一种基于翅片阻力特性反演的翅片加工质量检测方法与流程
1.本发明涉及一种翅片加工质量检测方法,特别涉及一种基于翅片阻力特性反演的翅片加工质量检测方法。
背景技术:
2.板翅式换热器是一种具有较高传热效率和较大单位体积换热面的换热设备,其结构较为紧凑,特别适于石化、能源以及制冷行业的应用。
3.翅片作为板翅式换热器最核心的传热单元,有多种不同的形式,如平直翅片、锯齿翅片、波纹翅片等。在翅片加工过程中,会发生模具磨损、几何尺寸、位移等微观形位误差,造成翅片高度、齿数和形状畸变等加工质量问题。目前,依靠检验员手工测量翅片的尺寸、齿数、高度和厚度,依据长期积累的技术经验,需要多次调校模具安装精度,才能达到技术要求,严重制约了翅片加工的精度与效率。
4.考虑到翅片微观结构特性与宏观流阻特性之间的映射关系,可以通过判断宏观流阻特性反向检测翅片加工质量。然而,在构造翅片标准阻力特性预测模型时,传统预测翅片在不同re数下阻力因子f的变化方法主要是通过多参数拟合的方式。由于锯齿翅片的阻力特性跟re数、翅片结构参数紧密相关,简单的拟合方法其拟合误差一般都在15%左右,无法实现对阻力特性的准确预测。实现翅片加工质量快速、准确检测成为困扰板翅式换热器生产厂家的技术难题,亟待解决。
技术实现要素:
5.本发明的目的在于提供一种基于翅片阻力特性反演的翅片加工质量检测方法,利用神经网络算法建立基于翅片阻力特性的标准检测模型反演翅片加工质量,提高对于翅片加工质量的检测效率和准确性,解决背景技术中所述的问题。
6.本发明解决其技术问题所采用的技术方案是:
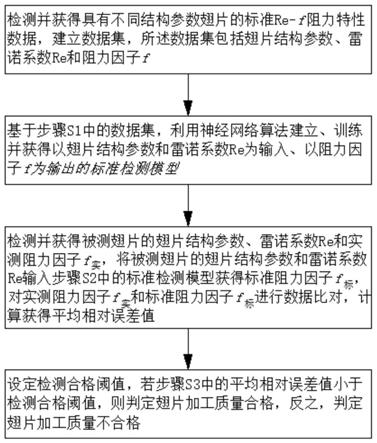
7.一种基于翅片阻力特性反演的翅片加工质量检测方法,该方法具体包括以下步骤:
8.s1.检测并获得具有不同结构参数翅片的标准re-f阻力特性数据,建立数据集,所述数据集包括翅片结构参数、雷诺系数re和阻力因子f;
9.s2.基于步骤s1中的数据集,利用神经网络算法建立、训练并获得以翅片结构参数和雷诺系数re为输入、以阻力因子f为输出的标准检测模型;
10.s3.检测并获得被测翅片的翅片结构参数、雷诺系数re和实测阻力因子f
实
,将被测翅片的翅片结构参数和雷诺系数re输入步骤s2中的标准检测模型获得标准阻力因子f
标
,对实测阻力因子f
实
和标准阻力因子f
标
进行数据比对,计算获得平均相对误差值;
11.s4.设定检测合格阈值,若步骤s3中的平均相对误差值小于检测合格阈值,则判定翅片加工质量合格,反之,判定翅片加工质量不合格。
12.作为优选,所述步骤s1中,通过翅片阻力特性测试装置进行检测,所述翅片阻力特
性测试装置包括风洞通道和与风洞通道连通的测试容器,所述风洞通道的进出口处均设有压力传感器和温度传感器,所述测试容器内部设有用于放置翅片试件的容置腔,所述测试容器外部设有压降测试部件,所述测试容器的进出口处均设有用于连接压降测试部件的取压口。
13.作为优选,所述步骤s1中,翅片结构参数包括翅片高度、翅片厚度和翅片节距。
14.作为优选,所述步骤s1中,阻力因子f通过以下公式计算获得:
[0015][0016]
式中,ρ1为入口流体密度,ρ2为出口流体密度,ρm为流体平均密度,ua为通过最小自由流通面积进入换热器的流速,σ为通道面积比,dh为翅片试件的水力直径,kc为突扩段阻力损失系数,ke为突缩段阻力损失系数。
[0017]
作为优选,所述步骤s1中,雷诺系数re通过以下公式计算获得:
[0018][0019]
式中,ua为通过最小自由流通面积进入换热器的流速,dh为翅片试件的水力直径,,v为空气运动粘度。
[0020]
作为优选,所述步骤s2中,神经网络算法中设置输入层、隐层和输出层,输入层和隐层的激活函数选用tansig函数,输出层的激活函数选用线性函数,隐层设置6个节点,单个隐层神经元的输入向量分量为翅片高度、翅片厚度、翅片节距和雷诺系数re。
