驱动正弦机构匀速往复运动的非圆齿轮节曲线设计方法
1.本发明属于机械设计与制造技术领域,涉及正弦机构的驱动齿轮设计方法,具体涉及驱动正弦机构匀速往复运动的非圆齿轮节曲线设计方法。
背景技术:
2.正弦机构是一种较为普遍的运动机构,可以应用在纺织机械、印刷机械、造纸机械中,正弦机构若采用普通圆柱齿轮驱动,则其机架的速度呈现典型的正弦变化规律,但是在很多场合,需要正弦机构输出等速往复直线运动,这就需要对正弦机构采用变输入转速进行驱动,经常采用的方式有三种:一是一对椭圆齿轮串联一对减速圆柱齿轮、二是一对卵形齿轮、三是一个椭圆齿轮与一个卵形齿轮进行组合,而以上三种驱动方式下,正弦机构输出的是近似等速往复直线运动,为了改善运动特性,实现精确的等速往复直线运动,采用自由节曲线的非圆齿轮驱动正弦机构运动是一种比较理想的选择。
3.进行自由节曲线的设计是工程中的难点,现有技术的方案是首先设定主要结构参数或运动参数,例如曲柄长度、中心距、加速及减速运动段的升程角等,然后编制程序,根据机架的往复运动规律用分段函数来表达运动速度,在此基础上计算非圆齿轮的节曲线,约束关系较多,推算过程繁琐,需要编制程序进行计算,对于广大的工程人员来讲,编程的难度较大,限制了自由节曲线的非圆齿轮在实际当中的应用。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种驱动正弦机构匀速往复运动的非圆齿轮节曲线设计方法,联合应用creo、excel、origin、ug nx实现节曲线的设计,不需要编程,计算简便,能够实现系列化的快速设计。
5.为了实现上述目的,本发明采用以下技术方案予以实现:
6.驱动正弦机构匀速往复运动的非圆齿轮节曲线设计方法,包括以下步骤:
7.步骤一:在creo软件中绘制理想运动速度曲线,曲线横坐标为主动轮的转角,纵坐标为机架的平动速度;
8.步骤二:提取理想运动速度曲线上的起始点,沿着理想运动速度曲线进行点的阵列,将理想运动速度曲线转换为点集,并保存为iges格式;
9.步骤三:提取点集的坐标值:在creo软件中新建模型文件,将iges格式的点集文件导入,点集中的点采用笛卡尔坐标的形式进行表示,并将点集保存为pts格式,用记事本打开pts格式的文件,提取点的坐标值;
10.步骤四:提取工作行程所对应的点集坐标数据:将点的坐标数据导入excel文件中,并将主动轮转角的角度值转化为弧度值;
11.步骤五:获取曲柄长度:将步骤四中的数据导入origin中,点击analysis—mathematics—integrate进行积分操作,将积分值除以主动轮的转速,得到位移值,工作行程的最大位移是曲柄长度的2倍,查看最大位移值,获得曲柄长度数据;
12.步骤六:计算每一个位移值对应的从动轮转角:将位移值复制到excel中进行计算,计算每一个位移值所对应的从动轮转角从动轮转角与位移s、曲柄长度e所满足的关系如下:
[0013][0014]
步骤七:计算传动比:计算每一组数据相对于上一组数据中主动轮转角的增量从动轮转角的增量则主从动轮的传动比为:
[0015][0016]
步骤八:计算主动轮的向径、从动轮的向径:根据曲柄长度e设定一个合理的非圆齿轮中心距a,按照下式计算主动轮的向径r1、从动轮的向径r2;
[0017][0018][0019]
步骤九:将主动轮、从动轮的转角及所对应的向径值转化为笛卡尔坐标值,在excel中进行计算,计算公式为:
[0020][0021][0022]
步骤十:将坐标点以样条曲线的形式导入ug nx软件,并分别将两条曲线进行镜像,得到主动轮节曲线、从动轮节曲线,将从动轮节曲线平移,得到相切的主动轮、从动轮节曲线。
[0023]
优选的,所述的步骤一中在理想运动速度曲线的直线交接处进行倒圆角操作。
[0024]
优选的,所述的步骤二中阵列采用曲线阵列的形式,将运动曲线等分为360份。
[0025]
优选的,所述的步骤四中提取前181组数据进行分析。
[0026]
优选的,所述的步骤七中对于主动轮转角时,从动轮转角该位置处的传动比可以认为是的极限值,根据洛必达法则计算,公式如下:
[0027][0028]
优选的,所述的步骤十中采用三次样条曲线将坐标点倒入ug nx软件。
[0029]
优选的,所述的步骤十中从动轮节曲线平移的距离为主动轮和从动轮的中心距。
[0030]
本发明与现有技术相比,具有如下技术效果:
[0031]
本发明在作图软件中直接绘制正弦机构输出的运动曲线,然后导出坐标点后进行
一系列的数据处理,最后得到机构的关键结构参数,反求出非圆齿轮的节曲线;本方法联合应用creo、excel、origin、ug nx实现节曲线的设计,不需要编程,计算简便,能够实现系列化的快速设计。
附图说明
[0032]
图1为非圆齿轮驱动正弦机构示意图;
[0033]
图2为理想运动速度曲线图;
