一种服务器节点深度视频处理结合特征深度分析的方法与流程
1.本发明涉及一种特征深度学习算法,具体是一种服务器节点深度视频处理结合特征深度分析的方法。
背景技术:
2.随着社会经济的不断发展,视频、音频、vlog等流媒体在日常生活中越来越普遍。对于不同的流媒体,如何为用户提供高质量、流畅、良好的视频质量是极其重要的。对于视频处理,它通常需要面向固定的关键帧。所谓的关键帧是随机的,也就是说,其中每一个关键帧需要从数万个帧中提取。仅仅依靠手动操作,通常会带来更多的时间和能量消耗,因此需要计算机辅助,即根据相应视频帧的特征及其自身的特征检测到相应的关键帧。如何进行有效的关键帧检测,一般方法主要包括光流法和差分法。所谓的差分法使用背景的差异来提取,但该方法对背景的要求更高,因为背景的质量好坏会影响结果;对于光流法,其自身的计算复杂度相对较大,对于数万帧,计算规模可能较大,实用性较差。由于相应技术的局限性,使用相关方法并不适合进行服务器节点的视频处理。特别是对于深度视频,在相对平坦的区域会有相应的纹理,在虚拟场景切换过程中,视角的角度会导致很多偏差,该方法也会影响服务器视频的视点质量。
技术实现要素:
3.针对以上问题,本发明的目的是提供一种服务器节点深度视频处理结合特征深度分析的方法,根据相应的模糊聚类算法对服务器视频进行特征检测,然后将相应的深度视频划分为区域,再根据角检测视频的前沿区域检测方法进行深度和颜色,最后完成每个区域的服务器视频的处理。
4.本发明的目的通过以下技术方案实现:
5.一种服务器节点深度视频处理结合特征深度分析的方法,其特征在于该方法包括以下步骤:
6.步骤1:对于非边缘像素的黑暗和亮度,进行一对一的映射;
7.步骤2:采用滤波方法,以此保留相应的节点视频深度纹理,消除不准确的深度值;
8.步骤3:利用中值滤波器,进行深度补偿;
9.步骤4:根据视频样本组成有限集x={x1,x2,
…
,xn},分类数用c表示,聚类数用mi表示;
10.步骤5:每个样本相对于所有类的隶属度之和为1;
11.步骤6:求解其中xi表示视频样本,μj表示样本权重。
12.步骤7:设置初始值:候选帧e,阈值1:θ1,阈值2:θ2;
13.步骤8:随机选择k帧:选择第0帧与第k帧间的任意两帧i帧和j帧,其中0≤i,j《k。并计算两帧的欧式距离,且当:d[i,j]《θ1时,其中θ1为设定阈值。则添加k个帧到候选帧e中,
否则,重新选择k帧。;
[0014]
步骤9:通过剩余的帧m:选取初始k个帧中的任何一帧i0,d[i0,m]《θ2将e添加到第m帧,输出候选帧集e。
[0015]
步骤(1)对于非边缘像素的黑暗和亮度,深度值的差异相对较小;在水平摄像机系统中,虚拟视点是水平绘制的,进行一对一的映射。
[0016]
步骤(2)所采用的具体滤波方法为:
[0017][0018]
其中p和q表示像素点序号。w
p
,表示各种初始设定好的权重值。iq和i
p
表示样本对应的深度值。表示组合值。
[0019]
步骤(3)在绘制服务器节点视频的虚拟视点的过程中,深度值变化很大,虚拟视点由于遮挡而会有一定的空洞,需要对这种深度补偿进行处理,否则会有损失;深度边缘先执行像素的位置和属性值,然后选择合适的中值滤波器,最后使用中值滤波器进行处理。
[0020]
步骤(4)采用的聚类准则函数为:其中xi和mj表示不同的视频样本,μ表示样本权重。b为指数系数。
[0021]
步骤(5)默认所有样本相对于所有类的隶属度之和为1,即
[0022][0023]
其中xi表示不同的视频样本,μj表示样本权重。
[0024]
步骤(6)需要求解其中xi表示视频样本,μj表示样本权重。求解的方法依照不同的需求条件并不唯一。在本专利中,我们选择迭代的方式求解上述方程。
[0025]
有益效果:本发明利用模糊均值聚类将服务器节点视频分为5类,对深度检测图进行边缘化,然后根据相应的三方使用非边缘像素。滤波器进行滤波处理,最后进行角检测和块,实现不同窗口的滤波。仿真实验结果表明,本发明引入的特征深度分析算法是有效的,可以显著提高服务器节点视频的主观质量,主观和客观质量有显著提高。
附图说明
[0026]
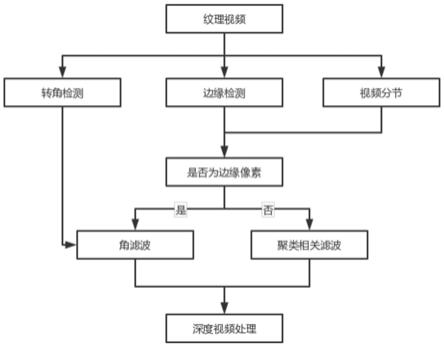
图1是本发明的方法流程图。
具体实施方式
[0027]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0028]
一种服务器节点深度视频处理结合特征深度分析的方法,一共主要由三个相互独立的算法模块组成
