组b,把待判断点和八邻域上的高程值放入其中,各个点高程值记作h
p
,h1~h8;
[0034]
步骤ii、把单元格网的宽度记做单位1,每个单元格网的对角线长为以划分邻域中心点p为中心,可以求得点2p6,点4p8,点1p5,点3p7所在4个方向上的梯度差分,分别记作d1,d2,d3,d4,2p6为点2经点p到点6方向,各个点集所在方向上的高程值梯度差分可分别表示为:
[0035]
d1=|(h
p
‑
h2)
‑
(h6‑
h
p
)|=|2h
p
‑
h2‑
h6|
ꢀꢀꢀꢀ
(式2);
[0036]
d2=|(h
p
‑
h4)
‑
(h8‑
h
p
)|=|2h
p
‑
h4‑
h8|
ꢀꢀꢀꢀ
(式3);
[0037][0038][0039]
步骤iii、设定一个梯度差分阈值dtho,与点p周围4个给定方向的梯度差分值d1,d2,d3,d4进行比较,当4个梯度差分值同时小于dtho时,则提取为雾滴,否则为背景点;
[0040]
步骤iiii、按左右上下顺序搜索下一个相邻点作为待判断点,重复步骤i到iii,直到所有点处理完。
[0041]
作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,所述步骤四包括以下步骤:
[0042]
步骤i、雾滴面积计算;
[0043]
设雾滴图像大小为m
×
n,雾滴在图像中的像素标签号为f
i
(x,y),则第i个雾滴面积的计算公式为:
[0044][0045]
一帧图像中共k个雾滴,则图像中的雾滴总面积计算公式为:
[0046][0047]
步骤ii、雾滴当量直径的计算;
[0048]
雾滴的当量直径是假设雾滴在图像中的投影面为规则的圆时的直径,雾滴的当量直径根据雾滴的面积求得,具体关系如式8所示:
[0049][0050]
作为基于边缘检测的加香喷雾性能检测方法的一种优选方式,所述步骤一中进行的采集图像的高速相机为basler a2a1920
‑
160umpro usb3.0超高速相机,以20帧/秒速度进行图像采集。
[0051]
本发明的有益效果是:本发明基于高速图像采集与处理的喷雾质量评价系统可以避免对喷雾雾滴场的干扰与破坏,减轻工作人员的工作量,降低因人工检测带来的误差,并缩短检测周期。
附图说明
[0052]
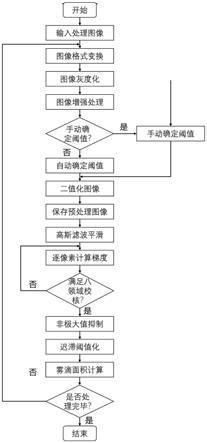
图1为本发明公开的基于边缘检测的加香喷雾性能检测方法的流程示意图。
[0053]
图2a为本发明公开的八领域校核的示意图;
[0054]
图2b为八邻域校核的4个方向示意图。
具体实施方式
[0055]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步详细描述,但本发明的实施方式不限于此。
[0056]
实施例1:
[0057]
本发明在加香喷嘴喷雾时利用高速摄像机对其进行拍摄,同步传送到工控机使用设计的算法对拍摄到的时序喷雾图片进行图像处理,并检测喷雾中的各大小颗粒在总体颗粒数中所占的比率,依此进行对喷雾质量的评判与分析,后续可以将评估结果反馈到喷嘴控制系统,对喷嘴装置进行调整,保证香料喷雾与烟丝搅拌时的持续性高质量。
[0058]
参见图1,一种基于边缘检测的加香喷雾性能检测方法,包括以下步骤:
[0059]
步骤一、为了获得清楚的雾滴分布信息,采用高速图像采集系统对基于时间序列喷雾图像进行采集;采集图像的高速相机为basler a2a1920
‑
160umpro usb3.0超高速相机,以20帧/秒速度进行图像采集。
[0060]
步骤二、利用数字图像格式变换、图像灰度化、图像二值化、图像增强处理等数字图像处理技术对喷雾图像进行图像格式处理,得到特征明显的处理后喷雾图像并保存。
[0061]
步骤三、将步骤二中获取的图像输入边缘检测层,对一组时序图像的雾滴形态特征进行提取分析,识别图像上的雾化颗粒轮廓。
[0062]
步骤四、将步骤三中检测到的颗粒轮廓通过分析计算其截面积,按照颗粒截面积的大小范围进行归类处理,并计算各面积大小范围内的颗粒数量在整体数量中所占的比例。
[0063]
步骤五、重复执行步骤二到步骤四,直到基于时间序列喷雾图像帧处理并分析完毕。
[0064]
进一步的,所述步骤二中对图像进行的图像格式处理的方法选用基于opencv在python中的实现,主要包括以下步骤:
[0065]
步骤i、调用opencv库中的cvtcolor()函数,并输入cv2.color_bgr2gray对图像进行灰度化处理,使得三通道彩色图转化为单通道灰度图。
[0066]
步骤ii、调用opencv库中的gaussianblur()函数,使用高斯平滑滤波器进行处理,使得整个图像过渡均匀平滑,去除细节,过滤掉高斯噪声。
[0067]
