裂缝检测方法、装置及设备与流程
本技术涉及图像处理,具体涉及一种裂缝检测方法、装置及设备。
背景技术:
1、道路或墙壁等建筑物上出现裂缝会影响建筑物的寿命,甚至会威胁到使用该建筑物的人员的人身安全。因此,需要对建筑物上的裂缝进行检测,从而对产生裂缝的建筑物进行维修,降低建筑物上的进一步损坏带来的风险。
2、传统的裂缝检测主要依赖于人工巡检。近年来,随着科技手段不断加入,还可以采用道路检测车和无人机等智能设备进行裂缝检测。
3、然而,无论是人工巡检还是借助智能设备进行裂缝检测,都需要投入人力物力,检测成本高。
技术实现思路
1、本技术提供了一种裂缝检测方法、装置及设备,以降低裂缝检测成本。
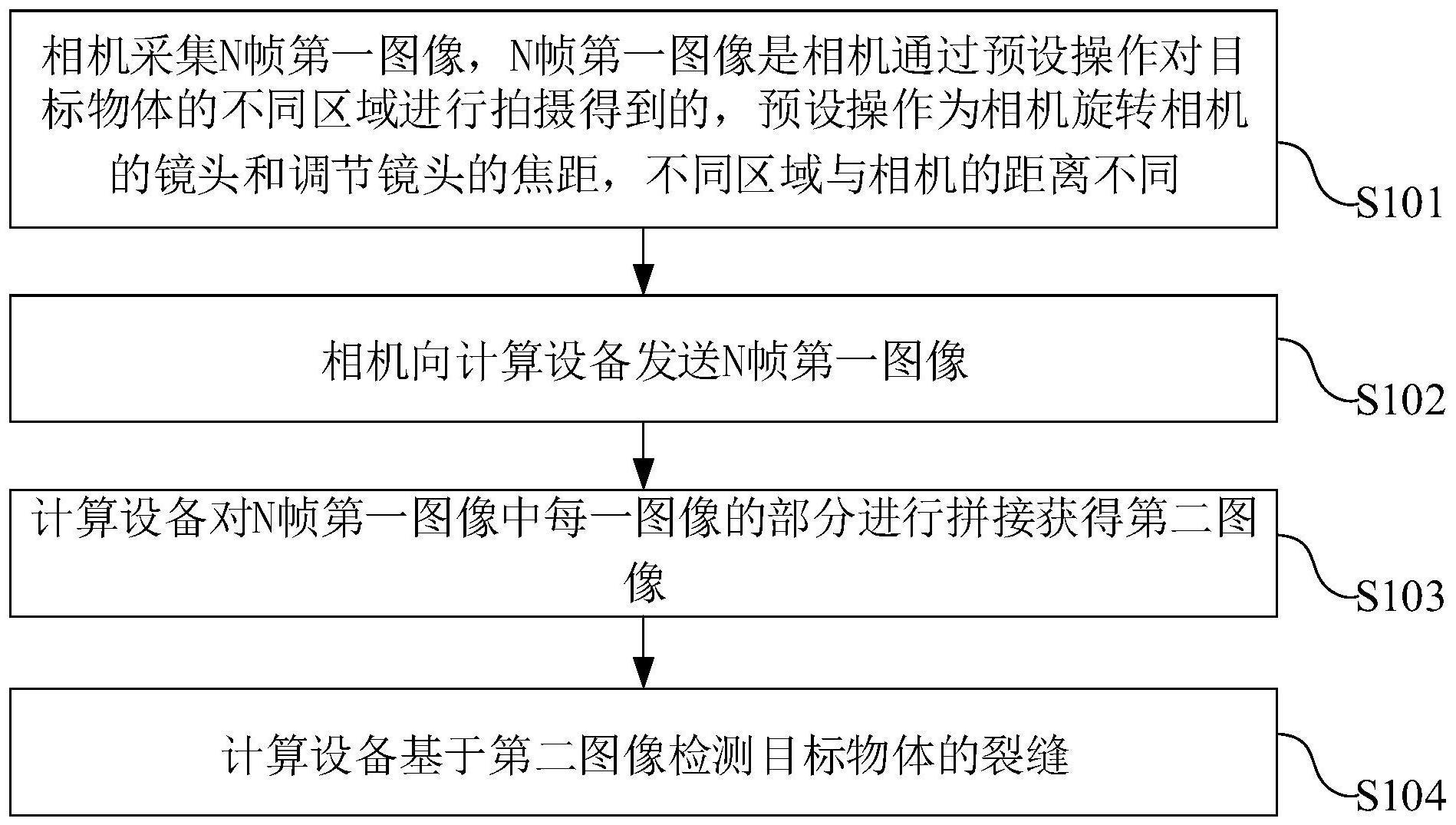
2、第一方面提供一种裂缝检测方法。该方法由相机和计算设备执行。相机与计算设备连接,相机用于采集第一图像,计算设备用于基于第一图像提取裂缝。具体地,该方法包括:相机采集n帧第一图像。n为大于或等于2的整数。n帧第一图像是相机通过预设操作对目标物体的不同区域进行拍摄得到的。其中,目标物体例如为道路、墙体等。预设操作为旋转相机的镜头和调节镜头的焦距。目标物体不同区域与相机的距离不同,区域与相机的距离与镜头的焦距呈正比。具体而言,通过旋转相机的镜头选中目标物体的区域,并且改变相机的镜头的焦距:对于与相机越远的区域,镜头的焦距越大;对于与相机越近的区域,镜头的焦距越小。从而使得不同的第一图像中的目标物体均能够清晰地呈现。相机采集到n帧第一图像后发送到计算设备,计算设备对n帧第一图像中每一图像的部分进行拼接获得第二图像。计算设备基于第二图像检测目标物体的裂缝。从而无需人工检测,能够节省人力物力,降低裂缝检测成本。
3、结合第一方面,在本技术的第一方面的第一种实现方式中,第二图像为无透视效果的图像。由于相机镜头的透视现象会造成相机拍摄到的目标物体有远小近大的效果,造成远处的目标物体细节丢失,无法准确检测出裂缝,将n帧第一图像拼接获得无透视效果的第二图像,则会使远处的目标物体的细节也能得到清晰呈现,基于第二图像进行裂缝检测也会更加准确。
4、结合第一方面或第一方面的第一种实现方式,在本技术的第一方面的第二种实现方式中,计算设备对n帧第一图像中每一图像的部分进行拼接获得第二图像包括:计算设备分别截取n帧第一图像的m行像素,m为大于或等于1的整数。计算设备将n帧第一图像的m行像素拼接获得第二图像。从而能够快速地拼接得到第二图像。
5、结合第一方面或第一方面的第一种实现方式,在本技术的第一方面的第三种实现方式中,计算设备对n帧第一图像中每一图像的部分进行拼接获得第二图像包括:计算设备分别截取n帧第一图像中每一图像的部分像素,其中,每一图像被截取的像素数量不同。计算设备将n帧第一图像中每一图像的部分像素进行拼接获得第二图像。每一第一图像的部分像素对应于目标物体的一个子区域,第二图像中包括由n个子区域组成的完整的目标物体。由于每一第一图像对应的相机位姿和焦距不同,则每一第一图像中截取的像素数量可以不同。
6、结合第一方面或第一方面的第一种实现方式,在本技术的第一方面的第四种实现方式中,计算设备对n帧第一图像中每一图像的部分进行拼接获得第二图像包括:计算设备分别截取n帧第一图像的p个像素,p为大于或等于1的整数。计算设备将n帧第一图像的p个像素拼接获得第二图像。从每一第一图像中截取相同数量的像素,能够快速地拼接得到第二图像。
