基于KingMapGIS的自然灾害综合风险普查方法、系统及设备与流程
基于kingmap gis的自然灾害综合风险普查方法、系统及设备
技术领域
1.本发明涉及一种调查方法,特别是涉及一种基于kingmap gis的自然灾害综合风险普查方法、系统及设备。
背景技术:
2.我国位于中纬度自然灾害带,全年遭受到不稳定的季风环流影响,同时我国位于环太平洋地震带与欧亚地震带之间,地壳运动强烈频繁,再加上复杂多样的地形环境,使得我国各类自然灾害频发且损失重大。做好防灾减灾工作是保障人民生命财产安全的重要基础,全国自然灾害普查工作,为掌握当前自然灾害风险隐患数据,提升全社会灾害防范意识,化解未来自然灾害风险提供了权威数据。
3.无人机在自然灾害综合风险普查中获得广泛应用,特别在承灾体属性调查中能够发挥重要作用。kingmap gis平台是地理信息系统开发平台,用于输入、存储、查询、分析和显示地理数据,具备支持数字地球、数字区域、数字城市的能力,拥有支持基于大型关系数据库和对象关系数据库系统的空间数据引擎,为gis应用提供了多用户并发操作控制和事务处理功能,支持用户进行基于c/s结构、b/s结构以及多层结构的应用和开发。
4.目前有些建筑物上空是禁飞区,所以需要设计一种调查方法,无人机不用飞到建筑物上空就可以测量建筑物高度数据,并可以借助gis平台以地图形式进行建筑物高度数据分布展示,对于提高自然灾害综合风险普查工作效率具有重要意义。
技术实现要素:
5.因此,本发明为实现自然灾害综合风险普查工作中长方体建筑物承灾体的高度数据调查及展示,设计了一种基于kingmap gis的自然灾害综合风险普查方法、系统及设备。
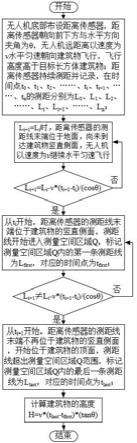
6.本发明所采用的技术方案是:一种基于kingmap gis的自然灾害综合风险普查方法,其特征在于:步骤1,无人机底部布设距离传感器,距离传感器朝向前下方与水平方向夹角为θ,无人机远距离以速度为v水平匀速朝向建筑物飞行,飞行高度高于目标长方体建筑物;距离传感器持续测距并记录,在时间点t0、t1、t2、
……
、t
i
、t
i+1
、
……
、t
n
的测距分别为l0、l1、l2、
……
、l
i
、l
i+1
、
……
、l
n
;步骤2,当l
i+1
=l
i
时,距离传感器的测距线末端位于地面,尚未到达建筑物竖直侧面,无人机以速度为v继续水平匀速飞行;步骤3,当l
i+1
=l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i
开始,距离传感器的测距线末端位于建筑物的竖直侧面,测距线开始进入测量空间区域q,标记测量空间区域q内的第一条测距线为l
first
,对应的时间点为t
first
;步骤4,当l
i+1
≠l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i+1
开始,距离传感器的测距线末端不再位于建筑物的竖直侧面,开始位于建筑物的顶面,测距线超出测量空间区域q范围,标记测量空间区域q内的最后一条测距线为l
last
,对应的时间点为t
last
;
步骤5,计算建筑物的高度h=v*(t
last
‑
t
first
)*(tanθ);步骤6,重复以上步骤,记录普查区内多个建筑物高度数据并在kingmap gis中以地图的形式进行展示。
7.一种基于kingmap gis的自然灾害综合风险普查系统,其特征在于:包括执行模块、数据建库模块、地图展示模块、最佳路径分析模块、地图发布模块。
8.所述执行模块用于计算建筑物高度,包括以下步骤:(1)无人机底部布设距离传感器,距离传感器朝向前下方与水平方向夹角为θ,无人机远距离以速度为v水平匀速朝向建筑物飞行,飞行高度高于目标长方体建筑物;距离传感器持续测距并记录,在时间点t0、t1、t2、
……
、t
i
、t
i+1
、
……
、t
n
的测距分别为l0、l1、l2、
……
、l
i
、l
i+1
、
……
、l
n
;(2)当l
i+1
=l
i
时,距离传感器的测距线末端位于地面,尚未到达建筑物竖直侧面;(3)当l
i+1
=l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i