[0034]
图3为理想运动速度曲线的阵列点集;
[0035]
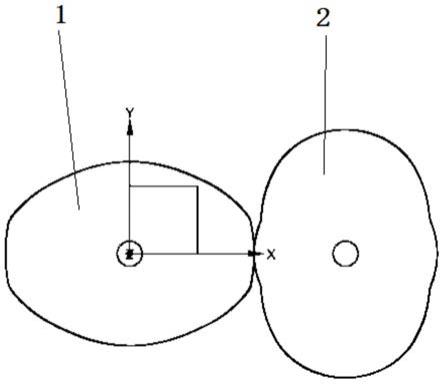
图4为获得的主动轮和从动轮的节曲线示意图;
[0036]
图中各标号的含义为:1
‑
主动轮,2
‑
从动轮,3
‑
曲柄,4
‑
滑块,5
‑
导轨,6
‑
机架,7
‑
支撑座。
具体实施方式
[0037]
以下结合实施例对本发明的具体内容做进一步详细解释说明。
[0038]
如图1至图4所示,本实施例给出驱动正弦机构匀速往复运动的非圆齿轮节曲线设计方法,包括以下步骤:
[0039]
步骤一:设定主动轮转速ω1,本例设定为360
°
/s,在creo软件中绘制正弦机构输出的理想运动速度曲线,曲线横坐标为主动轮转角单位为
°
,纵坐标为机架的平动速度v,单位为cm/s;
[0040]
为了避免刚性冲击,需要保证运动曲线的光滑,在直线的交接处进行倒圆角操作,这样保证了速度是平滑过渡的,如图2所示;
[0041]
步骤二:提取理想运动速度曲线上的起始点,沿着理想运动速度曲线进行点的阵列,将理想运动速度曲线转换为点集,并保存为iges格式;阵列数为361,这样就将其运动曲线等分为360份,如图3所示;
[0042]
步骤三:提取点集的坐标值:在creo软件中新建模型文件,将iges格式的点集文件导入,点集中的点采用笛卡尔坐标的形式进行表示,并将点集保存为pts格式,用记事本打开pts格式的文件,提取点的坐标值,坐标数据如表1所示;
[0043]
表1点的坐标值
[0044][0045]
步骤四:提取工作行程所对应的点集坐标数据:将表1所示的点的坐标数据导入excel文件中,因为工作行程与回程的速度大小相同,方向相反,所以只需提取前181组数据,并将主动轮转角的角度值转化为弧度值,如表2所示;
[0046]
表2工作行程的运动规律
[0047][0048][0049]
步骤五:获取曲柄长度:将步骤四中表2所示数据导入origin中,点击analysis—mathematics—integrate进行积分操作,将积分值除以主动轮的转速,即2π(rad/s),得到
位移值,如表3所示;
[0050]
表3工作行程的位移值
[0051][0052]
工作行程的最大位移是曲柄长度e的2倍,查看前181组数据点,得到最大位移值为17.16451843cm,故正弦机构的曲柄长度为85.82259215mm;
[0053]
步骤六:计算每一个位移值对应的从动轮转角:将位移值复制到excel中进行计算,计算每一个位移值所对应的从动轮转角从动轮转角与位移s、曲柄长度e所满足的关系如下:
[0054][0055]
步骤七:计算传动比:计算每一组数据相对于上一组数据中主动轮转角的增量从动轮转角的增量则主从动轮的传动比计算公式为:
[0056][0057]
对于主动轮转角时,从动轮转角该位置处的传动比可以认为是的极限值,根据洛必达法则,该位置处的传动比计算公式为:
[0058][0059]
步骤八:计算主动轮的向径r1、从动轮的向径r2:根据曲柄长度e设定一个合理的非圆齿轮中心距a,假设中心距为80mm,按照下式计算主动轮的向径r1、从动轮的向径r2;
[0060][0061][0062]
步骤九:将主动轮、从动轮的转角及所对应的向径值转化为笛卡尔坐标值,在
excel中进行计算,计算公式为:
[0063][0064][0065]
计算得到的主动轮节曲线坐标数据如表4所示,从动轮节曲线坐标数据如表5所示;
[0066]
表4主动轮节曲线坐标数据
[0067][0068][0069]
表5从动轮节曲线坐标数据
[0070]
序号x2y2z2133.94725400233.945890.4905680333.9256870.9810010433.9172611.4715320533.8836121.9611970
……………………
180
‑
33.947270.4905890181
‑
33.9371700
[0071]
步骤十:将坐标点以样条曲线的形式导入ug nx软件,并分别将两条曲线进行镜像,得到主动轮节曲线、从动轮节曲线,将从动轮节曲线平移中心距的长度80mm,得到相切的主动轮、从动轮节曲线,如图4所示。
[0072]
然后设计其它数据,完成匀速往复运动的非圆齿轮驱动正弦机构的设计,如图1所示,匀速往复运动的非圆齿轮驱动正弦机构的工作原理为:主动轮1驱动从动轮2旋转,从动轮2带动曲柄3变速旋转,使滑块4在导轨5中移动,从而带动机架6往复运动,支撑座7起到支承机架6的作用。
[0073]
需要说明的是,以上实施例并非本发明的全部实施方式,在不脱离本发明构思的前提下,本领域技术人员所做出的推演或替换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1