用于道路的点云自动配准方法和相应的点云自动配准系统与流程
本发明涉及智能交通领域,尤其是涉及一种用于道路的点云自动配准方法以及一种相应的用于道路的点云自动配准系统。
背景技术:
1、如今,随着信息技术、传感器技术以及人工智能等科学技术的发展,智能交通的研究和应用受到越来越多的关注。在此,智能交通能够有效地综合应用于交通运输、服务控制和辅助驾驶,加强车辆、道路和用户之间的联系,从而保障车辆行驶的安全性并且提升交通运输的效率。
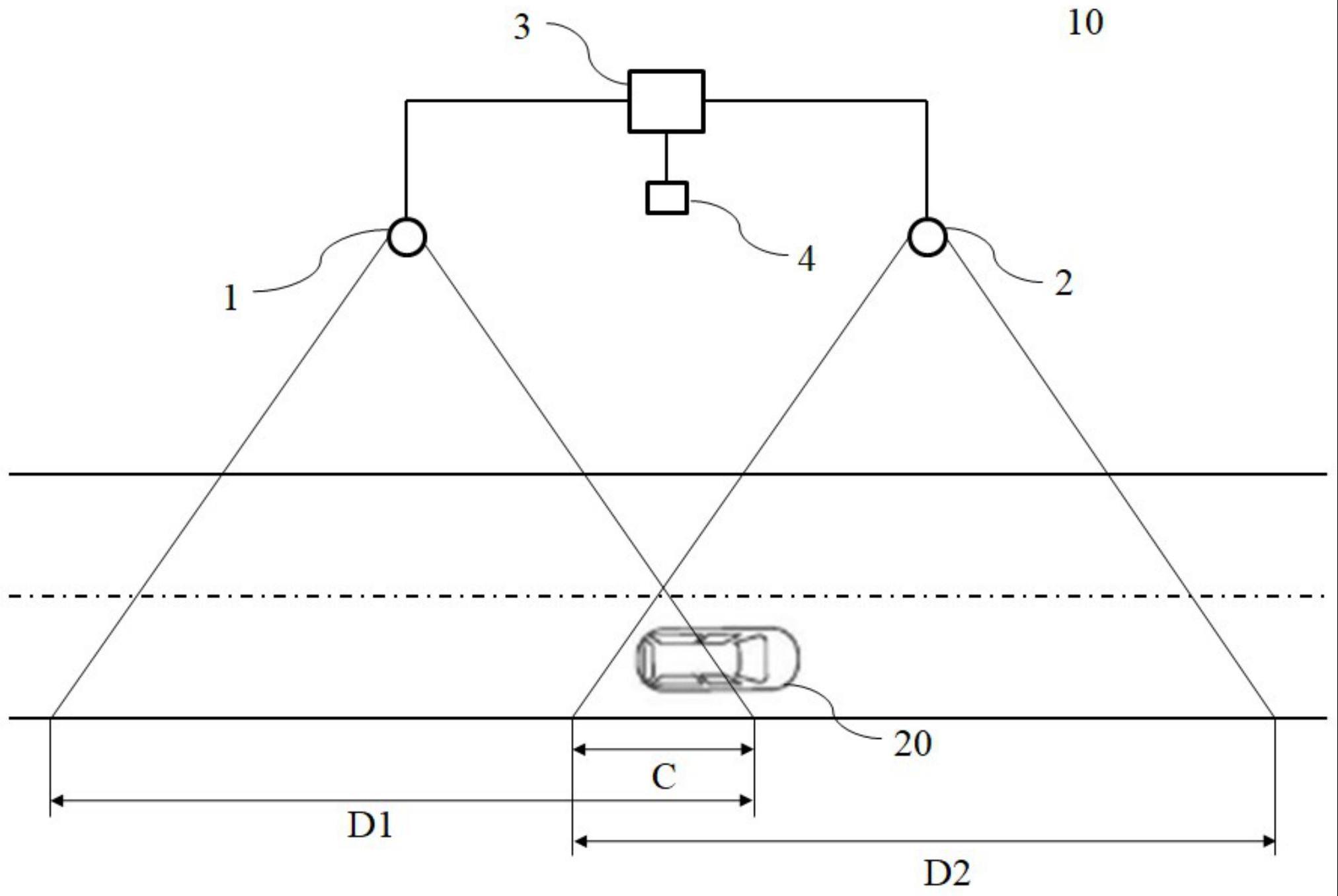
2、在智能交通中通常需要有效地感知环境信息、尤其是道路信息,从而准确识别出道车道、交通标志、交通参与者等特征。为此,通过传感器组件来获取环境数据,并且通过处理这些环境数据来识别出环境信息,其中,基于点云数据的道路识别技术具有直观、高精度的优势并且已经得到了应用。在此,用于获取点云数据的点云传感器通常设置在路边并且相邻的两个点云传感器的检测区域部分地重叠,从而确保完整地检测到整个道路。在此,各个点云传感器所获取的点云的坐标系不同。为了生成精确的点云地图并且确保环境识别的顺利进行,需要实现相邻的点云传感器之间的配准。
3、然而,点云传感器需要安装在外界环境中,因此这些点云传感器可能受到天气以及周围环境的影响,例如在经历大风后,点云传感器的安装角度可能会发生变化,这对基于点云数据生成的点云地图的精度产生不利影响,因此需要在相邻的点云传感器之间进行配准。尤其对于较长的道路,需要多个点云传感器才能够覆盖整条道路,在这种情况下的点云配准是耗费时间和成本昂贵的。此外,由于点云数据是海量数据,点云数据的处理对于处理器硬件和传输带宽造成很大的压力。在现有技术中虽然已经存在点云自动配准方法,但这些点云自动配准方法需要较长的处理时间和成本并且不能良好地实现动态的配准功能。
技术实现思路
1、因此,本发明的目的在于提出一种改进的用于道路的点云自动配准方法,所述点云自动配准方法能够在明显减小数据量的情况下有利地实现点云的动态配准并且反映真实的环境信息,由此能够在提高点云地图精度的同时节省成本并且减少配准过程的工作量和处理时间。本发明目的还在于提出一种相应的用于道路的点云自动配准系统。
2、根据本发明的第一方面,提出一种用于道路的点云自动配准方法,至少包括以下步骤:
3、第一步骤:通过第一点云传感器获取第一点云并且通过第二点云传感器获取第二点云,所述第一点云和所述第二点云部分地相互重叠;
4、第二步骤:根据所述第一点云的反射强度和/或点云密度对所述第一点云进行点云分割,以得到所述第一点云的第一点云子集;
5、第三步骤:基于所述第一点云子集和所述第二点云进行配准。
6、在本发明的框架中,“点云”应理解为通过传感器所检测的目标表面特性的点数据集合,其中,点云数据包括点云的三维坐标信息、反射强度、点云密度和颜色信息等。在此,点云可以是2d点云、3d点云或者2.5d点云。在本发明的框架中,“点云传感器”应理解为用于获取点云数据的传感器。在此,点云传感器尤其构造为激光雷达,如2d激光雷达、2.5d激光雷达、3d激光雷达。但也可以考虑,点云传感器构造为毫米波雷达。
