一种振动图像驱动的滚动轴承智能故障诊断方法
1.本发明涉及机械故障诊断领域,特别是涉及滚动轴承故障诊断方向,具体涉及一种emd-aadpc(empirical mode decomposition-adaptive angle distribution polar coordinate,经验模态分解-自适应角度分配极坐标)振动图像与cnn(convolutional neural network,卷积神经网络)的滚动轴承故障诊断方法
背景技术:
2.机械装备的安全运行是现代工业生产的重要保障,轴承作为机械装备中必不可少的一部分,滚动轴承的故障诊断技术受到极大的关注。滚动轴承一般由内圈、外圈、滚动体和保持架组成,在经过长时间的运转工作后易发生多种故障,故对滚动轴承故障的快速、精确识别是一项巨大的挑战,并且具有重要的意义。
3.传统的滚动轴承故障诊断主要是通过对振动信号进行信号处理以获得特征信息,不同类型的振动信号一般会选择不同的分析算法;随着深度学习等智能算法的迅速发展,并与各学科进行交叉融合,智能诊断方法在机械故障诊断上受到广泛应用,相比较传统故障诊断方法,它没有严格的先验知识要求,能够减小对人工特征提取的依赖。cnn是一种前馈型神经网络,它具有良好的提取数据特征表示的能力,在处理图像时表现出其优越性,故出现了以图像数据驱动分类模型的诊断方法;现有振动图像驱动的方法中,其振动图像样本在不同状态数据间的特征表现不明确,所包含特征信息单一,无法自适应的增强样本特征等问题。
技术实现要素:
4.本发明的目的在于提供一种振动图像驱动的滚动轴承智能故障诊断方法,以解决现有技术存在的问题,本发明能够实现滚动轴承故障的智能、准确及高效诊断。
5.为达到上述目的,本发明采用如下技术方案:
6.一种振动图像驱动的滚动轴承智能故障诊断方法,包括以下步骤;
7.步骤1)采集实验平台振动数据,并构建滚动轴承振动信号数据集;
8.步骤2)对步骤1)获得的振动数据进行emd-aadpc图像转换,得到二维振动图像样本集,并将其按预设比例划分为训练集、验证集及测试集;
9.步骤3)构建用于分类识别的卷积神经网络模型;
10.步骤4)输入步骤2)中得到的训练集对卷积神经网络模型进行训练,再根据验证集测试结果进行超参数调试,最终保存最佳分类模型;
11.步骤5)将步骤2)中得到的测试集输入步骤4)所得的最佳分类模型中进行测试。
12.进一步地,所述步骤1)具体为:规划振动传感器布置,包括故障轴承近端位置布置及故障轴承远端位置布置;再进行上位机参数配置,进行数据采集并按照4类轴承状态进行整理,从而构建滚动轴承振动信号数据集,所述4类轴承状态分别为正常状态、内圈故障、外圈故障与滚动体故障。
13.进一步地,所述步骤2)具体包括:
14.步骤2.1)数据段划分:将步骤1)得到的滚动轴承振动信号数据集进行数据段划分,即每一类故障状态的数据集划分为n段,其中第i段表示为ni,每一段数据的长度为n;
15.步骤2.2)数据emd降噪:对第i段数据进行emd分解,得到若干组经验模态分量imf,依次计算每一组imf与第i段数据的相关性,并按照相关性由高到低排列,取前6组imf进行叠加得到降噪后的数据段,依次对n组数据段分别进行降噪处理得到降噪后的数据dni,所述前6组imf分别为imf1~imf6;
16.步骤2.3)计算步骤2.2)中各imf的时域指标区别率:对n组dni经emd分解得到的6组imf,分别计算每组imf的时域指标a~l,时域指标a~l中每组包含6项imf的时域指标,分别求n个imf1~imf6时域特征值的平均值得到时域指标a~l的向量,再计算该向量的标准差得到a~l,a~l定义为4类轴承状态下数据各imf对应10项时域指标a~l的区别率,其意义为imf1~imf6之间的特征值的区别程度,a~l越大则区别程度越大,反之则越小,取区别率最大的时域指标为zbs;
17.步骤2.4)emd-aadpc振动图像生成:将步骤2.3)中的imf1~imf6按下式依次进行aadpc转换,如imf1将转换得到极坐标点p1(θ(i),γ(i)),计算公式如下式,
[0018][0019][0020]
式中:θ(i)与γ(i)分别为第i个数据点在极坐标中对应的角度与半径值;x
max
为振动参量最大值;x
min
为振动参量最小值;a为时间间隔;xi为第i个振动参量值;x
i+a