[0021]
作为优选,所述隐层的输出与净输入的关系满足下式:
[0022]
yj=f(netj),
[0023]
式中,yj为第j个隐层神经元的输出,下标j表示隐层神经元的位置,netj为第j个输出层神经元的净输入,下标i表示输入层神经元的位置,,v
ij
为第i个输入层神经元和第j个隐层神经元的之间的权值,x
ij
为第i个输入层神经元到第j个隐层神经元的之间的输入,θj为第j个输出层神经元的阈值;
[0024]
所述输出层的输出与净输入的关系满足下式:
[0025]
ok=f(netk),
[0026]
式中,ok为第k个输出层神经元的输出,下标k表示输出层神经元的位置,netk为第k个输出层神经元的净输入,w
jk
为第j个隐层神经元和第k个输出层神经元的之间的权值,y
jk
为第j个隐层神经元到第k个输出层神经元的之间的输入,θk为第k个输出层神经元的阈值。
[0027]
作为优选,所述步骤s2中,训练标准检测模型中,以实际测试所得的阻力因子数据值作为输出层的期望输出,以标准检测模型计算预测所得的阻力因子数据值作为输出层的模型输出,若期望输出与模型输出不符,则将输出误差在神经网络算法中进行误差反向传播并进行权值更新和阈值更新。
[0028]
作为优选,所述步骤s2中,以均方误差值作为训练标准检测模型的误差目标,均方误差值通过以下公式计算获得:
[0029][0030]
式中,mse为均方误差值,为标准检测模型计算预测所得的阻力因子数据值,yi为实际测试所得的阻力因子数据值,n为模型验证集的数量。
[0031]
作为优选,所述步骤s3中,平均相对误差值通过以下公式计算获得:
[0032][0033]
式中,mre为平均相对误差值,yi为实际测试所得的阻力因子数据值,为标准阻力因子数据值,n为进行比对的阻力因子的数据个数。
[0034]
本发明的有益效果是:
[0035]
本发明的一种基于翅片阻力特性反演的翅片加工质量检测方法,利用神经网络算法建立基于翅片阻力特性的标准检测模型反演翅片加工质量,相对于现有技术手工测量翅片尺寸、齿数、高度和厚度的方法,提高了检测效率和检测准确性,实现对于翅片阻力特性的准确预测以及翅片加工质量快速准确的检测。
附图说明
[0036]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0037]
图1是本发明的方法流程图;
[0038]
图2是本发明翅片阻力特性测试装置的结构示意图;
[0039]
图3是本发明神经网络算法的拓扑结构图;
[0040]
图4是本发明的检测流程图。
[0041]
图中:1、风洞通道,2、测试部件,3、流量计,4、第一压力传感器,5、温湿度传感器,6、压降测试部件,7、温度传感器,8、第二压力传感器。
具体实施方式
[0042]
下面通过具体实施例,并结合附图,对本发明的技术方案作进一步的具体说明。应当理解,本发明的实施并不局限于下面的实施例,对本发明所做的任何形式上的变通和/或改变都将落入本发明保护范围。
[0043]
在本发明中,若非特指,所有的份、百分比均为重量单位,所采用的设备和原料等均可从市场购得或是本领域常用的。下述实施例中的方法,如无特别说明,均为本领域的常规方法。下述实施例中的部件或设备如无特别说明,均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
[0044]
实施例1:
[0045]
如图1所示的一种基于翅片阻力特性反演的翅片加工质量检测方法,该方法具体包括以下步骤:
[0046]
s1.检测并获得具有不同结构参数翅片的标准re-f阻力特性数据,建立数据集,所述数据集包括翅片结构参数、雷诺系数re和阻力因子f;
