一种AGV任务分配方法及存储介质与流程
一种agv任务分配方法及存储介质
技术领域
1.本发明涉及工业机器人领域,具体涉及一种agv任务分配方法及存储介质。
背景技术:
2.在自动化agv调度系统中,可以有多个客户端同时操作,每个客户端可一次性发送多个任务,由中央调度系统统一负责任务的分配以及agv的调度。在传统的任务分配过程中,大都是直接依据任务点搜寻直线距离最近的空闲状态的agv来进行分配任务。在较大的场景中时,此类分配方式可能导致分配到较远的agv,导致增加agv空载率,从而降低agv的使用率和现场任务效率。
3.现有的任务分配方案需要进一步调整。
技术实现要素:
4.本发明的第一个发明目的在于克服现有的agv任务分配方案可能增加agv空载率,降低agv的使用率和现场任务效率的问题,提供一种新的agv任务分配方法。
5.为实现以上发明目的,本发明采取以下技术方案:
6.一种agv任务分配方法,包括以下步骤:中央调度系统接收预执行任务mwill,并查找预执行任务mwill的起始位置范围l内的空闲agv,当范围l内没有空闲agv,则筛选离mwill起始位置距离最近的agv1和正在执行任务ming并且任务结束位置离起始位置最近的agv2,比较两agv筛选出最短损耗时间cost的agv来预执行任务mwill。
7.与现有技术相比,本发明的agv任务分配方法通过筛选离起始位置距离最近的agv和正在执行任务并且任务结束位置离起始位置最近的agv,通过比较两者筛选出所损耗时间cost最少的agv,这样,能有效提升现场任务效率,从而提升agv使用率并减少较远agv到达起始位置的空载率。
8.优选的,所述中央调度系统根据agv1与mwill起始位置之间的距离s1,以及agv1的平均速度v1计算出agv到达mwill起始位置所需要的时间t1,公式为t1=s1/v1;
9.所述央调度系统根据agv2的正在执行任务ming的结束位置与mwill的起始位置之间的距离s2、agv2的平均速度v2,以及执行ming所需的剩余时间t3,计算出agv2到达mwill起始位置所需时间t2;公式为t2=s2/v2+t3;
10.比较t1和t2获得最短损耗时间cost。
11.优选的,s1为agv1到预执行任务mwill的起始位置的直线距离。或者,s1为agv1到预执行任务mwill的起始位置的路径长度。
12.优选的,s2为ming结束位置到mwill的起始位置的直线距离。或者,s2为agv1到预执行任务mwillde起始位置的路径长度。
13.优选的,所述范围l根据任务场地的最长边距离l1和场地内的agv数量获得,公式为l=l1/agv数量。这样,可根据agv密度调整l的范围,提升系统的运行效率。
14.本发明的第一个发明目的在于提供一种存储介质,其上存储有计算机程序,该计
算机程序被处理器执行时实现上述方案的agv任务分配方法。
附图说明
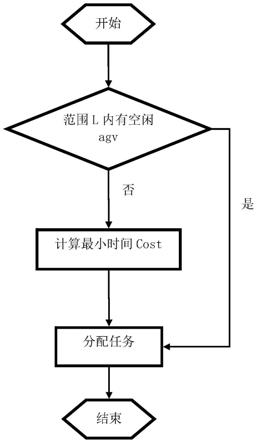
15.图1是本发明的流程简图。
具体实施方式
16.以下根据附图,进一步的说明本发明的技术方案:
17.参见图1所示,本发明公开了一种agv任务分配方法,包括以下步骤:中央调度系统接收预执行任务mwill,并查找预执行任务mwill的起始位置范围l内的空闲agv,当范围l内没有空闲agv,则筛选离mwill起始位置距离最近的agv1和正在执行任务ming并且任务结束位置离起始位置最近的agv2,比较两agv筛选出最短损耗时间cost的agv来预执行任务mwill。
18.上述中央调度系统根据agv1与mwill起始位置之间的距离s1,以及agv1的平均速度v1计算出agv到达mwill起始位置所需要的时间t1,公式为t1=s1/v1。
19.上述央调度系统根据agv2的正在执行任务ming的结束位置与mwill的起始位置之间的距离s2、agv2的平均速度v2,以及执行ming所需的剩余时间t3,计算出agv2到达mwill起始位置所需时间t2,公式为t2=s2/v2+t3;
20.比较t1和t2获得最短损耗时间cost。
21.上述s1为agv1到预执行任务mwill的起始位置的直线距离。或者,s1为agv1到预执行任务mwillde起始位置的路径长度。