为第i+a个振动参量值;取值范围3~10;adp为角度自适应率,其定义为:步骤2.3)中imf1~imf6所对应时域指标平均值数据组进行归一化后,得到包含6个值的向量adp1~adp6,adp1~adp6依次对应imf1~imf6的角度自适应率,其值越大,对应的imf将分配得到更多的角度因子,从而实现6个imf在极坐标上不同程度的分布效果;b为角度放大系数,取π/90;为初始偏转角度;
[0021]
步骤2.5)样本集的划分:将经过步骤2.4)生成的emd-aadpc振动图像按照对应的故障状态分别进行划分,得到训练集、验证集与测试集,训练集作用为训练模型分类效果,验证集参与调节模型超参数,测试集为最终效果评估。
[0022]
进一步地,步骤2.3)中,每组imf的时域指标a~l共10项,分别为imf数据的最大值、最小值、平均值、峰-峰值、方差、峭度、波形因子、峰值因子、脉冲因子与裕度因子。
[0023]
进一步地,步骤2.4)中,imf1~imf6分别分配的初始偏转角度为0
°
、60
°
、120
°
、180
°
、240
°
与300
°
。
[0024]
进一步地,步骤2.4)中,归一化范围为[0.1~0.9],即将数据缩放到区间[0.1~0.9]。
[0025]
进一步地,步骤2)中预设比例为6:2:2。
[0026]
进一步地,所述步骤3)具体为,调整卷积神经网络模型的输入层参数以符合图像样本的分辨率,即保证步骤2)得到的图像样本能够被输入进卷积神经网络模型中训练;设置卷积层及池化层的训练步长为2~4,以提高数据降维速度,以减小模型训练时间,优化模
型识别效率。
[0027]
进一步地,所述步骤4)具体为:根据每次训练、测试效果分别对卷积神经网络模型参数进行调整,通过设置衰减学习率来自适应细化训练步长,从而优化训练效果;采取动量优化器momentum,加快卷积神经网络模型收敛过程并减小震荡;添加l1正则化,改善cnn训练过程出现的过拟合问题,以获得最佳模型参数。
[0028]
进一步地,所述步骤5)中以测试集的准确率、精度、召回率及f1-score作为评价指标,对步骤4)得到的最佳分类模型进行系统性评估。
[0029]
与现有技术相比,本发明具有以下有益的技术效果:
[0030]
本发明提出一种emd-aadpc振动图像与cnn的滚动轴承故障诊断方法,其中提出的emd-aadpc振动图像生成方法与传统振动图像相比,具有计算简便、图像分辨率高、自适应程度明显及囊括信号特征全面等优点,通过观察emd-aadpc振动图像的形貌即可精确反映滚动轴承的运行状态,进而实现机械故障诊断,故该振动图像样本生成方法对旋转机械故障模式识别、状态监测方面均具有重要意义。
[0031]
本发明针对传统方法需要人工提取特征值,以及必须具备一定的先验知识的问题,采用emd-aadpc振动图像结合cnn来实现智能故障诊断;针对cnn网络对训练样本要求严格的特点,本发明使用的训练样本具有一定的样本间差异性,即更容易被模型网络识别出;针对cnn网络训练速度缓慢及容易过拟合的问题,本发明大胆的提高卷积及池化的步长,提高了模型训练速度,并在训练中加入了正则化环节以防止模型过拟合。结果显示本发明能够实现滚动轴承的高效、智能、准确的诊断。
附图说明
[0032]
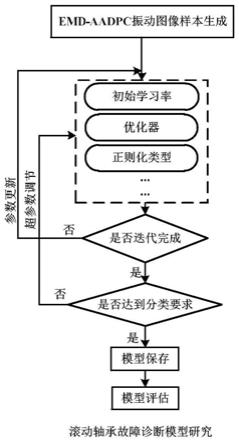
图1是本发明的cnn滚动轴承故障分类流程示意图;
[0033]
图2是本发明所使用的emd-aadpc振动图像生成示意图;
[0034]
图3是本发明的emd-aadpc振动图像样本制备示意图;
[0035]
图4是本发明所使用的emd-aadpc振动图像样本展示;
[0036]
图5是本发明所采用cnn模型结构图,其中(a)为正常状态,(b)为内圈故障,(c)为外圈故障,(d)为滚动体故障。
具体实施方式
[0037]
下面对本发明作进一步详细描述:
[0038]
一种振动图像驱动的滚动轴承智能故障诊断方法,该方法包括以下步骤:
[0039]
步骤1)采集实验平台振动数据,并构建滚动轴承振动信号数据集;
[0040]
具体操作为,规划振动传感器布置,包括故障轴承近端位置布置及故障轴承远端位置布置;再进行上位机参数配置,进行数据采集并按照4类轴承状态(即正常状态、内圈故障、外圈故障与滚动体故障)进行整理,从而构建滚动轴承振动信号数据集。
[0041]