[0047]
s2.基于步骤s1中的数据集,利用神经网络算法建立、训练并获得以翅片结构参数和雷诺系数re为输入、以阻力因子f为输出的标准检测模型;
[0048]
s3.检测并获得被测翅片的翅片结构参数、雷诺系数re和实测阻力因子f
实
,将被测翅片的翅片结构参数和雷诺系数re输入步骤s2中的标准检测模型获得标准阻力因子f
标
,对实测阻力因子f
实
和标准阻力因子f
标
进行数据比对,计算获得平均相对误差值;
[0049]
s4.设定检测合格阈值,若步骤s3中的平均相对误差值小于检测合格阈值,则判定翅片加工质量合格,反之,判定翅片加工质量不合格。
[0050]
通过上述技术方案,利用神经网络算法建立基于翅片阻力特性的标准检测模型反演翅片加工质量,提高了检测效率和检测准确性。
[0051]
实施例2:
[0052]
如图1所示的一种基于翅片阻力特性反演的翅片加工质量检测方法,该方法具体包括以下步骤:
[0053]
s1.检测并获得具有不同结构参数翅片的标准re-f阻力特性数据,建立数据集,所述数据集包括翅片结构参数、雷诺系数re和阻力因子f;
[0054]
s2.基于步骤s1中的数据集,利用神经网络算法建立、训练并获得以翅片结构参数和雷诺系数re为输入、以阻力因子f为输出的标准检测模型;
[0055]
s3.检测并获得被测翅片的翅片结构参数、雷诺系数re和实测阻力因子f
实
,将被测翅片的翅片结构参数和雷诺系数re输入步骤s2中的标准检测模型获得标准阻力因子f
标
,对实测阻力因子f
实
和标准阻力因子f
标
进行数据比对,计算获得平均相对误差值;
[0056]
s4.设定检测合格阈值,若步骤s3中的平均相对误差值小于检测合格阈值,则判定翅片加工质量合格,反之,判定翅片加工质量不合格。
[0057]
以锯齿形翅片的加工质量检测为例,首先搭建一套可以实现翅片阻力特性快速检测的测试装置,通过翅片阻力特性测试装置进行检测,如图2所示,翅片阻力特性测试装置包括风洞通道1和用于放置翅片试件的测试部件2,风洞通道1的进口处依次设有第一压力传感器4和温湿度传感器5,风洞通道1的出口处依次设有温度传感器7、第二压力传感器和流量计3,风洞通道1由不锈钢管道以及相关阀件组成,测试部件内部设有用于装载待测翅片的容置腔,待测翅片与测试部件平行放置,测试部件外部设有用于测试待测翅片进出口压差的压降测试部件6,测试容器的进出口处均设有用于连接压降测试部件6的取压口,压降测试部件6为差压变送器。
[0058]
然后利用翅片阻力特性测试装置测得不同翅片结构参数下的标准re-f力特性数据,包括:
[0059]
(1)阻力因子f
[0060]
将翅片试件安装在测试装置内,由安装在流道的进出口差压变送器测得δp,再根据如下公式可得流动阻力系数f:
[0061][0062]
式中,ρ1为入口流体密度(单位:kg/m3),ρ2为出口流体密度(单位:kg/m3),ρm为流体平均密度(单位:kg/m3),
[0063]
由下式可得到ρm:
[0064]
ρm=(ρ1+ρ2)/2
[0065]
同时,进出口密度ρ1和ρ2通过检测流道进出口温度(t1,t2)和压力(p1,p2)利用空气状态方程计算得到。
[0066]
突扩段阻力损失系数和突缩段阻力损失系数可由下式计算得到:
[0067]
kc=0.42(1-σ2)
[0068]
ke=(1-σ2)2[0069]
ua为通过最小自由流通面积进入换热器的流速。
[0070]
可由下式得到ua:
[0071]
ua=qa/a
free
[0072]
式中,a
free
(单位m2)为锯齿翅片迎风面的自由流通面积,qa为翅片试件入口体积流量(单位:m3/s)。
[0073]
