一种基于交互数据的移动对象行为模式挖掘方法与流程
1.本发明涉及移动对象数据挖掘研究与应用领域,具体涉及一种基于交互数据的 移动对象行为模式挖掘方法。
背景技术:
2.近年来随着移动互联网与iot设备的普及,物品与人的活动轨迹得以被收集, 客观真实的反应了移动对象的行为,因此基于轨迹数据的分析与挖掘使精细化运营 与更智能化的服务成为可能,给人们创造了极大的便利。而现有移动对象轨迹模式 挖掘方法主要基于摄像头、雷达等一些跟踪捕捉系统来获取移动对象的行为轨迹。 但现存轨迹获取方法不仅成本高昂,且存在泄露用户隐私的可能,在用户的私密空 间当中更无法应用。
3.而由于电子设备的普及,人的活动轨迹可以通过电子设备的交互数据间接得到, 此种获取方式避免了隐私泄露的风险。
4.因此,探索能够基于设备交互数据的移动对象行为模式挖掘方法具有重要的研 究价值与广泛的应用领域。
技术实现要素:
5.为了克服无法直接获取用户轨迹的情况下现有方法无法适用的问题,本发明提 出一种基于设备交互数据的移动对象行为模式挖掘方法,通过对移动对象与设备的 交互数据,进而捕捉人在真实空间中的运动轨迹,在通过时间阈值等手段产生候选 行为模式,使用设备位置信息、交互方式等计算出候选行为模式的可行度,最终根 据设定的可信度阈值选择出相应的候选行为。
6.为了实现上述目的,本发明采用以下技术方案:
7.一种基于交互数据的移动对象行为模式挖掘方法,包括:
8.s1,将移动对象所处空间的空间结构数据构建为无向图g=(v,e);每个子空间标 识为无向图的一个顶点v(v∈v),若两个子空间vi与vj连通,则构成无向图的一条边 (vi,vj)∈e;
9.s2,对移动对象的交互数据进行采集,存储移动对象的交互行为(d,t),其中d为 移动对象的交互行为关联设备,t表示交互行为发生的时间点;
10.s3,对空间中可进行交互的设备进行采集,记作a,并记录设备d所处空间v与位 置可靠性c,即每个设备的位置可靠性为cd;
11.s4,根据交互记录间隔时间序列产生候选行为模式;
12.s5,根据无向图g及空间信息,计算行为序列的空间可信度
13.s6,根据行为序列l所涉及的设备信息计算事件可信度
14.s7,根据时间可信度空间可信度事件可信度计算行为序列 可
31.在一些实施例中,所述s7计算行为序列可信度其中w
t
,ws,we为时间权重、空间权 重、事件权重,σ为sigmoid函数,var
l
为所有候选行为模式中行为序列1的ti的方差。
32.在一些实施例中,权重计算方法为:
33.1)人工筛选部分行为序列作为真实行为模式序列,设置其可信度为1;通过随 机生成行为序列,设置其可信度为0;
34.2)将生成的样本作为训练样本,通过训练得到w
t
,ws,we,c。
35.本技术所披露的一种基于交互数据的移动对象行为模式挖掘方法可能带来的有 益效果包括但不限于:在无法直接获取移动对象行为轨迹的情况下,可以通过移动 对象与设备的交互行为间接的对移动对象的行为轨迹进行推断,进而给用户提供更 精细化的智能服务。该发明的最终结果可以提供给相关领域的用户使用,例如智慧 家庭场景推荐、智能酒店场景等,在保护了用户隐私的同时保证智能服务的可用性。
附图说明
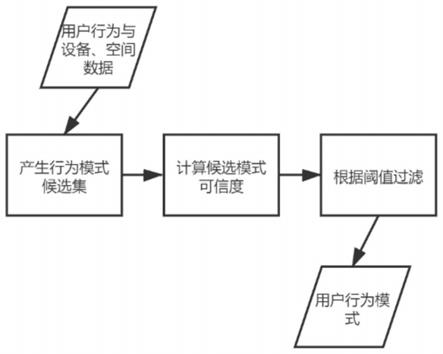
36.图1为本发明提出文件同步的处理流程图
37.具体实施方式
38.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例, 对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释 本技术,并不用于限定本技术。
39.相反,本技术涵盖任何由权利要求定义的在本技术的精髓和范围上做的替代、 修改、等效方法以及方案。进一步,为了使公众对本技术有更好的了解,在下文对 本技术的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没 有这些细节部分的描述也可以完全理解本技术。