7、根据本发明,首先由第一点云传感器获取第一点云并且由第二点云传感器获取第二点云。在此,这两个点云传感器间隔开地布置,由这两个点云传感器获取的第一点云和第二点云分别占据相应的检测区域并且部分地相互重叠,其中,各个点云分别包括相应的空间坐标信息、反射强度和密度,其中,点云的反射强度和密度取决于点云中的点对应的检测区域与点云传感器的距离,当检测区域距离点云传感器较近时,对应点的反射强度和密度相对较大,而当检测区域距离点云传感器较远时,对应点的反射强度和密度相对较小。然后根据第一点云的反射强度和/或点云密度进行点云分割,以得到第一点云的第一点云子集,该第一点云子集能够在一定程度上反映出相对于第一点云传感器的距离。在此,所述第一点云子集的边缘是不规则的,尤其当道路上出现移动的交通参与者时,所述第一点云子集会动态地变化。最后将第一点云子集与第二点云进行配准,在该配准过程中,不再需要考虑第一点云中的除第一点云子集之外的其它点云数据,由此显著地减少了要进行配准的点云数据量并且由此降低了处理时间。此外,根据反射强度和/或点云密度的点云分割能够根据道路上的实际交通情况动态地变化,从而实现点云的动态配准。
8、本发明的第二方面提出一种计算机程序产品,其包括计算器程序指令,其中,当所述计算机程序指令被一个或多于一个处理器执行时,所述处理器能够执行根据本发明所述的点云自动配准方法。
9、本发明的第三方面提出一种用于道路的点云自动配准系统,所述点云自动配准系统至少包括:
10、-至少两个点云传感器;
11、-处理器,所述处理器与所述至少两个点云传感器通信连接并且被配置成能够利用根据本发明的计算机程序产品实施点云自动配准方法。
技术特征:
1.一种用于道路的点云自动配准方法,至少包括以下步骤:
2.根据权利要求1所述的点云自动配准方法,其中,
3.根据权利要求1或2所述的点云自动配准方法,其中,
4.根据前述权利要求中任一项所述的点云自动配准方法,其中,
5.根据权利要求4所述的点云自动配准方法,其中,
6.根据权利要求4所述的点云自动配准方法,其中,
7.根据前述权利要求中任一项所述的点云自动配准方法,其中,
8.根据前述权利要求中任一项所述的点云自动配准方法,其中,
9.一种计算机程序产品,其包括计算器程序指令,其中,当所述计算机程序指令被一个或多于一个处理器执行时,所述处理器能够执行根据权利要求1-8中任一项所述的点云自动配准方法。
10.一种用于道路的点云自动配准系统(10),所述点云自动配准系统至少包括:
技术总结
本发明涉及一种用于道路的点云自动配准方法,至少包括以下步骤:通过第一点云传感器获取第一点云并且通过第二点云传感器获取第二点云,所述第一点云和所述第二点云部分地相互重叠;根据所述第一点云的反射强度和/或点云密度对所述第一点云进行点云分割,以得到所述第一点云的第一点云子集;基于所述第一点云子集和所述第二点云进行配准。本发明还涉及一种相应的计算机程序产品和一种相应的点云自动配准系统。能够在明显减小用于配准的点云数据量的同时实现点云的动态配准。
技术研发人员:梁津垚,李昕润,M·P·察普夫
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!