一种自适应的特征点提取方法及装置与流程
1.本发明涉及自动驾驶技术领域,具体涉及一种自适应的特征点提取方法及装置。
背景技术:
2.随着我国智能网联汽车的高速发展,自动驾驶车辆在各行各业都有广泛应用。在一些特定场景,如港口运输车,物流小车,园区游览车,道路清扫车,地下车库自动泊车等都有广泛的应用,而这些场景一个共同特点是低速场景,因此基于视觉的方法,提取这些场景的特征点,对构建场景的地图意义重大,并且基于视觉的特征点的地图构建可以降低平台算力的依赖性,是一个非常有意义的一个研究方向。
技术实现要素:
3.本发明针对现有技术中存在的技术问题,提供一种自适应的特征点提取方法及装置。
4.本发明解决上述技术问题的技术方案如下:
5.一方面,本发明提供一种自适应的图像特征点提取方法,其特征在于,包括以下步骤:
6.获取相机采集的图像数据;
7.利用fast算法提取特征点,
8.将提取的特征点参数与预设的参数阈值进行比较;
9.若特征点参数大于或等于参数阈值,则自动采用orb特征提取算法对图像数据进行特征点提取;
10.若特征点参数小于参数阈值,则自动采用surf特征点提取算法对图像数据进行特征点提取。
11.进一步的,该方法还包括,利用fast算法对各种特定场景进行特征点采集,获得特征点经验阈值,并根据所述特征点经验阈值以及场景信息生成特征点经验阈值表。
12.进一步的,还包括:获取相机采集的图像数据时,判断相机采集的图像数据所处的场景信息;
13.利用fast算法提取图像数据中的特征点时,根据场景信息查询特征点经验阈值表,获取所述图像数据所处场景对应的特征点参数阈值。
14.进一步的,所述场景信息包括场景位置信息,根据所述场景位置信息判断相机采集的图像数据所处的场景,再查询特征点经验阈值表,获取所述图像数据所处场景对应的特征点参数阈值。
15.进一步的,获取相机采集的图像数据后,对所述图像数据进行高斯平滑处理。
16.另一方面,本发明还提供一种自适应的图像特征点提取装置,包括:
17.数据获取模块,用于获取相机采集的图像数据;
18.第一特征提取模块,利用fast算法提取特征点,
19.比较判断模块,将提取的特征点参数与预设的参数阈值进行比较;
20.第二特征提取模块,用于在特征点参数大于或等于参数阈值时,采用orb特征提取算法对图像数据进行特征点提取;
21.第三特征提取模块,用于在特征点参数小于参数阈值时,采用surf特征点提取算法对图像数据进行特征点提取。
22.进一步的,该装置还包括,阈值表构建模块,利用fast算法对各种特定场景进行特征点采集,获得特征点经验阈值,并根据所述特征点经验阈值以及场景信息生成特征点经验阈值表。
23.进一步的,所述数据获取模块,还用于判断相机采集的图像数据所处的场景信息;
24.所述第一特征提取模块,根据场景信息查询特征点经验阈值表,获取所述图像数据所处场景对应的特征点参数阈值。
25.进一步的,所述场景信息包括场景位置信息,根据所述场景位置信息判断相机采集的图像数据所处的场景,再查询特征点经验阈值表,获取所述图像数据所处场景对应的特征点参数阈值。
26.进一步的,预处理模块,用于对所述图像数据进行高斯平滑处理。
27.本发明的有益效果是:使用机器视觉构建轨迹地图,其中的关键是提取不同图片帧中的特征点,而更具场景不同,拍摄的不同场景中存在的特征点个数,以及特征点的提取难易程度都有差异,而本专利是采用一种自适应的方法,在不同的场景自适应的采用不同的特征提取的方法。本发明减少特征点计算量,降低了计算平台成本,提高了不同场景特征提取的准确性。
附图说明
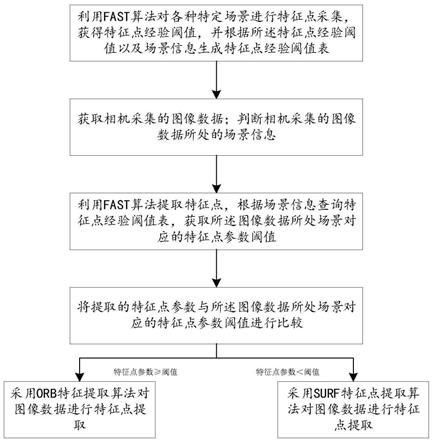
28.图1为本发明实施例提供的一种自适应的图像特征点提取方法流程图;
29.图2为本发明实施例提供的一种自适应的图像特征点提取装置结构示意图。
具体实施方式
30.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
31.图1为本发明实施例提供的一种自适应的图像特征点提取方法流程图。如图1所示,本发明方法包括以下步骤:
32.s1,利用fast算法对各种特定场景进行特征点采集,获得特征点经验阈值,并根据所述特征点经验阈值以及场景信息生成特征点经验阈值表;特定场景可以地下车库、地上停车场、港口、特定园区等等。所述场景信息包括场景位置信息,具体的可以是gps信息。在特征点经验阈值表中每一场景均对应一个特征点参数阈值。
33.s2,获取相机采集的图像数据;判断相机采集的图像数据所处的场景信息;在获取相机采集的图像数据时,可以同时获取相机的gps信息,通过gps信息判断相机处于何种场景之下。
