考虑不确定性推理的有机气体泄漏扩散实时智能预警方法
1.本发明属于油气泄漏事故防控技术,具体地说是考虑不确定性推理的有机气体泄漏扩散实时智能预警方法。
背景技术:
2.石油化工产业是我国国民经济的支柱产业。无论是海洋还是陆地石化领域,石化装置在化石资源生产、转化及使用等各个环节均扮演重要角色。然而,石化装置储存大量易燃易爆、有毒危险化学品,面临潜在危化品泄漏风险。危化品泄漏具有危害性高、突发性强、连锁性及应急处理难度大等特点。倘若没有油气泄漏扩散应急响应及决策机制,较易发生泄漏可燃气云被点燃发生燃爆事故,并且燃爆压力能够在拥塞的障碍下升级,最终导致设备的严重受损及人员的严重伤亡。
3.在给定场景相关变量(如释放率、风速、时间等)的情况下,对油气扩散进行建模是支持实时应急响应计划和决策过程的关键。理想情况下,全面的实验测试是最可靠的方法,然而,由于其高成本和高风险,这一方法很难实现。计算流体力学(cfd)已被广泛应用于精确模拟各种气体在不同空间范围内的扩散行为。然而,基于cfd的建模方法计算量很大,时间成本较高,这使得它们不适用于实时应急响应环境。
4.鉴于油气开发及处理过程中的事故危险性及环境破坏性,目前亟需开展油气扩散风险分析方法的研究,为油气燃爆危险性评价提供评估方法,为应急响应机制的建立以及油气处理系统的安全运行提供技术保障,因此,本发明提供一种考虑不确定性推理的有机气体泄漏扩散实时智能预警方法,更全面、更合理地估计扩散气体覆盖的危险区域,保障油气处理系统的安全运行。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种考虑不确定性推理的有机气体泄漏扩散实时智能预警方法。
6.考虑不确定性推理的有机气体泄漏扩散实时智能预警方法,所述预警方法包括以下步骤:
7.步骤1、基于flacs,建立油气扩散数值模型,根据所建立的油气扩散数值模型结合研究对象的油气处理系统所在区域的通风情况,开展通风数值模拟;
8.步骤2、以通风数值模拟结果为基础,开展典型扩散场景i下的扩散模拟,获取典型扩散场景i下不同时刻气体浓度数据集x:
[0009][0010]
式中,n1是扩散场景的数量,n2是与扩散场景相关变量的数量,n3和n4表示在任何特定时间t内由研究域长度x、宽度y和高度h三个维度中的任意两个维度组成的方向矩阵的
维数;
[0011]
步骤3、将具有高维时空特征的气体浓度数据集x通过conv-vae无监督模型耦合算法降维至具有连续分布特征的低维度潜在空间变量z,构建具有不确定性分布特征的气体浓度概率分布p(x),计算表示如下:
[0012]
p(x)=∫p(x|z)p(z)dz,z~p(z|x)
ꢀꢀꢀ
(2)
[0013]
式中,p(z)为潜在空间变量z的分布,其中z的分布服从卷积概率编码器p(z|x);
[0014]
通过conv-vae无监督模型耦合算法构建卷积概率编码器p
θ
(z|x),θ为p
θ
(z|x)对应潜在空间变量z的分布参数、每个θ对应一个具有特定分布的z,通过输入步骤2中公式(1)的气体浓度数据集x,计算n1个扩散场景下具有连续分布特征的nz维潜在空间变量z,计算表示如下:
[0015][0016]
构建卷积概率解码器p
θ
(x|z),低维的潜在空间变量z通过解码器p
θ
(x|z)升维生成具有与对应气体浓度x具有相同时空分布特征的气体浓度数据x
′
,计算表示如下:
[0017][0018]
式中,nz代表潜在空间的维数、表征潜在空间大小,是变分参数;代表潜在空间变量z的第nz维度,为气体浓度数据集x经过具有变分参数的编码器encoder后转换为具有nz维的潜在空间变量z,为将潜在空间变量经过decoder再转换为气体浓度数据集x
′
;
[0019]
步骤4:构建输入典型扩散场景i和潜在空间变量z之间的概率密度p(z|i)的映射关系,将(i,z)作为训练数据集及标签,假定权重w遵循密度分布p(w|z,i),通过vbnn开展有监督学习确定权重w,将权重w作为最优化变分参数χ,建立典型扩散场景i和潜在空间变量z之间的概率密度映射关系p(z|i);
[0020]