7、结合第一方面或第一方面的第一至第四任一种实现方式,在本技术的第一方面的第五种实现方式中,计算设备基于第二图像检测目标物体的裂缝包括:计算设备对第二图像进行预处理,得到j个第一图像块,第一图像块中包括目标物体的部分,j为大于或等于1的整数。计算设备对每一第一图像块进行处理,得到j个第二图像块,第二图像块中标记有裂缝的至少部分对应的目标像素。计算设备合并j个第二图像块,得到第三图像。计算设备提取第三图像中的目标像素,得到裂缝。通过将第二图像分块,并分别对图像块进行处理,能够降低外部环境对目标物体中裂缝的提取造成的影响,提高裂缝检测的准确性。
8、结合第一方面的第五种实现方式,在本技术的第一方面的第六种实现方式中,计算设备对每一第一图像块进行处理,得到j个第二图像块包括:计算设备利用区域生长算法对第一图像块中的像素进行分类,得到k个像素集合,每一像素集合中包括至少一个像素,k为大于或等于1的整数。计算设备分别获取k个像素集合的平均灰度值,平均灰度值为像素集合中像素的灰度值的平均值。计算设备确定k个像素集合中像素数量最多的像素集合对应的平均灰度值为灰度阈值。计算设备将平均灰度值小于灰度阈值的像素集合中的像素的灰度值设为第一灰度值,将平均灰度值大于或等于灰度阈值的像素集合中的像素的灰度值设为第二灰度值,得到第二图像块。其中,第一灰度值可以为0,第二灰度值可以为255。或者,第一灰度值为255,第二灰度值为0。将图像块中的裂缝对应的像素筛选出来,然后将其灰度值赋值为第一灰度值,从而完成图像块的二值化,即对裂缝对应的像素进行标记。
9、结合第一方面的第六种实现方式,在本技术的第一方面的第七种实现方式中,计算设备利用区域生长算法对图像块中的像素进行分类,得到k个像素集合包括:计算设备将图像块转换为三维点云。计算设备获取三维点云中每一三维点的邻域半径,邻域半径为三维点云中的目标三维点与l个邻域三维点之间的欧式距离的平均值,l个邻域三维点为目标三维点对应的像素相邻的l个像素对应的三维点,l为大于或等于4的整数。计算设备获取三维点云的搜索半径,搜索半径为三维点云中所有三维点的邻域半径的平均值。计算设备根据搜索半径对三维点云中的三维点进行分类,得到k个三维点集合对应的k个像素集合。每个图像块根据自身的三维点云的特征得到对应的搜索半径,从而能够更加准确地将该图像块中的三维点分类,将图像块中的裂缝对应的三维点分割出来。
10、结合第一方面的第七种实现方式,在本技术的第一方面的第八种实现方式中,根据搜索半径对三维点云中的三维点进行分类,得到k个三维点集合对应的k个像素集合包括:确定三维点云中未被分类的一个三维点为种子点。以种子点为中心,将位于种子点的搜索半径内的三维点分类到种子点所在的目标三维点集合。确定所目标三维点集合中的一个未作为种子点的三维点为种子点,返回以种子点为中心,将位于种子点的搜索半径内的三维点划入种子点对应的目标三维点集合的步骤。直至目标三维点集合中不存在三维点未作为种子点,返回确定三维点云中未被分类的一个三维点为种子点的步骤。
