换电车辆的轮距调节方法、系统、电子设备及存储介质与流程
本发明涉及车辆换电领域,特别涉及一种换电车辆的轮距调节方法、系统、电子设备及存储介质。
背景技术:
1、现在电动汽车越来越受到消费者的欢迎,电动汽车使用的能源基本上为电能,电动汽车在电能使用完后需要充电,由于现在电池技术和充电技术的限制,电动汽车充满电需要花费较长的时间,不如燃油汽车直接加油简单快速。因此,为了减少用户的等待时间,在电动汽车的电能快耗尽时更换电池是一种有效的手段。为了便于给电动汽车更换电池,满足电动汽车的换电需求,需要建造换电站,以便于电动汽车的电池包在亏电时,可以通过驶入换电站进行换电。
2、换电站设置有换电举升平台,该换电举升平台可以抬高电动汽车,换电站的换电小车在电动汽车的下方进行换电操作。由于电动汽车驶入换电举升平台的过程中会出现左右偏行的问题,因此会对换电举升平台上的电动汽车进行位置调整,具体来说,在换电前会对换电举升平台在电动汽车的宽度方向上进行轮距调整来使电动汽车在宽度方向上与换电小车对齐。
3、一般的调整方式是驱动装置通过一较大的力来驱动换电举升平台在电动汽车的宽度方向上运动。这种方式下,当换电举升平台承载有相对重量较轻的电动汽车时会浪费驱动资源,并且也无法保证在换电举升平台承载有相对重量较重的电动汽车的情况下,驱动装置一定能够提供足够的作用力以推动电动汽车进行轮距调节。
技术实现思路
1、本发明要解决的是现有技术中通过驱动装置对换电举升平台的轴距进行调整时,容易浪费驱动资源,且无法保证换电举升平台承载有相对重量较重的电动汽车的情况下,驱动装置一定能够提供足够的作用力以推动电动汽车进行轮距调节的技术问题,提供一种能够节约驱动资源,并且可以在换电举升平台承载有相对重量较重的电动汽车的情况下,驱动装置也能驱动换电举升平台对电动汽车进行轮距调节的换电车辆的轴距调节方法、系统、电子设备及存储介质。
2、本发明是通过下述技术方案来解决上述技术问题:
3、本发明提供了一种换电车辆的轮距调节方法,用于对位于举升装置上的换电车辆进行位置调整,包括如下步骤:
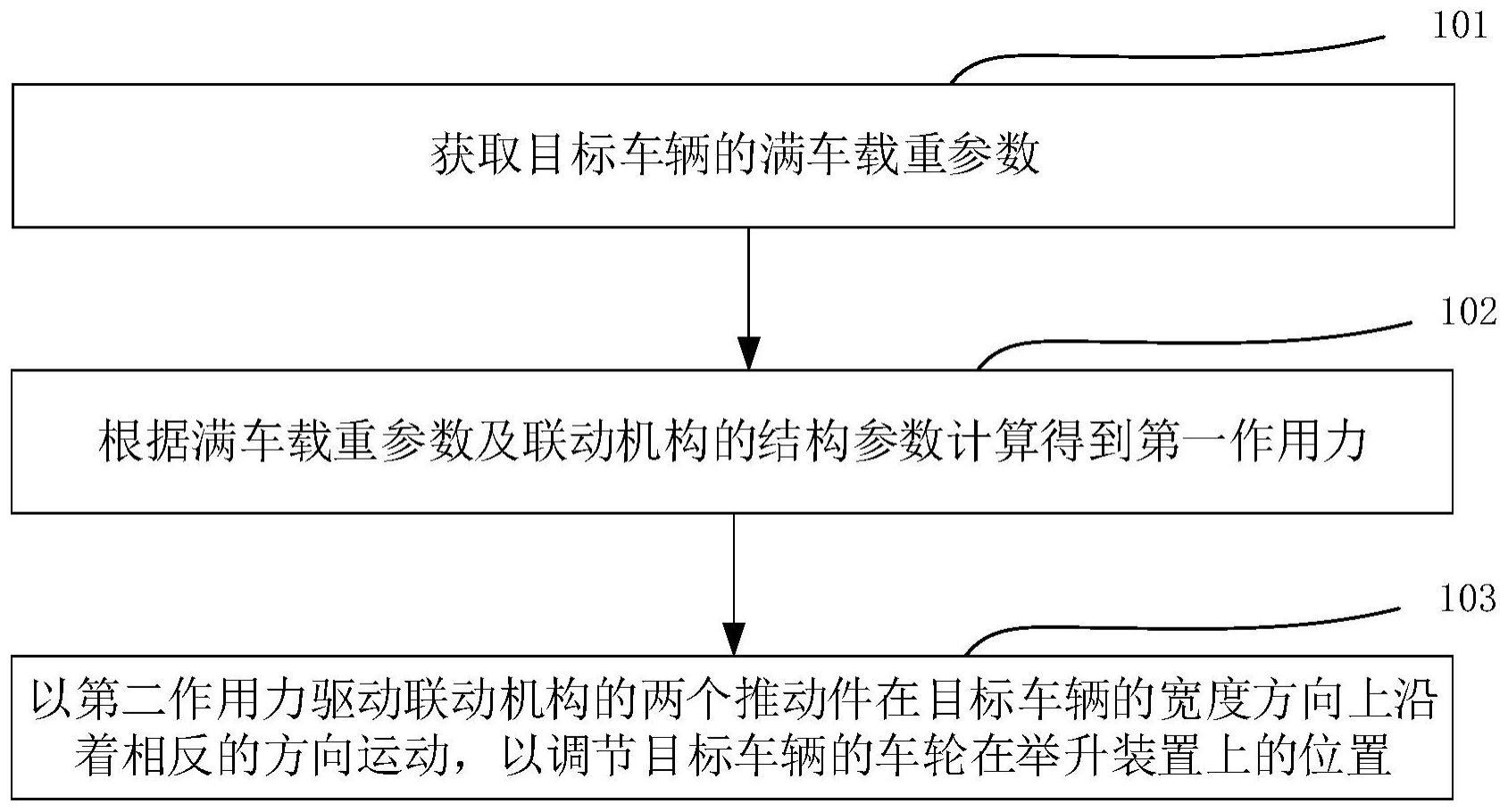
4、获取目标车辆的满车载重参数;
5、根据所述满车载重参数及联动机构的结构参数计算得到第一作用力;
6、以第二作用力驱动所述联动机构的两个推动件在所述目标车辆的宽度方向上沿着相反的方向运动,以调节所述目标车辆的车轮在举升装置上的位置,所述第二作用力不小于所述第一作用力。