步骤5:将vbnn有监督的学习模型与conv-vae无监督模型耦合算法模型的解码器部分相结合,建立考虑不确定性推理的有机气体泄漏扩散实时在线智能预警模型,在线智能预警模型通过给定与扩散场景i有关的参数,以实现对扩散浓度x的概率时序预测p(x|i);
[0021]
根据步骤3中构建的卷积概率解码器p(x|z)以及步骤4中构建的映射关系p(z|i),构建考虑不确定性推理的有机气体泄漏扩散实时在线智能预警模型p(x|i):
[0022]
p(x|i)=∫p(x|z)p(z|i)dz,z~p(z|i)and i=f-1
(x)
[0023]
式中,z为潜在空间变量。
[0024]
进一步地,所述的步骤3中卷积概率解码器p
θ
(x|z)构建过程使用适用于深度学习的变分贝叶斯推理,具体详细过程如下:
[0025]
第一步:引入变分分布逼近代替卷积概率编码器p
θ
(z|x),通过求解变分分布与卷积概率编码器p
θ
(z|x)两者之间的kl散度的最小值使得能够逼近代替p
θ
(z|x),kl散度表示如下:
[0026]
[0027]
式中,p(x)为气体浓度数据集x对应的概率分布,为证据下界,为和p
θ
(z|x)之间的kl散度,θ是权重、偏差,其中的潜在空间变量z可参数化为z=μ+σ*ε(ε~n(0,1)),代表潜在空间变量z的特征值,即均值、偏差;
[0028]
不确定性分布特征的气体浓度概率分布p(x)为气体浓度数据集x对应的概率分布,logp(x)对于每个确定气体浓度是固定的,因此求解kl散度最小值可变为求解证据下界最大值;
[0029]
第二步:对第一步中的公式(5)中证据下界进行变形处理,在conv-vae无监督模型耦合算法模型中,计算为:
[0030][0031]
式中,为与p
θ
(z)的kl散度,为重构损失,p
θ
(z)为潜在空间变量z对应的概率分布;
[0032]
假设p
θ
(z)为中心各向同性高斯分布并且是具有对角协方差结构的多元高斯分布,进一步表示为:
[0033][0034]
式中,j为训练次数;σj代表第j次训练的方差;μj代表第j次训练的均值,x'为对应气体浓度x具有相同时空分布特征的气体浓度数据;
[0035]
第三步:确定变分分布及conv-vae模型中编码器卷积层输出,最大化第二步中的式(7)中证据下界使用变分分布逼近替代p
θ
(z|x),同时将最大化对应的μ和ε作为conv-vae编码器中卷积层的输出;
[0036]
第四步:根据μ和ε,确定编码器和解码器p
θ
(x|z),通过编码器输入公式(1)的气体浓度x来计算n1个扩散场景下具有nz维的潜在空间变量z矩阵,计算表示如下:
[0037][0038]
低维度潜在空间变量z可以通过解码器p
θ
(x|z)升维生成具有与对应气体浓度x具有相同时空分布特征的气体浓度数据x
′
,计算可以表示如下:
[0039][0040]
第五步:确定具有不确定性分布特征的气体浓度概率分布p(x),潜在空间变量z的概率分布p(z),特征分布参数为θ,通过第三步θ的确定,可以获得具有特定分布的p(z),即p
θ
(z),结合解码器p
θ
(x|z),得到具有不确定性分布特征的气体浓度概率分布p(x)。
[0041]
进一步地,所述步骤4的具体详细过程如下:
[0042]
第一步:对概率密度p(w|z,i)权重建模,引入变分分布q(w|χ)逼近代替p(w|z,i),求解变分分布q(w|χ)与p(w|z,i)两个分布之间的kl散度的最小值,使得q(w|χ)能够逼近代替p(w|z,i),其中,证据下界elbo(χ,z,i)表示为:
[0043]
elbo(χ,z,i)=-d
kl
(q(w|χ)||p(w))+e
q(w|z,i)
[logp(z|i,w)]
ꢀꢀꢀ
(8)
[0044]
式中,χ代表需要优化的变分参数,p(w|z,i)为在z、i确定条件下对应w的概率分布密度;
[0045]
第二步:设vbnn模型的输出预测值为zpred,因此zpred概率密度分布与z相同,服从p(z|w,i),对公式(8)中e
q(w|z,i)
[logp(z|i,w)]进行变形处理,可表示为:
[0046][0047]