11、第二方面提供一种裂缝检测方法。该方法应用于相机,该方法包括:相机采集n帧第一图像。n为大于或等于2的整数。n帧第一图像是相机通过预设操作对目标物体的不同区域进行拍摄得到的。其中,目标物体例如为道路、墙体等。预设操作为相机旋转相机的镜头和调节镜头的焦距。目标物体不同区域与相机的距离不同,区域与相机的距离与镜头的焦距呈正比。具体而言,通过旋转相机的镜头选中目标物体的区域,并且改变相机的镜头的焦距:对于与相机越远的区域,镜头的焦距越大;对于与相机越近的区域,镜头的焦距越小。从而使得不同的第一图像中的目标物体均能够清晰地呈现。相机对n帧第一图像中每一图像的部分进行拼接获得第二图像。相机基于第二图像检测目标物体的裂缝。从而无需人工检测,能够节省人力物力,降低裂缝检测成本。
12、结合第二方面,在本技术的第二方面的第一种实现方式中,第二图像为无透视效果的图像。由于相机镜头的透视现象会造成相机拍摄到的目标物体有远小近大的效果,造成远处的目标物体细节丢失,无法准确检测出裂缝,将n帧第一图像拼接获得无透视效果的第二图像,则会使远处的目标物体的细节也能得到清晰呈现,基于第二图像进行裂缝检测也会更加准确。
13、结合第二方面或第二方面的第一种实现方式,在本技术的第二方面的第二种实现方式中,相机对n帧第一图像中每一图像的部分进行拼接获得第二图像包括:相机分别截取n帧第一图像的m行像素,m为大于或等于1的整数。相机将n帧第一图像的m行像素拼接获得第二图像。从而能够快速地拼接得到第二图像。
14、结合第二方面或第二方面的第一种实现方式,在本技术的第二方面的第三种实现方式中,相机对n帧第一图像中每一图像的部分进行拼接获得第二图像包括:相机分别截取n帧第一图像中每一图像的部分像素,其中,每一图像被截取的像素数量不同。相机将n帧第一图像中每一图像的部分像素进行拼接获得第二图像。每一第一图像的部分像素对应于目标物体的一个子区域,第二图像中包括由n个子区域组成的完整的目标物体。由于每一第一图像对应的相机位姿和焦距不同,则每一第一图像中截取的像素数量可以不同。
15、结合第二方面或第二方面的第一种实现方式,在本技术的第二方面的第四种实现方式中,相机对n帧第一图像中每一图像的部分进行拼接获得第二图像包括:相机分别截取n帧第一图像的p个像素,p为大于或等于1的整数。相机将n帧第一图像的p个像素拼接获得第二图像。从每一第一图像中截取相同数量的像素,能够快速地拼接得到第二图像。
16、结合第二方面或第二方面的第一至第四任一种实现方式,在本技术的第二方面的第五种实现方式中,相机基于第二图像检测目标物体的裂缝包括:相机对第二图像进行预处理,得到j个第一图像块。第一图像块中包括目标物体的部分,j为大于或等于1的整数。其中,预处理可以是分块,也可以是滤波和分块。相机对每一第一图像块进行处理,得到j个第二图像块,第二图像块中标记有子裂缝对应的目标像素。子裂缝为裂缝的一部分。相机合并j个第二图像块,得到第三图像。相机提取第三图像中的目标像素,得到裂缝。通过将第二图像分块,并分别对图像块进行处理,能够降低外部环境对目标物体中裂缝的提取造成的影响,提高裂缝检测的准确性。