7、本发明中,根据目标车辆的满车载重量可以计算得到能够从侧面推动对应的目标车辆的作用力的大小,具体方法为通过结合满车载重量参数与联动机构的结构参数计算得到同时推动目标车辆两侧的车轮的最小的第一作用力,通过驱动装置给联动机构提供超过最小的第一作用力的第二作用力,实现对每一辆目标车辆均可以采用相对最小的作用力,即可推动车轮在目标车辆的宽度方向上运动,以实现轮距的调节,提高驱动资源的利用度,节约换电成本。
8、较佳地,所述获取目标车辆的满车载重参数的步骤包括以下步骤:
9、获取目标车辆的车辆识别符;
10、根据所述车辆识别符获取所述目标车辆的满车载重参数。
11、本发明中,根据识别的车辆识别符自动匹配得到目标车辆对应的满车载重量的数值,一方面,提高了满车载重量获取的智能性,另一方面,车辆识别符与满车载重量一一对应,也不易出错。
12、较佳地,所述举升装置包括框架体,所述框架体上设有用于停放车轮的辊筒机构、所述联动机构及用于驱动所述联动机构的驱动装置,所述辊筒机构包括多个沿着所述目标车辆的宽度方向排布的辊筒组件,每个辊筒组件包括转动轴、轴承及辊筒,所述辊筒通过对应的轴承转动连接于所述转动轴;
13、所述联动机构包括第一连接板、第一连杆、旋转件、第二连杆、第二连接板及两个推动件,所述两个推动件分别为第一推动件与第二推动件,所述第一推动件、所述第一连接板、所述第一连杆、所述旋转件、所述第二连杆、所述第二连接板及所述第二推动件依次连接,所述第一连接板与所述第二连接板均通过相应位置处的线性导向机构与所述框架体沿着所述目标车辆的宽度方向滑动连接,所述第一连杆的第一端和所述第二连杆的第一端分别铰接于所述旋转件的两端,所述旋转件的中部具有旋转中心,所述旋转件的旋转中心与所述举升装置的框架体转动连接且所述旋转件可沿着其旋转中心转动,且所述第一推动件、所述第一连接板、所述第一连杆、所述旋转件、所述第二连杆、所述第二连接板及所述第二推动件相对于所述旋转件的旋转中心中心对称,所述第一连杆与所述第一连接板之间构成的锐角为第一夹角,所述驱动装置的驱动端与所述第一连接板连接;
14、所述第一推动件的第一端与所述第一连接板的中部固定连接,所述第一连杆远离所述旋转件的一端与所述第一连接板的中部铰接,所述第二推动件的第一端与第二连接板的中部固定连接,所述第二连杆远离所述旋转件的一端与所述第二连接板的中部铰接;
15、所述第一推动件的第二端通过与所述目标车辆的第一侧的车轮接触来带动所述第一侧的车轮在所述目标车辆的宽度方向运动,所述第二推动件的第二端通过与所述目标车辆第二侧的车轮接触来带动所述第二侧的车轮在所述目标车辆的宽度方向运动。