步骤iii、调用opencv库中的medianblur()函数,使用中值滤波器进行处理,采用非线性的方法,有效地平滑脉冲噪声,保护图像尖锐的边缘,过滤掉椒盐噪声。
[0068]
步骤iv、使用canny边缘检测器检测边缘,并将梯度方向设置在图像的x方向上,所述x方向为当前图像平面的水平朝右方向。
[0069]
步骤v、调用opencv库中的getstructuringelement()函数,为之后的形态学操作获取结构化元素。
[0070]
步骤vi、调用opencv库中的dilate()和erode()函数,分别对图像进行膨胀
‑
腐
蚀
‑
膨胀操作,平滑图像边缘。该步骤还可以中采用scharr算子代替canny边缘检测器,两者的计算量和计算速度是一样的,但scharr算子准确度更高,在梯度检测中用的更多。
[0071]
进一步的,步骤三中检测雾滴形态特征方法采用边缘检测法,当有运动目标进入高速图像采集系统中的相机拍摄区域时,实时的图像会和既定的背景图像产生不一致,经过处理提取运动目标的信息。
[0072]
进一步的,所述步骤三中识别图像上的雾化颗粒轮廓方法包括以下步骤:
[0073]
步骤1、去噪,使用5
×
5的高斯滤波器平滑预处理后的图像;
[0074]
具体的,因为这种方法依赖于强度的突然变化,如果图像有很多随机噪声,则会将噪声边界作为检测到的颗粒图像边缘,所以本方法将使用5
×
5的高斯滤波器平滑预处理后的图像。
[0075]
步骤2、梯度计算,计算图像中每个像素强度的梯度(即强度变化率)以及梯度方向,如式1所示:
[0076][0077]
其中,g
x
表示当前像素点在x方向(即水平方向)的强度变化率,g
y
表示当前像素点在y方向(即水平方向)的强度变化率,angle(θ)表示当前像素点相对其他像素点强度变化角度;
[0078]
步骤3、八领域校核:将图像以3
×
3邻域分割,再将邻域中的像素点按一定顺序逐个判断校核,将雾滴与背景图像分离出来;
[0079]
步骤4、非极大值抑制:选取梯度值最高的像素作为边;
[0080]
步骤5、迟滞阈值化:设定一个梯度的阈值范围,即一个高阈值一个低阈值;
[0081]
任何梯度值高于高阈值的像素都认定为一个边缘,任何梯度值低于低阈值认定该值的像素绝对不是边缘;
[0082]
检查位于两个阈值之间所有梯度的像素,如果它们和边缘相连,就会留下,否则就会去掉。
[0083]
进一步的,所述八领域校核方法如下:
[0084]
步骤i、在初次分割的背景点与组成的规则格网里,选择最左上方作为第一个待判断点,点p为待判断点,周围八邻域点分别记作点1至点8,建立3
×
3的数组b,把待判断点和八邻域上的高程值放入其中,各个点高程值记作h
p
,h1~h8;
[0085]
步骤ii、由几何知识可知,每个方向上的梯度差分可以由这个方向上的梯度值相减求得。点p与点2、点4、点6、点8垂直映射到x轴的点之间的距离为正方形单元网格的边长,点p与点1、点3、点5、点7的垂直映射到x轴的点之间的距离为正方形单元网格的对角线长。为便于计算,把单元格网的宽度记做单位1,每个单元格网的对角线长为以划分邻域中心点p为中心,可以求得点2p6,点4p8,点1p5,点3p7所在4个方向上的梯度差分,分别记作d1,d2,d3,d4,2p6为点2经点p到点6方向,各个点集所在方向上的高程值梯度差分可分别表示为:
[0086]
d1=|(h
p
‑
h2)
‑
(h6‑
h
p
)|=|2h
p
‑
h2‑
h6|
ꢀꢀꢀꢀ
(式2);
[0087]
d2=|(h
p
‑
h4)
‑
(h8‑
h
p
)|=|2h
p
‑
h4‑
h8|
ꢀꢀꢀꢀ
(式3);
[0088][0089][0090]
步骤iii、设定一个梯度差分阈值dtho,与点p周围4个给定方向的梯度差分值d1,d2,d3,d4进行比较,当4个梯度差分值同时小于dtho时,该点提取为雾滴,否则为背景点;
[0091]
步骤iiii、按左右上下顺序搜索下一个相邻点作为待判断点,重复步骤i到iii,直到所有点处理完。
[0092]
进一步的,所述步骤四包括以下步骤:
[0093]
步骤i、雾滴面积计算;
[0094]
设雾滴图像大小为m
×
n,雾滴在图像中的像素标签号为f
i
(x,y),则第i个雾滴面积的计算公式为:
[0095][0096]
一帧图像中共k个雾滴,则图像中的雾滴总面积计算公式为:
[0097][0098]
步骤ii、雾滴当量直径的计算;
[0099]
雾滴的当量直径是假设雾滴在图像中的投影面为规则的圆时的直径,雾滴的当量直径根据雾滴的面积求得,具体关系如式8所示:
[0100][0101]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1