式中,σz为手动给出的噪声方差;
[0048]
第三步:确定变分分布q(w|χ),最大化公式(8)中elbo(χ,z,i),使用变分分布q(w|χ)逼近替代p(w|z,i),同时,通过最大化公式(8)中elbo(χ,z,i),得到与之对应的最优变分参数χ;
[0049]
第四步:根据最优变分参数χ以及使用q(w|χ)代替p(w|z,i),概率密度p(z|i)表示为:
[0050]
p(z|i)=∫p(z|i,w)q(w|χ)dw
ꢀꢀꢀ
(10)
[0051]
第五步:采用核密度估计法对概率密度p(z|i)进行估计,应用蒙特卡罗抽样生成多个关于z的预测值,具体表示如下:
[0052][0053]
式中,m是蒙特卡罗样本数,wm表示第m组的权重与偏差,zm表示第m个潜在空间分布变量;
[0054]
构建出在给定wm的情况下,输入典型扩散场景i和潜在空间变量z之间的概率密度映射关系p(z|i)。
[0055]
进一步地,所述的步骤2中扩散场景相关的变量的数量n2为释放速率、风向和时间。
[0056]
进一步地,所述典型扩散场景i为具有3~4维特征,且3~4维特征的i与具有超高维特征的x相关联。
[0057]
有益效果:本发明提出了一种考虑不确定性推理的有机气体泄漏扩散实时在线智能预警方法。该方法以有监督和无监督的方式将高维空间特征的分布与低维点进行关联,在预测扩散气体空间浓度的同时,能够附加对扩散气体空间浓度的不确定性估计,具有良好的泛化能力,有助于更全面、更合理地估计扩散气体覆盖的危险区域;同时,相比cfd模型大量的计算时间成本,考虑不确定性推理的有机气体泄漏扩散实时在线智能预警模型计算时间小于1s,具有良好的实时应用潜力。总体而言,本发明提出的考虑不确定性推理的有机气体泄漏扩散实时在线智能预警模型是构建应急管理数字孪生体系的合适备选方案,有助于油气处理系统的安全运行。
附图说明
[0058]
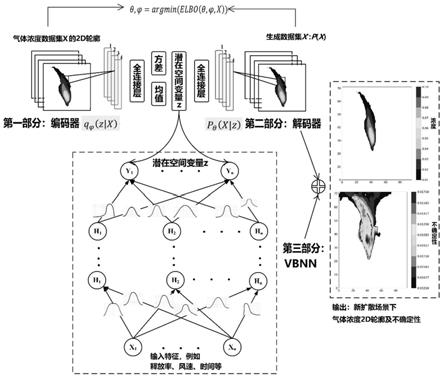
图1为考虑不确定性推理的有机气体泄漏扩散实时在线智能预警方法的主要流程图;
[0059]
图2为vbnn模型代表性结构图。
具体实施方式
[0060]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明,即所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0061]
一种考虑不确定性推理的有机气体泄漏扩散实时智能预警方法,具体包括以下步骤:
[0062]
步骤1、基于flacs,建立油气扩散数值模型,结合研究对象的油气处理系统所在区域的通风情况,开展通风数值模拟;
[0063]
步骤2:以通风模拟结果为基础,开展典型扩散场景i下的扩散模拟,以获取典型扩散场景下不同时刻气体浓度数据x。
[0064][0065]
式中,n1是扩散场景的数量,n2是与扩散场景相关的变量的数量,例如释放速率、风向、时间等。n3和n4表示在任何特定时间t的研究域的长度x、宽度y和高度h中任意两个方向的矩阵维数,例如,在5m*5m的范围内,如果计算网格单位是1m,那么n3=5,n4=5;如果计算网格单位是0.5m,那么n3=10,n4=10。in下标代表的就是维度参数,有n1、n2、n3、n4,代表有四个维度参数。xmn的含义,如上文说,n3和n4代表的是长度x、宽度y和高度h三个方向中任意两个方向的矩阵维数。比如,n3是对应矩阵第一维度维数、n4是对应矩阵第二维度维数。那么xmn代表n4*n3矩阵内第m行(n4)、第n列(n3)对应的浓度值。扩散场景相关参数i通常具有3~4维特征,通过将具有3~4维特征的i与具有超高维特征的x相关联,典型扩散场景,即模拟参数取值较有代表性的场景,如泄漏速率取1kg/s、5kg/s,10kg/s、30kg/s、50kg/s,60kg/s、80kg/s。该取值可以分别代表小、中、大泄漏速率。其他参数如风速等亦有相关标准。
[0066]
