一种光伏组件清洗机器人的智能控制方法与流程
1.本发明涉及光伏组件清洗技术领域,具体为一种光伏组件清洗机器人的智能控制方法。
背景技术:
2.光伏组件长时间暴露于空气中,灰尘容易沉积在光伏组件的表面,导致组件表面能够接收到的光照强度下降,引起组件输出功率下降,最终降低光伏电站的发电量。据相关数据和现有研究表明,长时间的积灰能够使光伏组件的峰值输出功率降低最高达到40%左右,为了减少灰尘遮蔽光伏组件导致发电量降低的影响,需要不定期的对组件进行清洗。
3.目前,通过确定光伏电站中的其中一块光伏组件的清洁程度,在该光伏组件的清洁程度较低时,确定整个光伏电站中的所有光伏组件均需要进行清洗,并对整个光伏电站中的所有光伏组件进行统一清洗,能耗较大,而且清洗时的控制不够完善,不能满足人们的要求。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种光伏组件清洗机器人的智能控制方法,解决了一般清洗时需要对整个光伏电站中的所有光伏组件进行统一清洗,能耗较大,而且清洗时的控制不够完善,不能满足人们的要求的问题。
6.(二)技术方案
7.为实现上述目的,本发明提供如下技术方案:
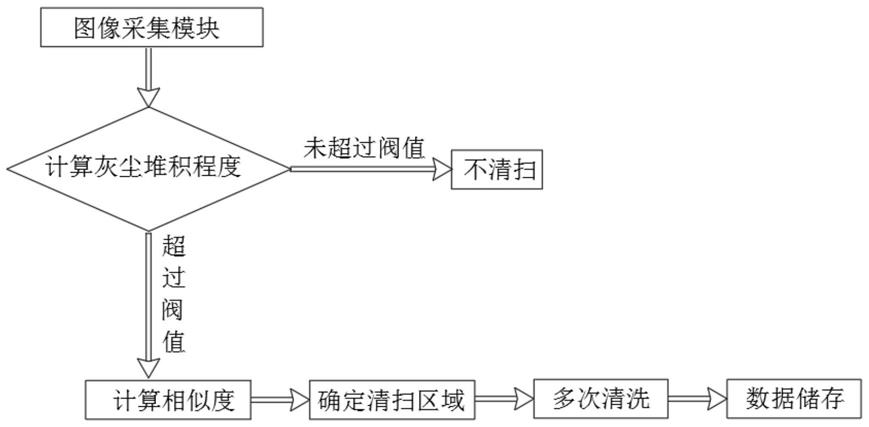
8.一种光伏组件清洗机器人的智能控制方法,包括以下步骤:
9.s1:图像采集模块,图像采集模块包括图像采集器,图像采集器设置在光伏组件的一侧,图像采集器采集光伏组件干净状态下的图像,并以此图像为初始图像,然后图像采集器间歇性的获取参考图像的集合;
10.s2:计算灰尘堆积程度,首先采集初始图像状态下光伏组件的最大开路电压和短路电流voc1、isc1,参考图像的集合中的光祖组件参考图像状态下的最大开路电压和短路电流voc2、isc2,采集后预先设定灰尘堆积程度阀值,然后计算灰尘堆积程度dj,计算公式为:dj=((voc1
‑
voc2)/voc1+(isc1
‑
isc2)/isc1)/2
×
100%,当计算的数据超过阀值时,则进行下一步,否则直接认定不需要清扫;
11.s3:计算相似度,通过获取的参考图像的集合中的参考图像与初始图像进行对比,然后计算其相似度,在计算时对初始图像和参考图像进行拆分,把其拆分成1
‑
1000个子图像,然后进行标记,标记后对每组子图像进行对比,相似度低于20%
‑
80%的子图像区域则需要进行清扫;
12.s4:确定清扫区域,通过计算相似度来确定光伏组件所要清扫的区域,并发送需要清扫区域的标记信息,并输出给清扫控制器,通过清扫控制器控制清洗机器人进行清扫;
13.s5:多次清洗,通过清扫控制器控制清洗机器人进行清扫后,通过图像采集模块再次采集光伏组件参考图像,然后针对清扫区域计算其相似度,如果相似度还是不满足要求,则进行再次清扫;
14.s6:数据储存,相似度计算数据、灰尘堆积程度数据、和清扫次数数据都要进行数据备份,并进行统计整理,以便后期查看。
15.作为本发明再进一步的方案,所述s1中参考图像的集合至少为两个光伏组件参考图像,相邻两次获取的参考图像的时间间隔为2
‑
8天。
16.进一步的,所述s2中包括灰尘堆积程度计算模块,灰尘堆积程度计算模块与图像采集模块相连接。
17.在前述方案的基础上,所述s3中包括图像预处理模块和相似度计算模块,相似度计算模块连接有信号传输模块,信号传输模块连接有清扫控制器。
18.进一步的,所述s5中再次清扫后再次进行采集光伏组件参考图像,然后进行相似度计算,在清扫三次后还不满足需要则进行警情上报。
19.在前述方案的基础上,所述s5中包括告警单元,告警单元与相似度计算模块相连。