34.s3,先对所述图像数据进行高斯平滑处理后再利用fast算法提取特征点,根据场景信息查询特征点经验阈值表,获取所述图像数据所处场景对应的特征点参数阈值;例如
当gps定位在地下车库,则需要在特征点经验阈值表中查询地下车库对应的特征点参数阈值。
35.利用fast算法提取特征点,包括:
36.1.从图片中选取一个像素p,下面我们将判断它是否是一个特征点。我们首先把它的亮度值设为ip;
37.2.设定一个合适的阈值t;
38.3.考虑以该像素点为中心的一个半径等于3像素的离散化的bresenham圆,这个圆的边界上有16个像素;
39.4.如果在这个大小为16个像素的圆上有n个连续的像素点,它们的像素值要么都比ip+t大,要么都比ip-t小,那么它就是一个特征点;
40.5.保存第一帧的特征点。
41.s4,将提取的特征点参数与预设的参数阈值进行比较,即将提取的特征点参数与所述图像数据所处场景对应的特征点参数阈值进行比较。
42.若特征点参数大于或等于参数阈值,则自动采用orb特征提取算法对图像数据进行特征点提取;
43.orb特征提取算法首先利用fast算法进行特征点检测,然后进行brief特征描述。brief是一种二进制描述子,其描述向量由多个0和1组成,这里的0和1编码了特征点附近两个像素(例如p和q)的大小关系。brief正是这样一种基于二进制编码生成特征描述子,以及利用汉明距离进行特征匹配的算法。由于brief只是一种特征描述子,因此事先得检测并定位特征点,可采用fast算法检测特征点,在此基础上利用brief算法建立特征描述符,在特征点邻域内随机选取若干点对(p,q),并比较这些点对的灰度值,若i(p)》i(q),则编码为1,否则编码为0。这样便可得到一个特定长度的二进制编码串,即brief特征描述子。
44.若特征点参数小于参数阈值,则自动采用surf特征点提取算法对图像数据进行特征点提取。
45.surf特征点提取算法:
46.首先,使用hessian矩阵来检测特征点,该矩阵是x,y方向的二阶导数矩阵,可测量一个函数的局部曲率,其行列式值代表像素点周围的变化量,特征点需取行列式值的极值点。用方型滤波器取代sift中的高斯滤波器,利用积分图计算位于滤波器方型的四个角落值。其次,通过特征点邻近信息插补来定位特征点。然后,通过计算特征点周围像素点x,y方向的哈尔小波变换,并将x,y方向的变换值在x,y平面某一角度区间内相加组成一个向量,在所有的向量当中最长的(即x、y分量最大的)即为此特征点的方向。最后,选定了特征点的方向后,其周围相素点需要以此方向为基准来建立描述子。此时以55个像素点为一个子区域,取特征点周围2020个像素点的范围共16个子区域,计算子区域内的x、y方向(此时以平行特征点方向为x、垂直特征点方向为y)的哈尔小波转换总和σdx、σdyσdx、σdy与其向量长度总和σ|dx|、σ|dy|σ|dx|、σ|dy|共四个量值,共产生一个64维的描述子。
47.图2为本发明实施例提供的一种自适应的图像特征点提取装置结构示意图。如图2所示,该装置包括:
48.阈值表构建模块,利用fast算法对各种特定场景进行特征点采集,获得特征点经验阈值,并根据所述特征点经验阈值以及场景信息生成特征点经验阈值表;所述场景信息
包括场景位置信息,
49.数据获取模块,用于获取相机采集的图像数据;判断相机采集的图像数据所处的场景信息;
50.预处理模块,用于对所述图像数据进行高斯平滑处理;
51.第一特征提取模块,利用fast算法提取特征点,根据场景信息查询特征点经验阈值表,获取所述图像数据所处场景对应的特征点参数阈值;
52.比较判断模块,将提取的特征点参数与预设的参数阈值进行比较;即将提取的特征点参数与所述图像数据所处场景对应的特征点参数阈值进行比较;
53.第二特征提取模块,用于在特征点参数大于或等于参数阈值时,采用orb特征提取算法对图像数据进行特征点提取;
54.第三特征提取模块,用于在特征点参数小于参数阈值时,采用surf特征点提取算法对图像数据进行特征点提取。
55.使用机器视觉构建轨迹地图,其中的关键是提取不同图片帧中的特征点,而根据场景不同,拍摄的不同场景中存在的特征点个数,以及特征点的提取难易程度都有差异,而本专利是采用一种自适应的方法,在不同的场景自适应的采用不同的特征提取的方法,在计算速度方面,fast》》orb》》surf(各差一个量级),而在鲁棒性方面,surf》》orb》》fast。因此本发明方法减少特征点计算量,降低了计算平台成本;提高了不同场景特征提取的准确性。
56.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1