17、结合第二方面的第五种实现方式,在本技术的第一方面的第六种实现方式中,目标像素为灰度值为第一灰度值的像素,相机对每一第一图像块进行处理,得到j个第二图像块包括:相机利用区域生长算法对第一图像块中的像素进行分类,得到k个像素集合。其中,每一像素集合中包括至少一个像素,k为大于或等于1的整数。相机分别获取k个像素集合的平均灰度值,平均灰度值为像素集合中像素的灰度值的平均值。相机确定k个像素集合中像素数量最多的像素集合对应的平均灰度值为灰度阈值。相机将平均灰度值小于灰度阈值的像素集合中的像素的灰度值设为第一灰度值,将平均灰度值大于或等于灰度阈值的像素集合中的像素的灰度值设为第二灰度值,得到第二图像块。其中,第一灰度值可以为0,第二灰度值可以为255。或者,第一灰度值为255,第二灰度值为0。将图像块中的裂缝对应的像素筛选出来,然后将其灰度值赋值为第一灰度值,从而完成图像块的二值化,即对裂缝对应的像素进行标记。
18、结合第二方面的第六种实现方式,在本技术的第二方面的第七种实现方式中,相机利用区域生长算法对图像块中的像素进行分类,得到k个像素集合包括:相机将图像块转换为三维点云。相机获取三维点云中每一三维点的邻域半径。邻域半径为三维点云中的目标三维点与l个邻域三维点之间的欧式距离的平均值,l个邻域三维点为目标三维点对应的像素相邻的l个像素对应的三维点。l为大于或等于4的整数。相机获取三维点云的搜索半径,搜索半径为三维点云中所有三维点的邻域半径的平均值。相机根据搜索半径对三维点云中的三维点进行分类,得到k个三维点集合对应的k个像素集合。每个图像块根据自身的三维点云的特征得到对应的搜索半径,从而能够更加准确地将该图像块中的三维点分类,将图像块中的裂缝对应的三维点分割出来。
19、结合第二方面的第七种实现方式,在本技术的第二方面的第八种实现方式中,根据搜索半径对三维点云中的三维点进行分类,得到k个三维点集合对应的k个像素集合包括:确定三维点云中未被分类的一个三维点为种子点。以种子点为中心,将位于种子点的搜索半径内的三维点分类到种子点所在的目标三维点集合。确定所目标三维点集合中的一个未作为种子点的三维点为种子点,返回以种子点为中心,将位于种子点的搜索半径内的三维点划入种子点对应的目标三维点集合的步骤。直至目标三维点集合中不存在三维点未作为种子点,返回确定三维点云中未被分类的一个三维点为种子点的步骤。
20、第三方面提供一种裂缝检测装置。该装置包括采集模块、拼接模块和检测模块。其中,采集模块用于采集n帧第一图像。n帧第一图像是相机通过预设操作对目标物体的不同区域进行拍摄得到的。预设操作为相机旋转相机的镜头和调节镜头的焦距,不同区域与相机的距离不同。n为大于或等于2的整数。拼接模块,用于对n帧第一图像中每一图像的部分进行拼接获得第二图像。检测模块,用于基于第二图像检测目标物体的裂缝。
21、结合第三方面,在本技术的第三方面的第一种实现方式中,第二图像为无透视效果的图像。由于相机镜头的透视现象会造成相机拍摄到的目标物体有远小近大的效果,造成远处的目标物体细节丢失,无法准确检测出裂缝,将n帧第一图像拼接获得无透视效果的第二图像,则会使远处的目标物体的细节也能得到清晰呈现,基于第二图像进行裂缝检测也会更加准确。
22、结合第三方面或第三方面的第一种实现方式,在本技术的第三方面的第二种实现方式中,拼接模块具体用于:分别截取n帧第一图像的m行像素,m为大于或等于1的整数。将n帧第一图像的m行像素拼接获得第二图像。