步骤3、将具有高维时空特征的气体浓度数据集x通过conv-vae无监督模型耦合算法降维至具有连续分布特征的低维度潜在空间变量z,构建具有不确定性分布特征的气体浓度概率分布p(x),根据下式可知,p(x)可通过确认隐藏层z的分布p(z|x)来确定:
[0067]
p(x)=∫p(x|z)p(z)dz,z~p(z|x)
ꢀꢀꢀ
(2)
[0068]
通过构建卷积概率编码器p
θ
(z|x),其中θ代表z的分布参数,即当θ确定时,z的分布就是确定的。通过输入步骤2中公式(1)的气体浓度数据x计算n1个扩散场景下具有连续分布特征的nz维潜在空间变量z,计算表示如下:
[0069][0070]
构建卷积概率解码器p
θ
(x|z),低维的潜在空间变量z通过解码器p
θ
(x|z)升维生成具有与对应气体浓度x具有相同时空分布特征的气云浓度数据集x
′
,计算表示如下:
[0071][0072]
式中,nz潜在空间的维数、表征潜在空间大小,是变分参数,代表潜在空间变量z的第nz维度,代表气体浓度数据集x经过具有变分参数的编码器encoder后,可以转换为具有nz维的潜在空间变量z,因为气体浓度数据集x一共有n1个,因此显示为
为将潜在空间变量经过decoder再转换为气体浓度数据集x
′
。
[0073]
为了区分之前对应的x,这里标注为x
′
。编码器和解码器就是将原数据x分解为z再复原回原数据x
′
的过程。每个z列表包含特定x的空间特征信息。因为一共有n1个场景,因此有n1个气体浓度x,编码器就能生成n1个潜在空间变量z。这些都是一一对应的关系,也就是n1个场景中,每一个特定的场景都有对应的x就会有对应的z,特定x的空间特征信息。每个z列表:代表一个列表。也就是说每一个不同的x经过编码器都会形成一个z列表。一共由n1个x,就会有n1个z列表。
[0074]
在通过conv-vae无监督模型耦合算法构建卷积概率解码器p
θ
(x|z)的过程中,根据一般贝叶斯推断可知p
θ
(x|z)的求解需要p(x)。根据公式(2)可知p(x)在深度学习过程中存在计算成本过大无法训练的问题。因此,在p
θ
(x|z)模型构建过程使用适用于深度学习的变分贝叶斯推理。即:
[0075]
第一步:引入变分分布逼近代替积概率编码器p
θ
(x|z)。通过求解变分分布与所求分布即卷积概率编码器p
θ
(x|z)两者之间的kullback-leibler(即kl散度)的最小值使得能够逼近代替p
θ
(x|z),kl散度表示如下:
[0076][0077]
式中,p(x)为气体浓度数据集x对应的概率分布,为证据下界,为和p
θ
(z|x)之间的kl散度,θ是权重、偏差,其中z分布可参数化为z=μ+σ*ε(ε~n(0,1)),代表潜在空间变量z的特征值,即均值、偏差;
[0078]
不确定性分布特征的气体浓度概率分布p(x)为气体浓度数据集x对应的概率分布,在构建模型过程中,公式(5)中的logp(x)对于每个确定气体浓度是固定的,因此求解kl散度最小值可变为求解证据下界最大值;
[0079]
第二步:对公式(5)中证据下界进行变形处理。在conv-vae模型中,可以计算为:
[0080][0081]
式中,为与p
θ
(z)的kl散度,为重构损失,即mse(x-x`),p
θ
(z)为潜在空间变量z对应的概率分布;
[0082]
假设p
θ
(z)为中心各向同性高斯分布并且是具有对角协方差结构的多元高斯分布,且该高斯分布可参数化为z=μ+σ*ε(ε~n(0,1)),进一步表示为:
[0083][0084]
式中,j为训练次数;σj代表第j次训练的方差;μj代表第j次训练的均值,x'为对应气体浓度x具有相同时空分布特征的气体浓度数据;
[0085]
conv-vae模型的代表性结构如下表所示:
[0086][0087]
第三步:确定变分分布及conv-vae模型中编码器卷积层输出,最大化第二步中的公式(7)中证据下界此时由于公式(5)中logp(x)对于每个确定数据集x是固定的,因此公式(5)中kl散度最小,可以使用变分分布逼近替代难解的p
θ
(z|x)。同时,通过最大化使之对应的μ和ε作为conv-vae编码器中卷积层的输出;
[0088]
第四步:根据μ和ε,确定编码器和解码器p
θ