20.本发明再进一步的方案,所述s6中对数据进行整理后进行数据分析,针对经常需要清洗的区域进行程序设计,定期进行清洗。
21.(三)有益效果
22.与现有技术相比,本发明提供了一种光伏组件清洗机器人的智能控制方法,具备以下有益效果:
23.1、本发明通过计算灰尘堆积程度能够初步判断整块光伏组件是否需要清扫,从大的方向进行把控,减少控制步骤,提高效率。
24.2、本发明中,通过计算初始图像与光伏组件参考图像的相似度来确定光伏组件区域是否需要清洗,实现了在光伏组件清洗时,对整个光伏组件区域的清洁程度进行分析,能够考虑光伏组件区域中的所有光伏组件的清洁状态,提高光伏组件清洗判定的准确度,方便针对不同的区域进行清洗,提高的光伏组件清洗的精度,降低了能耗。
25.3、本发明中,通过多次清洗和数据采集,能够确保待清洗区域能够得到彻底清洗达到要求。
26.4、本发明中,通过告警单元的设置能够在多次清洗都达不到要求时进行告警,通知工作人员进行处置,及时解决问题。
附图说明
27.图1为本发明提出的一种光伏组件清洗机器人的智能控制方法的流程结构示意图。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.实施例1
30.参照图1,一种光伏组件清洗机器人的智能控制方法,包括以下步骤:
31.s1:图像采集模块,图像采集模块包括图像采集器,图像采集器设置在光伏组件的一侧,图像采集器采集光伏组件干净状态下的图像,并以此图像为初始图像,然后图像采集器间歇性的获取参考图像的集合;
32.s2:计算灰尘堆积程度,首先采集初始图像状态下光伏组件的最大开路电压和短路电流voc1、isc1,参考图像的集合中的光祖组件参考图像状态下的最大开路电压和短路电流voc2、isc2,采集后预先设定灰尘堆积程度阀值,然后计算灰尘堆积程度dj,计算公式为:dj=((voc1
‑
voc2)/voc1+(isc1
‑
isc2)/isc1)/2
×
100%,当计算的数据超过阀值时,则进行下一步,否则直接认定不需要清扫,这样能够初步判断整块光伏组件是否需要清扫,从大的方向进行把控,减少控制步骤,提高效率;
33.s3:计算相似度,通过获取的参考图像的集合中的参考图像与初始图像进行对比,然后计算其相似度,在计算时对初始图像和参考图像进行拆分,把其拆分成1000个子图像,然后进行标记,标记后对每组子图像进行对比,相似度低于70%的子图像区域则需要进行清扫,通过计算初始图像与光伏组件参考图像的相似度来确定光伏组件区域是否需要清洗,实现了在光伏组件清洗时,对整个光伏组件区域的清洁程度进行分析,能够考虑光伏组件区域中的所有光伏组件的清洁状态,提高光伏组件清洗判定的准确度,方便针对不同的区域进行清洗,提高的光伏组件清洗的精度,降低了能耗;
34.s4:确定清扫区域,通过计算相似度来确定光伏组件所要清扫的区域,并发送需要清扫区域的标记信息,并输出给清扫控制器,通过清扫控制器控制清洗机器人进行清扫;
35.s5:多次清洗,通过清扫控制器控制清洗机器人进行清扫后,通过图像采集模块再次采集光伏组件参考图像,然后针对清扫区域计算其相似度,如果相似度还是不满足要求,则进行再次清扫,通过多次清洗和数据采集,能够确保待清洗区域能够得到彻底清洗达到要求;
36.s6:数据储存,相似度计算数据、灰尘堆积程度数据、和清扫次数数据都要进行数据备份,并进行统计整理,以便后期查看。
37.本发明的s1中参考图像的集合至少为两个光伏组件参考图像,相邻两次获取的参考图像的时间间隔为7天,s2中包括灰尘堆积程度计算模块,灰尘堆积程度计算模块与图像采集模块相连接,s3中包括图像预处理模块和相似度计算模块,相似度计算模块连接有信号传输模块,信号传输模块连接有清扫控制器,s5中再次清扫后再次进行采集光伏组件参考图像,然后进行相似度计算,在清扫三次后还不满足需要则进行警情上报。