步骤2)构建振动图像样本集,对步骤1)获得的振动数据进行emd-aadpc图像转换,得到二维振动图像样本集,并将其按6:2:2划分为训练集、验证集及测试集;
[0042]
具体操作为,(1)数据段划分:将步骤1)得到的滚动轴承振动信号数据集进行数据段划分,即每一类(共s类)故障状态的数据集划分为n段,其中第i段表示为ni,每一段数据
的长度为n;步骤(2)数据emd降噪:对第i段数据进行emd分解,得到若干组经验模态分量(imf),依次计算每一组imf与第i段数据的相关性,并按照相关性由高到低排列,取前6组imf(即imf1~imf6)进行叠加得到降噪后的数据段,依次对n组数据段分别进行降噪处理得到降噪后的数据dni;步骤(3)计算步骤2.2)中各imf的时域指标区别率:对n组dni经emd分解得到的6组imf,分别计算每组imf的时域指标a~l(共10项时域指标a~l分别为(imf)数据的最大值、最小值、平均值、峰-峰值、方差、峭度、波形因子、峰值因子、脉冲因子与裕度因子),时域指标a~l中每组包含6项imf的时域指标,分别求n个imf1~imf6时域特征值的平均值得到时域指标a~l的向量,再计算该向量的标准差得到a~l,a~l定义为4类轴承状态下数据各imf对应10项时域指标a~l的区别率,其意义为imf1~imf6之间的特征值的区别程度,a~l越大则区别程度越大,反之则越小,取区别率最大的时域指标为zbs;步骤(4)emd-aadpc振动图像生成:emd-aadpc是将振动数据点在极坐标上,按角度放大因子进行表示得到的振动图像,
[0043]
将步骤2.3)中的imf1~imf6按下式依次进行aadpc转换,如imf1将转换得到极坐标点p1(θ(i),γ(i)),计算公式如下式,
[0044][0045][0046]
式中:θ(i)与γ(i)分别为第i个数据点在极坐标中对应的角度与半径值;x
max
为振动参量最大值;x
min
为振动参量最小值;a为时间间隔;xi为第i个振动参量值;x
i+a
为第i+a个振动参量值;取值范围3~10;adp为角度自适应率,其定义为:步骤2.3)中imf1~imf6所对应时域指标平均值数据组进行归一化(归一化范围为[0.1~0.9],即将数据缩放到区间[0.1~0.9])后,得到包含6个值的向量adp1~adp6,adp1~adp6依次对应imf1~imf6的角度自适应率,其值越大,对应的imf将分配得到更多的角度因子,从而实现6个imf在极坐标上不同程度的分布效果;b为角度放大系数,取π/90;为初始偏转角度;
[0047]
步骤(5)样本集的划分:将经过步骤(4)生成的emd-aadpc振动图像按照对应的故障状态分别进行划分,得到比例为6:2:2的训练集、验证集与测试集,训练集作用为训练模型分类效果,验证集参与调节模型超参数,测试集为最终效果评估。
[0048]
步骤3)cnn模型搭建,使用一种卷积神经网络模型作为分类识别的基础架构;
[0049]
具体操作为,调整模型的输入层参数以符合图像样本的分辨率,即保证步骤2)得到的图像样本可以被输入进模型中训练;设置卷积层及池化层的训练步长为2~4,以提高数据降维速度,以减小模型训练时间,优化模型识别效率。
[0050]
步骤4)获取最优参数并保存最佳分类模型,输入步骤2)中得到的训练集进行模型训练,再根据验证集测试结果进行超参数调试,最终保存最佳分类模型;
[0051]
具体操作为,根据每次训练、测试效果分别对网络模型参数进行调整,通过设置衰减学习率来自适应细化训练步长,从而优化训练效果;采取动量优化器momentum,加快了模型收敛过程并减小震荡;添加l1正则化,改善了cnn训练过程出现的过拟合问题,以获得最佳模型参数。
[0052]
步骤5)最佳分类模型的性能评估:将步骤2)中得到的测试集输入步骤4)所得的最
佳分类模型中进行测试,以测试集的准确率、精度、召回率及f1-score作为评价指标。
[0053]
本发明结合cnn实现滚动轴承的智能诊断。相比较传统方法,使用emd-aadpc振动图像作为cnn模型输入样本,免去了复杂的信号处理过程,却能够准确表现振动数据的特征分布,且增强了不同故障状态的样本间差异性,结合cnn模型能够实现滚动轴承的高效、智能、准确的诊断。
[0054]
下面结合具体实例对本发明做进一步详细说明,所述内容均为对本发明的解释,但这些说明不能被理解为限制了本发明的范围,本发明的保护范围由随附的权利要求书限定,任何在本发明权利要求基础上的改动就是本发明的保护范围。