在实际测试中,试件入口压力大而出口压力小,试件出口的空气密度比入口处小,即流量计测得的试件出口空气流量q2要大于试件入口空气流量q1(≈qa),且两者近似存在关系:
[0074][0075]
故可得qa。
[0076]
(2)雷诺系数re
[0077]
首先获得测试试件的水力直径dh(单位:m)。可由下式计算得到dh:
[0078][0079]
式中,pf为翅片节距、hf为翅片高度、tf为翅片厚度。
[0080]
然后,根据下式计算得到锯齿翅片迎风面的自由流通面积a
free
(单位m2):
[0081][0082]
式中,w为测试试件的宽度(单位m),n为翅片层数。
[0083]
由以上测量、计算所获得参数,可以计算出测试工况下的雷诺系数re:
[0084][0085]
式中,af为翅片流动面积(单位:m2/s),v是空气运动粘度(单位:m2/s)。
[0086]
故根据以上可以得到不同翅片结构参数下的re-f阻力特性数据。
[0087]
基于人工神经网络方法训练得到以re数及翅片结构参数为输入,阻力因子f为输出的标准检测模型,具体过程如下:
[0088]
在获得n个样本的条件下,首先,确定神经网络的输入和输出:
[0089]
神经网络输入层的输入表示为:
[0090]
x=[x1,x2,x3,x4]
[0091]
神经网络输出层的输出表示为:
[0092]
o=[o1]
[0093]
如图3所示的用于预测阻力因子f的神经网络拓扑结构图,神经网络的前向结构由输入层,隐层(1层),输出层组成,其中,隐层设置6个节点。网络模型输入节点与隐含节点的激活函数选用tansig函数,输出层激活函数选用线性函数。
[0094]
tansig函数形式为:
[0095][0096]
具体地,单个隐层神经元输入向量表示为:
[0097]
x=[x1,x2,x3,x4]
[0098]
式中,x表示单个隐层神经元的输入向量,向量分量x1为翅片节距pf,x2为翅片高度hf,x3为翅片厚度tf,x4为雷诺数re。
[0099]
单个隐层神经元输出向量表示为:
[0100]
y=[y1,y2,y3,y4,y5,y6]
[0101]
输入层到单个隐层神经元之间的权值矩阵表示为:
[0102]
v=[v1,v2,v3,v4]
[0103]
神经网络隐层的净输入可表示为:
[0104][0105]
式中,下标i表示输入层神经元的位置,下标j表示隐层神经元的位置,netj表示为第j个输出层神经元的净输入,v
ij
为第i个输入层神经元到第j个隐层神经元之间的权值,x
ij
为第i个输入层神经元到第j个隐层神经元的之间的输入,θj为第j个输出层神经元的阈值。
[0106]
隐层的输出与净输入的关系可表示为:
[0107]
yj=f(netj) j=1,2,3,4,5,6
[0108]
式中,net为隐层神经元的净输入,y为隐层神经元输入,下标j为所属隐层神经元的位置,f为激活函数。
[0109]
输出层输入即为隐层的输出,单个输出层神经元的输入向量表示为:
[0110]
y=[y1,y2,y3,y4,y5,y6]
[0111]
输出层只有一个神经元,输出层输出向量表示为:
[0112]
o=[o1]
[0113]
o表示神经网络输出层的输出向量,o1为神经网络所预测的阻力因子数据f
预
。
[0114]
输出层的期望输出表示为:
[0115]
d=[d1]
[0116]
式中,d为期望的输出向量,d1为经测试装置所测得的实际阻力因子数据f
实
。
[0117]
隐层到单个输出层神经元之间的权值矩阵表示为:
[0118]
w=[w1,w2,w3,w4,w5,w6]
[0119]
输出层的净输入表示为:
[0120][0121]
式中,下标j表示隐层神经元的位置,下标k表示输出层神经元的位置,netk表示为第k个输出层神经元的净输入,w