[0029]
1、基于fcm的深度视频自适应聚类:
[0030]
对于服务器视频节点的处理,通常需要按阈值来区分深度视频,但由于该方法不够准确,因此对背景的处理不够智能和灵活。因此,为了有效地区分深度视频的深度值,有必要进行相应的聚类,然后对深度视频进行分类。其特征在于该方法包括以下步骤:
[0031]
步骤1:假设设置了一个由相应样本组成的有限集x={x1,x2,
…
,xn},分类数用c表示,聚类数用mi表示。具体的聚类准则函数可描述为:
[0032][0033]
步骤2:每个样本相对于所有类的隶属度之和为1,如下式所示:
[0034][0035]
步骤3:在步骤2的前提下可得步骤1的解,相应的必要条件可表示为:
[0036][0037][0038]
在集群深度视频时,需要首先设置类别数,然后迭代计算,直到达到最小值或预设的相应条件,需要初始化服务器节点视频的相应特征和相应的参数。其次,进行阈值聚类分析。
[0039]
2、候选关键帧提取算法
[0040]
通过设置阈值,可以保留视频的关键帧,即通过设置相应的保留阈值。
[0041]
步骤1:候选帧设置e,阈值1:θ1,阈值2:θ2;
[0042]
步骤2:随机选择k帧:任何0≤i,j《k,d[i,j]《θ1,然后添加k个帧到设置e中,否则,重新选择k帧;
[0043]
步骤3:通过剩余的帧m:选取初始k个帧中的任何一帧i0,d[i0,m]《θ2将e添加到第m帧,输出候选帧集e。
[0044]
3、深度视频边缘像素的检测与阻塞
[0045]
步骤1:对于非边缘像素的黑暗和亮度,深度值的差异相对较小。在水平摄像机系统中,虚拟视点是水平绘制的。因此,需要进行一对一的映射。具体计算方法如下:
[0046][0047]
其中:w为窗口大小,d(x,y)是处理后的深度值,i(x,y)为窗口中像素的深度值。在
本文中,w取为5。
[0048]
步骤2:为了保留相应的节点视频深度纹理,消除不准确的深度值,我们采用相应的滤波方法进行计算,具体公式为:
[0049][0050]
在此式中:当前处理的像素点用p表示,和w
p
分别为:
[0051][0052][0053][0054][0055]
步骤3:在绘制服务器节点视频的虚拟视点的过程中,如果深度值变化很大,虚拟视点由于遮挡而会有一定的空洞。需要对这种深度补偿进行处理,否则会有损失,深度边缘需要先执行像素的位置和属性值,然后选择合适的中值滤波器,最后使用中值滤波器进行处理。
[0056]
如图1所示为本发明用于对有符号跳变的的单频复指数信号频率估计提供的方法流程图,如图1所示,用于蓝牙信号频率偏移测试的方法,包括以下步骤:
[0057]
步骤一,选择了一个三维视频测试序列;
[0058]
步骤二,利用模糊均值聚类将服务器节点视频分为5类,对深度检测图进行边缘化;
[0059]
步骤三,根据相应的三方使用非边缘像素;
[0060]
步骤四,滤波器进行滤波处理,最后进行角检测和块,实现不同窗口的滤波。
[0061]
1、客观实验结果
[0062]
使用相应的峰值信噪比和结构相似性来比较目标质量,本文提出的特征深度分析算法(dog)在客观质量方面优于其他算法。
[0063]
2、主观实验结果
[0064]
根据服务器节点视频进行深入的定制和处理,特别是在处理边缘区域时,为了保护虚拟视点的尖端,进行相应的算法处理。因此,本文提出的特征深度分析算法的主观质量也很明显。如果原始的服务器节点视频不够准确,那么为深度视频绘制的虚拟视点将会显得很一般,即使有明显的马赛克和冗余的图像。本文提出的算法可以保证边缘更加明显和完整,并使图像被强制去除冗余,与真实图像更一致。
[0065]
此外,使用本文的算法来增强视频的训练数据,可以看出,通过本文的算法,训练数据增加了一倍,耗时量也增加了
[0066]
通过比较不同训练集对应的输入,可以清楚地看到准确率提高了,但耗时性增加了。因此,需要注意的是,对于特征深度分析算法,需要综合考虑耗时和准确,满足需求即
可,不需要过多地追求精度,这会增加耗时。
[0067]
利用彩色直方图特征对透镜分割过程中欧氏距离和余弦距离的性能进行了比较。欧几里得距离法相对耗时,因此建议在服务器节点的视频处理中使用它。处理欧几里得距离。
[0068]
仿真实验证明,特征深度分析算法是有效的,并且对主观和客观质量的处理效率已得到显著提高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1