38.需要特别说明的是,s5中包括告警单元,告警单元与相似度计算模块相连,通过告警单元的设置能够在多次清洗都达不到要求时进行告警,通知工作人员进行处置,及时解决问题,s6中对数据进行整理后进行数据分析,针对经常需要清洗的区域进行程序设计,定期进行清洗。
39.实施例2
40.参照图1,一种光伏组件清洗机器人的智能控制方法,包括以下步骤:
41.s1:图像采集模块,图像采集模块包括图像采集器,图像采集器设置在光伏组件的一侧,图像采集器采集光伏组件干净状态下的图像,并以此图像为初始图像,然后图像采集
器间歇性的获取参考图像的集合;
42.s2:计算灰尘堆积程度,首先采集初始图像状态下光伏组件的最大开路电压和短路电流voc1、isc1,参考图像的集合中的光祖组件参考图像状态下的最大开路电压和短路电流voc2、isc2,采集后预先设定灰尘堆积程度阀值,然后计算灰尘堆积程度dj,计算公式为:dj=((voc1
‑
voc2)/voc1+(isc1
‑
isc2)/isc1)/2
×
100%,当计算的数据超过阀值时,则进行下一步,否则直接认定不需要清扫,这样能够初步判断整块光伏组件是否需要清扫,从大的方向进行把控,减少控制步骤,提高效率;
43.s3:计算相似度,通过获取的参考图像的集合中的参考图像与初始图像进行对比,然后计算其相似度,在计算时对初始图像和参考图像进行拆分,把其拆分成100个子图像,然后进行标记,标记后对每组子图像进行对比,相似度低于80%的子图像区域则需要进行清扫,通过计算初始图像与光伏组件参考图像的相似度来确定光伏组件区域是否需要清洗,实现了在光伏组件清洗时,对整个光伏组件区域的清洁程度进行分析,能够考虑光伏组件区域中的所有光伏组件的清洁状态,提高光伏组件清洗判定的准确度,方便针对不同的区域进行清洗,提高的光伏组件清洗的精度,降低了能耗;
44.s4:确定清扫区域,通过计算相似度来确定光伏组件所要清扫的区域,并发送需要清扫区域的标记信息,并输出给清扫控制器,通过清扫控制器控制清洗机器人进行清扫;
45.s5:多次清洗,通过清扫控制器控制清洗机器人进行清扫后,通过图像采集模块再次采集光伏组件参考图像,然后针对清扫区域计算其相似度,如果相似度还是不满足要求,则进行再次清扫,通过多次清洗和数据采集,能够确保待清洗区域能够得到彻底清洗达到要求;
46.s6:数据储存,相似度计算数据、灰尘堆积程度数据、和清扫次数数据都要进行数据备份,并进行统计整理,以便后期查看。
47.本发明的s1中参考图像的集合至少为两个光伏组件参考图像,相邻两次获取的参考图像的时间间隔为4天,s2中包括灰尘堆积程度计算模块,灰尘堆积程度计算模块与图像采集模块相连接,s3中包括图像预处理模块和相似度计算模块,相似度计算模块连接有信号传输模块,信号传输模块连接有清扫控制器,s5中再次清扫后再次进行采集光伏组件参考图像,然后进行相似度计算,在清扫三次后还不满足需要则进行警情上报。
48.需要特别说明的是,s5中包括告警单元,告警单元与相似度计算模块相连,通过告警单元的设置能够在多次清洗都达不到要求时进行告警,通知工作人员进行处置,及时解决问题,s6中对数据进行整理后进行数据分析,针对经常需要清洗的区域进行程序设计,定期进行清洗。
49.在该文中的描述中,需要说明的是,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
50.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1