22.上述s2为ming结束位置到mwill的起始位置的直线距离。或者,s2为agv1到预执行任务mwillde起始位置的路径长度。
23.可设置的l值决定了中央调度系统查找的范围,当l为0时,整个场地的agv都在筛选范围内,当l设为大于场地最大直径时,则不适用本发明的任务分配方法,因此,需适当设置l的值。在通常情况下,l的设定与场地的大小成正比,场地越大,则适当地将l值增大,能有效地提升agv的有效运行率。
24.上述范围l根据任务场地的最长边距离l1和场地内的agv数量获得,公式为l=l1/agv数量。举例说明:即当场地为100m
×
200m,agv数量为20辆,则l=10(单位:m)。
25.与现有技术相比,本发明的agv任务分配方法通过筛选离起始位置距离最近的agv和正在执行任务并且任务结束位置离起始位置最近的agv,通过比较两者筛选出所损耗时间cost最少的agv,这样,能有效提升现场任务效率,从而提升agv使用率并减少较远agv到达起始位置的空载率。
26.本发明公开了一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述实施例的agv任务分配方法。
27.根据上述说明书的揭示和教导,本发明所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
技术特征:
1.一种agv任务分配方法,其特征在于,包括以下步骤:中央调度系统接收预执行任务mwill,并查找预执行任务mwill的起始位置范围l内的空闲agv,当范围l内没有空闲agv,则筛选离mwill起始位置距离最近的agv1和正在执行任务ming并且任务结束位置离起始位置最近的agv2,比较两agv前往起始位置所损耗时间,筛选出最短损耗时间cost的agv来预执行任务mwill。2.根据权利要求1所述的agv任务分配方法,其特征在于,所述中央调度系统根据agv1与mwill起始位置之间的距离s1,以及agv1的平均速度v1计算出agv到达mwill起始位置所需要的时间t1,公式为t1=s1/v1;所述央调度系统根据agv2的正在执行任务ming的结束位置与mwill的起始位置之间的距离s2、agv2的平均速度v2,以及执行ming所需的剩余时间t3,计算出agv2到达mwill起始位置所需时间t2,公式为t2=s2/v2+t3;比较t1和t2获得最短损耗时间cost。3.根据权利要求2所述的agv任务分配方法,其特征在于,s1为agv1到预执行任务mwill的起始位置的直线距离;或,s1为agv1到预执行任务mwill的起始位置的路径长度。4.根据权利要求4所述的agv任务分配方法,其特征在于,s2为ming结束位置到mwill的起始位置的直线距离;或,s2为agv1到预执行任务mwillde起始位置的路径长度。5.根据权利要求1所述的agv任务分配方法,其特征在于,所述范围l根据任务场地的最长边距离l1和场地内的agv数量获得,公式为l=l1/agv数量。6.存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现根据权利要求1-5中任一项所述的agv任务分配方法。
技术总结
本发明公开了一种AGV任务分配方法及存储介质,方法包括以下步骤:中央调度系统接收预执行任务Mwill,并查找预执行任务Mwill的起始位置范围L内的空闲AGV,当范围L内没有空闲AGV,则筛选离Mwill起始位置距离最近的AGV1和正在执行任务Ming并且任务结束位置离起始位置最近的AGV2,筛选出两AGV中前往起始位置所损耗时间最少的执行该任务。本发明的AGV任务分配方法通过筛选离起始位置距离最近的AGV和正在执行任务并且任务结束位置离起始位置最近的AGV,通过比较两者筛选出所损耗时间Cost最少的AGV,这样,能有效提升现场任务效率,提升AGV使用率并减少较远AGV到达起始位置的空载率。载率。载率。
技术研发人员:欧阳长志
受保护的技术使用者:广东嘉腾机器人自动化有限公司
技术研发日:2021.11.22
技术公布日:2022/4/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1