23、结合第三方面或第三方面的第一种实现方式,在本技术的第三方面的第三种实现方式中,拼接模块具体用于:分别截取n帧第一图像中每一图像的部分像素,其中,每一图像被截取的像素数量不同。将n帧第一图像中每一图像的部分像素进行拼接获得第二图像。
24、结合第三方面或第一方面的第一种实现方式,在本技术的第三方面的第四种实现方式中,拼接模块具体用于:分别截取n帧第一图像的p个像素,p为大于或等于1的整数。将n帧第一图像的p个像素拼接获得第二图像。
25、结合第三方面或第三方面的第一至第四任一种实现方式,在本技术的第三方面的第五种实现方式中,检测模块具体用于:对第二图像进行预处理,得到j个第一图像块,第一图像块中包括目标物体的部分,j为大于或等于1的整数。对每一第一图像块进行处理,得到j个第二图像块,第二图像块中标记有裂缝的至少部分对应的目标像素。合并j个第二图像块,得到第三图像。提取第三图像中的目标像素,得到裂缝。
26、结合第三方面的第五种实现方式,在本技术的第三方面的第六种实现方式中,检测模块具体还用于:利用区域生长算法对第一图像块中的像素进行分类,得到k个像素集合,每一像素集合中包括至少一个像素,k为大于或等于1的整数。分别获取k个像素集合的平均灰度值,平均灰度值为像素集合中像素的灰度值的平均值。确定k个像素集合中像素数量最多的像素集合对应的平均灰度值为灰度阈值。将平均灰度值小于灰度阈值的像素集合中的像素的灰度值设为第一灰度值,将平均灰度值大于或等于灰度阈值的像素集合中的像素的灰度值设为第二灰度值,得到第二图像块。
27、结合第三方面的第六种实现方式,在本技术的第三方面的第七种实现方式中,检测模块具体还用于:将图像块转换为三维点云。获取三维点云中每一三维点的邻域半径,邻域半径为三维点云中的目标三维点与l个邻域三维点之间的欧式距离的平均值,l个邻域三维点为目标三维点对应的像素相邻的l个像素对应的三维点,l为大于或等于4的整数。获取三维点云的搜索半径,搜索半径为三维点云中所有三维点的邻域半径的平均值。根据搜索半径对三维点云中的三维点进行分类,得到k个三维点集合对应的k个像素集合。
28、结合第三方面的第七种实现方式,在本技术的第三方面的第八种实现方式中,检测模块具体还用于:确定三维点云中未被分类的一个三维点为种子点。以种子点为中心,将位于种子点的搜索半径内的三维点分类到种子点所在的目标三维点集合。确定所目标三维点集合中的一个未作为种子点的三维点为种子点,返回以种子点为中心,将位于种子点的搜索半径内的三维点划入种子点对应的目标三维点集合的步骤。直至目标三维点集合中不存在三维点未作为种子点,返回确定三维点云中未被分类的一个三维点为种子点的步骤。
29、第四方面提供一种裂缝检测设备。该裂缝检测设备包括处理器和存储器,处理器耦接存储器,处理器被配置为基于存储在存储器中的指令,执行上述的第一方面或其任一种实现方式的裂缝检测方法。
30、第五方面提供一种计算机可读存储介质。该计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行以实现上述第一方面或其任一实现方式的裂缝检测方法,或实现上述第二方面或其任一实现方式的裂缝检测方法。
- 还没有人留言评论。精彩留言会获得点赞!