开始,距离传感器的测距线末端位于建筑物的竖直侧面,测距线开始进入测量空间区域q,标记测量空间区域q内的第一条测距线为l
first
,对应的时间点为t
first
;(4)当l
i+1
≠l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i+1
开始,距离传感器的测距线末端不再位于建筑物的竖直侧面,开始位于建筑物的顶面,测距线超出测量空间区域q范围,标记测量空间区域q内的最后一条测距线为l
last
,对应的时间点为t
last
;(5)计算建筑物的高度h=v*(t
last
‑
t
first
)*(tanθ)。
9.所述数据建库模块,将采集多个建筑物的高度数据和地理位置数据自动添加至数据库中。
10.所述地图展示模块,将多个建筑的高度数据在地图层上展示。
11.所述最佳路径分析模块,用于标记高度低的建筑所在区域,并建立通往这些区域的路径,低建筑所在区域和路径在路径层上展示。
12.所述地图发布模块,用于制作建筑物高度分布地图和通往低建筑区域的路径图,作为地震避难场所路径参考。
13.一种基于kingmap gis的自然灾害综合风险普查设备,其特征在于:包括无人机和计算机终端,无人机内置通信模块、无人机处理器、无人机存储器,无人机底部装有朝向前下方的距离传感器,距离传感器与水平方向夹角为θ,无人机处理器执行计算机终端发出的指令,无人机存储器短暂存储测距数值及对应时间点。
14.计算机终端内置通信模块,还包括计算机终端处理器、计算机终端存储器以及储存在所述计算机终端存储器中且被配置由所述计算机终端处理器执行的计算机程序,所述计算机终端处理器执行所述计算机程序时,能够控制和实现上述的这种基于kingmap gis的自然灾害综合风险普查方法,实现上述的这种基于kingmap gis的自然灾害综合风险普查系统。
15.本发明的原理为:当距离传感器的测距线的末端位于地面,尚未到达建筑物竖直侧面,因为无人机以速度v水平匀速飞行,所以下一时间点的测距l
i+1
与上一时间点的测距l
i
相等,即l
i+1
=l
i
。
16.一旦测距线的末端达到建筑物的竖直侧面,无人机的下一时间点t
i+1
与上一时间点t
i
之间的位移s=v*(t
i+1
‑
t
i
),因为测距线与水平方向的夹角为θ,那么两条测距线之间的
垂直间距h=s*(sinθ);无人机水平位移s、时间点t
i
的测距l
i
、时间点t
i+1
的测距l
i+1
、两条测距线末端连接线段组成梯形,测距l
i
与测距l
i+1
平行。
17.从l
i+1
的两端向l
i
的两条垂直线h,将梯形分成两端三角型、中间长方形三部分,那么l
i
=s*(cosθ)+l
i+1
+h*(tanθ),代入s=v*(t
i+1
‑
t
i
)和h=s*(sinθ)后,最后可以推得:l
i
=v*(t
i+1
‑
t
i
)*(cosθ)+l
i+1
+v*(t
i+1
‑
t
i
)*(sinθ)* (tanθ)=v*(t
i+1
‑
t
i
)*[(sinθ)2+(cosθ)2]/(cosθ)+l
i+1
,代入(sinθ)2+(cosθ)2=1后,l
i
=v*(t
i+1
‑
t
i
)/(cosθ)+l
i+1
,即l
i+1
=l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)。
[0018]
所以当l
i+1
与l
i
呈现上式中的线性关系时,就可以判定测距线进入建筑物高度的测量空间区域q,当不再呈现上式的线性关系时,判定测距线脱离建筑物高度的测量空间区域q。
[0019]
假如标记建筑物高度的测量空间区域q中,第一条测距线为l
first
,对应的时间点位t
first
;最后一条测距线为l
last
,对应的时间点为t
last
,那么建筑的高度h,就是梯形的测量空间区域q中的一条斜边,h=h/(cosθ),代入s=v*(t
last
‑
t
first
)和h=s*(sinθ)后,最终得到h=v*(t
last
‑
t
first
)*(tanθ)。
[0020]