(x|z),通过编码器输入公式(1)的气体浓度x来计算n1个扩散场景下具有nz维的潜在空间变量z矩阵,计算表示如下:
[0089][0090]
式中,nz是潜在空间大小,每个z列表包含特定x的空间特征信息。
[0091]
同样,低维度潜在空间变量z可以通过解码器p
θ
(x|z)升维生成具有与对应气体浓度x具有相同时空分布特征的气体浓度数据x
′
,计算可以表示如下:
[0092][0093]
第五步:确定具有不确定性分布特征的气体浓度概率分布p(x),潜在空间变量z的概率分布p(z),特征分布参数为θ,通过第三步θ的确定,可以获得具有特定分布的p(z),即p
θ
(z),结合解码器p
θ
(x|z),根据公式(2)得到具有不确定性分布特征的气体浓度概率分布p(x)。
[0094]
步骤4:构建输入典型扩散场景i和潜在空间变量z之间的概率密度p(z|i)的映射关系,将(i,z)作为训练数据集及标签,假定权重w遵循密度分布p(w|z,i),通过vbnn开展有监督学习确定权重w,将权重w作为最优化变分参数χ,建立典型扩散场景i和潜在空间变量z之间的概率密度映射关系p(z|i);具体详细步骤如下:
[0095]
第一步:对概率密度p(w|z,i)权重建模,引入变分分布q(w|χ),构建变分分布q(w|χ)与真后验密度p(w|z,i)两个分布之间的kullback-leibler(即kl散度),求解变分分布q(w|χ)与p(w|z,i)两个分布之间的kl散度的最小值,使得q(w|χ)能够逼近代替p(w|z,i),其中,证据下界elbo(χ,z,i)表示为:
[0096]
elbo(χ,z,i)=-d
kl
(q(w|χ)||p(w))+e
q(w|z,i)
[logp(z|i,w)]
ꢀꢀꢀ
(8)
[0097]
式中,χ代表需要优化的变分参数,p(w|z,i)为在z、i确定条件下对应w的概率分布密度,w表示权重,z潜在空间变量,i输入参数。
[0098]
第二步:设vbnn模型的输出预测值为zpred,因此zpred概率密度分布与z相同,服从p(z|w,i),对公式(8)中e
q(w|z,i)
[logp(z|i,w)]进行变形处理,可表示为:
[0099][0100]
式中,σz为手动给出的噪声方差;
[0101]
第三步:确定变分分布q(w|χ),最大化公式(8)中elbo(χ,z,i),使用变分分布q(w|χ)逼近替代难解的真后验密度p(w|z,i),同时,通过最大化公式(8)中elbo(χ,z,i),得到与之对应的最优变分参数χ;
[0102]
第四步:根据最优变分参数χ以及使用q(w|χ)代替p(w|z,i),概率密度p(z|i)表示为:
[0103]
p(z|i)=∫p(z|i,w)q(w|χ)dw
ꢀꢀꢀ
(10)
[0104]
第五步:由于公式(10)右侧积分存在计算成本较高的问题,因此,采用核密度估计法(kde)对概率密度p(z|i)进行估计,应用蒙特卡罗抽样生成多个关于z的预测值,具体表示如下:
[0105][0106]
式中,m是蒙特卡罗样本数,wm表示第m组的权重与偏差,zm表示第m个潜在空间分布变量。给定wm和输入i,vbnn模型可以自动计算出zm。
[0107]
构建出在给定wm的情况下,输入典型扩散场景i和潜在空间变量z之间的概率密度映射关系p(z|i)。
[0108]
步骤5:将vbnn有监督的学习模型与conv-vae无监督模型耦合算法模型的解码器部分相结合,建立考虑不确定性推理的有机气体泄漏扩散实时在线智能预警模型,在线智能预警模型通过给定与扩散场景i有关的参数,以实现对扩散浓度x的概率时序预测,即p(x|i);
[0109]
根据步骤3中构建的卷积概率解码器p(x|z)以及步骤4中构建的映射关系p(z|i),构建考虑不确定性推理的有机气体泄漏扩散实时在线智能预警模型p(x|i):
[0110]
p(x|i)=∫p(x|z)p(z|i)dz,z~p(z|i)and i=f-1
(x)
ꢀꢀꢀ
(12)
[0111]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1