40.以下将结合图1对本技术实施例所涉及的一种基于交互数据的移动对象行为模 式挖掘方法进行详细说明。值得注意的是,以下实施例仅仅用于解释本技术,并不 构成对本技术的限定。
41.在本技术的实施例中,如图1所示,一种基于交互数据的移动对象行为模式挖 掘方法,包括:
42.s1,将移动对象所处空间的空间结构数据构建为无向图g=(v,e);每个子空间标 识为无向图的一个顶点v(v∈v),若两个子空间vi与vj连通,则构成无向图的一条边 (vi,vj)∈e;
43.s2,对移动对象的交互数据进行采集,存储移动对象的交互行为(d,t),其中d为 移动对象的交互行为关联设备,t表示交互行为发生的时间点;
61.在一些实施例中,所述s6根据设备信息计算事件可信度方法为:
62.步骤s61:单次行为的事件可信度
63.步骤s62:行为序列1={(d1,t1),(d2,t2),(d3,t3)
…
(dm,tm)}的事件可信度 64.在一些实施例中,所述s7计算行为序列可信度其中w
t
,ws,we为时间权重、空间权 重、事件权重,σ为sigmoid函数,var
l
为所有候选行为模式中行为序列1的ti的方差。
65.在一些实施例中,权重计算方法为:
66.1)人工筛选部分行为序列作为真实行为模式序列,设置其可信度为1;通过随 机生成行为序列,设置其可信度为0;
67.2)将生成的样本作为训练样本,通过训练得到w
t
,ws,we,c。
68.本发明的整体架构如图1所示,其原理是:
69.首先根据时间间隔对用户行为序列进行筛选产生行为模式候选集。在本发明中 移动对象的行为轨迹是由一组交互行为记录组成的有序序列s,其中用户交互点位 point=(d,t),d表示可交互设备,t表示移动对象的交互行为的具体时间点。表1给 出了一组行为轨迹集合d,共包括四条交互行为轨迹。候选行为模式由一组交互行为 记录组成的有序序列p,并且p满足:移动对象交互行为之间的最大间隔 t
i+1-ti∈(ti,t
i+1
],其中ti属于预先设定的时间间隔序列t,且ti<t
i+1
。
70.表1
[0071][0072]
假设ti=50s,t
i+1
=150s,则表1所示行为轨迹可产生候选行为模式如表2所 示,那么表2中的候选行为模式的时间可行度
[0073]
表2
[0074]
[0075][0076]
根据设备的位置标识将以上行为模式转换为空间顶点序列,对于表2中标识号 3中的候选行为模式转换后的结果为{(a0,11:24:44),(a2,11:25:12),(a1,11:25:55)}, 空间大小序列为{25,16,36,16},根据空间联通关系构建的图g所示,则 [0077]
对于行为序列的事件可信度,根据设备的位置可靠度与控制方式进行计算,以 上述表2中标识号3中的候选行为模式为例,其位置可靠度序列为{0.92,0.93,0.99}, 控制方式关联度序列{0.95,0.45,0.65},则时间可信度 c
event
=(0.92*0.95)*(0.93*0.45)*(0.99*0.65)=0.2353。
[0078]
假设时间权重、空间权重、事件权重已知为 w
t
=0.9、ws=100、we=2,var
l
=1.4,则上述候选行为序列的可信度 c
l
=1.4*σ(0.9*0.02+100*0.000278+2*0.2353)=0.8768。时间权重、空间权 重、事件权重可采用机器学习的方法得到。
[0079]
可信度阈值的设置参考常规的行为模式,假设阈值δ=0.5,则上述候选行为模 式则被成为最终挖掘出来的结果之一,否则丢弃。
[0080]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的 精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范 围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1