本发明一种基于kingmap gis的自然灾害综合风险普查方法、系统及设备具有如下优点:(1)将无人机和距离传感器应用在建筑物承灾体相关数据普查工作中,方案设计新颖;(2)利用距离传感器不同时间点的测距线构成的几何数据关系,推算出建筑物的准确高度,构思巧妙;(3)基于kingmap gis平台,制作建筑物高度分布地图和通往低建筑区域的路径图,作为地震避难场所路径参考。
[0021]
所以,这种基于kingmap gis的自然灾害综合风险普查方法、系统及设备,能够实现自然灾害综合风险普查工作中长方体建筑物承灾体的高度数据调查及展示。
[0022]
本发明的其他特征和优点将在随后的说明书中阐述,或者通过实施本发明而了解。
附图说明
[0023]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0024]
图1是无人机装配结构示意图。
[0025]
图2是距离传感器安装在无人机底部的结构示意图。
[0026]
图3是距离传感器结构示意图。
[0027]
图4是不同时间节点测距线长的线性规律示意图。
[0028]
图5是时间节点t
i
和t
i+1
的测距线长的几何关系示意图。
[0029]
图6是呈线性规律的测距线长所在测量空间区域q的示意图。
[0030]
图7是时间节点t
first
和t
last
的测距线长的几何关系示意图。
[0031]
图8是建筑物高度的计算方法流程图。
[0032]
图中标号:1
‑
无人机、2
‑
距离传感器、3
‑
长方体建筑物。
具体实施方式
[0033]
以下将结合附图和实施例对本发明一种基于kingmap gis的自然灾害综合风险普查方法、系统及设备作进一步的详细描述,在方向描述中,无人机的水平前进方向为前,相反方向为后。
[0034]
本发明所采用的技术方案,如图1、图2、图3、图4、图5、图6、图7、图8所示:一种基于kingmap gis的自然灾害综合风险普查方法,其特征在于:步骤1,无人机底部布设距离传感器,距离传感器朝向前下方与水平方向夹角为θ,无人机远距离以速度为v水平匀速朝向建筑物飞行,飞行高度高于目标长方体建筑物;距离传感器持续测距并记录,在时间点t0、t1、t2、
……
、t
i
、t
i+1
、
……
、t
n
的测距分别为l0、l1、l2、
……
、l
i
、l
i+1
、
……
、l
n
;步骤2,当l
i+1
=l
i
时,距离传感器的测距线末端位于地面,尚未到达建筑物竖直侧面,无人机以速度为v继续水平匀速飞行;步骤3,当l
i+1
=l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i
开始,距离传感器的测距线末端位于建筑物的竖直侧面,测距线开始进入测量空间区域q,标记测量空间区域q内的第一条测距线为l
first
,对应的时间点为t
first
;步骤4,当l
i+1
≠l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i+1
开始,距离传感器的测距线末端不再位于建筑物的竖直侧面,开始位于建筑物的顶面,测距线超出测量空间区域q范围,标记测量空间区域q内的最后一条测距线为l
last
,对应的时间点为t
last
;步骤5,计算建筑物的高度h=v*(t
last
‑
t
first
)*(tanθ);步骤6,重复以上步骤,记录普查区内多个建筑物高度数据并在kingmap gis中以地图的形式进行展示。
[0035]
一种基于kingmap gis的自然灾害综合风险普查系统,其特征在于:包括执行模块、数据建库模块、地图展示模块、最佳路径分析模块、地图发布模块。
[0036]
所述执行模块用于计算建筑物高度,包括以下步骤:(1)无人机底部布设距离传感器,距离传感器朝向前下方与水平方向夹角为θ,无人机远距离以速度为v水平匀速朝向建筑物飞行,飞行高度高于目标长方体建筑物;距离传感器持续测距并记录,在时间点t0、t1、t2、
……
、t
i
、t
i+1
、
……
、t
n
的测距分别为l0、l1、l2、
……
、l
i
、l
i+1
、
……
、l
n
;(2)当l
i+1
=l
i
时,距离传感器的测距线末端位于地面,尚未到达建筑物竖直侧面;(3)当l
i+1
=l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i