[0055]
参见附图1,本发明的方法主要包含如下步骤:
[0056]
1)本发明提供的方法,通过使用振动图像作为模型输入样本,该方法有图像样本特征多样、样本间差异大、观察更直观等优势。采集实验室滚动轴承振动信号数据,提出一种全新的振动图像生成方案——emd-aadpc振动图像,其转换方式如图2,并将生成的图像样本按比例制作成训练、验证、测试数据集,样本制备流程如图3所示。
[0057]
2)本发明以lenet-5网络模型作为基本结构,该网络模型网络层浅、所需训练参数少,所以它训练速度快,分类效果佳,针对本发明使用的低复杂程度的振动图像样本,选择该网络是合适的。
[0058]
3)针对转换后的滚动轴承振动图像集利用cnn进行训练过程。卷积神经网络模型一般由卷积层、池化层及全连接层组成,其中卷积层是利用卷积核对图像进行卷积操作获得特征图,卷积公式如式(1)所示。
[0059][0060]
式中:为第l层中的卷积核的权重矩阵,b
(l)
为第l层的偏置,为l-1层的特征图矩阵,其两个维度坐标参数为i,j,o
l
为l层的输出特征图矩阵,k为卷积核的尺寸(k*k)。
[0061]
在卷积运算后将参数输入激活函数,增加了模型非线性度,使模型能够适用于复杂分类问题。激活函数有sigmoid、tanh及relu等,公式如式(2)所示。
[0062]yl
=f
active
(o
l(i,j)
)
ꢀꢀꢀ
(2)
[0063]
式中:f
active
为激活函数,y
l
为第l层特征图矩阵输出,o
l(i,j)
为第l层的输出。
[0064]
池化层是对输入的参数进行降维处理,即在保持原有特征的基础上最大限度的将输入参数的维数变小,常用的池化操作为最大池化与平均池化,本文中使用最大池化操作;卷积网络中的全连接层是将模型学到的分布式特征映射到样本标记空间的作用,在整个网络结构中全连接层一般充当分类器,即对全连接层的输出softmax函数,计算结果即为整个模型的输出结果,具体操作如式(3)、(4)所示。
[0065][0066]
[0067]
式中:为全连接层的特征值,i与u均表示第i、u类样本(为了区别分子与分母),为全连接层之前的特征矩阵,p(yi)为对第yi类样本概率的预测,l为样本类别总数。
[0068]
在模型训练的过程中,模型输出的预测值与实际目标的误差通过损失函数进行计算,常用的损失函数为交叉熵损失函数,计算公式如式(5)所示,式(5)中loss的值表示预测值与目标值越接近程度,loss值越小,预测越接近目标,反之则预测越偏离目标;将每次前向传播得到的损失值输入至优化器中,即通过降低损失值以达到训练效果,常用的优化器有梯度下降算法,动量优化算法等。
[0069][0070]
式中:x为输入值,m为样本总数,p(x)、q(x)分别为真实目标值及softmax的输出值。
[0071]
4)对cnn模型完成训练后,根据验证集的测试效果,针对网络敏感参数进行参数微调,再输入训练集和验证集对网络参数进行重复优化过程,最终确定网络的最佳网络参数,并进行后续模型效果验证及评估。
[0072]
实施案例
[0073]
1)试验中使用的卷积网络模型结构如图4所示,总层数为7层,其中包括3层卷积层、2层池化层,以及2层全连接层。在保证图像样本信息不受图像色彩的影响下,使用单通道图像可以减小网络输入参数,减小内存使用占比,提高网络计算效率,所以本发明所使用的样本大小为256*256的单通道灰度图像,振动图像样本如图5所示;输出为4个节点,即为4类轴承状态类别。在训练的过程中通过每次的训练、验证评估结果,对模型中的超参数进行微调,初始模型参数如表1所示。
[0074]
表1模型初始参数
[0075][0076][0077]
2)本发明所提出的方法针对实验室振动信号进行训练及测试过程中,识别准确率可以达到95.83%,具体评价指标见表2;
[0078]
表2实验室振动信号测试结果
[0079]
[0080]
以上结合具体实例对本发明的具体实施方式对本发明作了进一步详细说明,所述内容均为对本发明的解释但这些说明不能被理解为限制了本发明的范围,本发明的保护范围由随附的权利要求书限定,任何在本发明权利要求基础上的改动就是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1