jk
为第j个隐层神经元和第k个输出层神经元的之间的权值,y
jk
为第j个隐层神经元到第k个输出层神经元的之间的输入,θk为第k个输出层神经元的阈值。
[0122]
输出层的输出与净输入的关系可表示为:
[0123]
ok=f(netk)k=1
[0124]
式中,下标k表示输出层神经元的位置,netk表示为第k个输出层神经元的净输入,ok为第k个输出层神经元的输出。
[0125]
将所得到的样本数据代入模型进行训练,若输出层的期望输出d与神经网络输出o不符,则转入误差的反向传播阶段:
[0126]
网络输出误差表示为:
[0127][0128]
式中,下标k表示输出层神经元的位置。
[0129]
将以上误差展开至输入层进一步可表示为:
[0130][0131]
式中,w为输出层神经元的输入权值,v为隐层神经元的输入权值,x为隐层神经元输入,y为输出层神经元输入,θ为神经元的阈值,f1为隐层的激活函数,f2为输出层的激活函数,下标i表示输入层神经元的位置,下标j表示隐层神经元的位置,下标k表示输出层神经元的位置。
[0132]
权值更新:
[0133]wjknew
=w
jkold
+δw
jk j=1,2,3,4,5,6;k=1
[0134]vijnew
=v
ijold
+δv
ij i=1,2,3,4;j=1,2,3,4,5,6
[0135]
式中,w
new
和v
new
为更新后的输出层神经元输入权值和隐层神经元的输入权值,δw为输出层神经元的输入权值的改变量,δv为隐层神经元的输入权值的改变量,w
new
和v
new
为更新后的输出层神经元输入权值和隐层神经元的输入权值,w
old
和v
old
为更新前的输出层神经元输入权值和隐层神经元的输入权值,下标i表示输入层神经元的位置,下标j表示隐层
神经元的位置,下标k表示输出层神经元的位置。
[0136]
阈值θ更新:
[0137]
θ
jnew
=θ
jold
+δθ
j j=1,2,3,4,5,6
[0138]
θ
knew
=θ
kold
+δθ
k k=1
[0139]
式中,δθ为神经元阈值的改变量,θ
new
和θ
old
分别为更新后和更新前神经元的阈值,下标j表示隐层神经元的位置,下标k表示输出层神经元的位置。
[0140]
以均方误差mse作为训练的误差目标,表征预测值与实际值之间的偏差:
[0141]
均方误差mse表示为:
[0142][0143]
式中,为神经网络的预测阻力因子数据f
预
,yi为测试装置所测得的阻力因子实际值f
实
,n为模型验证集的数量;
[0144]
最后,当mse的最小值达到可接受的程度范围内,模型训练完毕,即可生成标准检测模型。
[0145]
以上述标准检测模型为基准,通过对比待检测翅片阻力特性方式完成翅片加工质量检测,首先测得待检测翅片得结构参数,然后利用上述所搭建的翅片阻力特性测试装置,进行阻力因子测试,获得待检测翅片在不同re数下阻力因子f变化数据,将待检测翅片的结构参数及re数输入标准检测模型获得标准翅片因子数据f
标
,将实验测得的f因子数据与标准翅片f因子数据比对,计算两者的平均相对误差mre值:
[0146][0147]
式中,yi为测试装置测得的阻力因子数据f
实
,为标准翅片阻力因子数据f
标
,n为比对的阻力因子的数据个数。
[0148]
依据mre是否在允许的误差范围内,判定翅片质量是否合格,实现翅片加工质量检测,上述加工质量检测流程如图4所示。一般情况下,若mre值控制在10%以内,即可认定为合格。在实际运用过程中,检测偏差阈值的选取需要根据实际情况考虑加工条件、产品需求等因素。
[0149]
以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1