开始,距离传感器的测距线末端位于建筑物的竖直侧面,测距线开始进入测量空间区域q,标记测量空间区域q内的第一条测距线为l
first
,对应的时间点为t
first
;(4)当l
i+1
≠l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)时,那么从t
i+1
开始,距离传感器的测距线末端不再位于建筑物的竖直侧面,开始位于建筑物的顶面,测距线超出测量空间区域q范围,标记测量空间区域q内的最后一条测距线为l
last
,对应的时间点为t
last
;(5)计算建筑物的高度h=v*(t
last
‑
t
first
)*(tanθ)。
[0037]
所述数据建库模块,将采集多个建筑物的高度数据和地理位置数据自动添加至数据库中。
[0038]
所述地图展示模块,将多个建筑的高度数据在地图层上展示。
[0039]
所述最佳路径分析模块,用于标记高度低的建筑所在区域,并建立通往这些区域的路径,低建筑所在区域和路径在路径层上展示。
[0040]
所述地图发布模块,用于制作建筑物高度分布地图和通往低建筑区域的路径图,作为地震避难场所路径参考。
[0041]
一种基于kingmap gis的自然灾害综合风险普查设备,其特征在于:包括无人机和计算机终端,无人机内置通信模块、无人机处理器、无人机存储器,无人机底部装有朝向前下方的距离传感器,距离传感器与水平方向夹角为θ,无人机处理器执行计算机终端发出的指令,无人机存储器短暂存储测距数值及对应时间点。
[0042]
计算机终端内置通信模块,还包括计算机终端处理器、计算机终端存储器以及储存在所述计算机终端存储器中且被配置由所述计算机终端处理器执行的计算机程序,所述计算机终端处理器执行所述计算机程序时,能够控制和实现上述的这种基于kingmap gis的自然灾害综合风险普查方法,实现上述的这种基于kingmap gis的自然灾害综合风险普查系统。
[0043]
当距离传感器的测距线的末端位于地面,尚未到达建筑物竖直侧面,因为无人机以速度v水平匀速飞行,所以下一时间点的测距l
i+1
与上一时间点的测距l
i
相等,即l
i+1
=l
i
。
[0044]
一旦测距线的末端达到建筑物的竖直侧面,无人机的下一时间点t
i+1
与上一时间点t
i
之间的位移s=v*(t
i+1
‑
t
i
),因为测距线与水平方向的夹角为θ,那么两条测距线之间的垂直间距h=s*(sinθ);无人机水平位移s、时间点t
i
的测距l
i
、时间点t
i+1
的测距l
i+1
、两条测距线末端连接线段组成梯形,测距l
i
与测距l
i+1
平行。
[0045]
从l
i+1
的两端向l
i
的两条垂直线h,将梯形分成两端三角型、中间长方形三部分,那么l
i
=s*(cosθ)+l
i+1
+h*(tanθ),代入s=v*(t
i+1
‑
t
i
)和h=s*(sinθ)后,最后可以推得:l
i
=v*(t
i+1
‑
t
i
)*(cosθ)+l
i+1
+v*(t
i+1
‑
t
i
)*(sinθ)* (tanθ)=v*(t
i+1
‑
t
i
)*[(sinθ)2+(cosθ)2]/(cosθ)+l
i+1
,代入(sinθ)2+(cosθ)2=1后,l
i
=v*(t
i+1
‑
t
i
)/(cosθ)+l
i+1
,即l
i+1
=l
i
‑
v*(t
i+1
‑
t
i
)/(cosθ)。
[0046]
所以当l
i+1
与l
i
呈现上式中的线性关系时,就可以判定测距线进入建筑物高度的测量空间区域q,当不再呈现上式的线性关系时,判定测距线脱离建筑物高度的测量空间区域q。
[0047]
假如标记建筑物高度的测量空间区域q中,第一条测距线为l
first
,对应的时间点位t
first
;最后一条测距线为l
last
,对应的时间点为t
last
,那么建筑的高度h,就是梯形的测量空间区域q中的一条斜边,h=h/(cosθ),代入s=v*(t
last
‑
t
first
)和h=s*(sinθ)后,最终得到h=v*(t
last
‑
t
first
)*(tanθ)。
[0048]
上文描述中*代表乘号,/代表除号。
[0049]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1