16、本发明中,采用上述结构,通过旋转件能够在只使用一个驱动装置的情况下,驱动第一推动件和第二推动件同步移动,不仅保证第一推动件和第二推动件移动的同步性,避免出现第一推动件和第二推动组件移动不同步的情况发生,提高了轮距调节精度,而且还保证了轮距调节机构的结构紧凑性,降低了成本。
17、较佳地,所述联动机构的结构参数包括最小夹角值,所述最小夹角值为所述联动机构处于收拢状态时,所述第一夹角的夹角值;
18、所述根据所述满车载重参数及联动机构的结构参数计算得到第一作用力包括如下步骤:
19、根据所述满车载重参数及所述辊筒组件的轴承的摩擦系数计算得到第一推力,所述第一推力为所述目标车辆被推动时所需的推力;
20、根据所述第一推力及所述最小夹角值计算得到第一作用力。
21、本发明中,根据满车载重参数及辊筒机构的轴承的摩擦系数计算可以得到目标车辆在满载时可以被推动的最小推力,即第一推力,根据第一推力与最小夹角值可以计算出经过联动机构的作用力传递到可以同时推动目标车辆两侧的最小推力,即第一作用力。本发明中,由于驱动装置作用于第一连接板上,由第一连接板传递到第二推动件上的力会发生损耗,因此,基于前述方式,可以计算出在发生力的损耗的情况下,仍然可以同时推动两个推动件的最小的第一作用力,避免推动第一推动件却无法推动第二推动件的情况发生。
22、较佳地,所述根据所述满车载重参数及所述辊筒组件的轴承的摩擦系数计算得到第一推力包括如下步骤:
23、通过第一公式计算第一推力f1;
24、所述第一公式为:
25、f1=w*μ*g
26、其中,w表示所述满车载重参数,μ表示所述轴承的摩擦系数,g表示重力加速度。
27、本发明中,由于目标车辆的车轮停放在辊筒机构上,具体停放在辊筒机构的辊筒上,在轮距调节的过程中,车轮在其自身的宽度方向上运动并带动辊筒沿着其自身的轴线运动,而辊筒通过对应的轴承转动连接于转动轴,因此,可以根据轴承的摩擦系数、满车载重系数及重力加速度计算得到车辆在满载时可以被推动的最小推力。
28、较佳地,所述根据所述第一推力及所述最小夹角值计算得到第一作用力包括如下步骤:
29、根据第二公式计算第一作用力f2;
30、所述第二公式为:
31、
32、其中,a表示所述最小夹角值。
33、本发明中,由于推力直接作用在第一连接板上,经由联动机构传递给第二连接板进而传递给第二推动件的推力会受到损耗,可以通过第二公式计算出目标车辆的两侧车轮都可以被推动时的最小作用力,以保证目标车辆的两侧均能被有效推动。
34、较佳地,所述以第二作用力驱动所述联动机构的两个推动件在所述目标车辆的宽度方向上沿着相反的方向运动的步骤前还包括如下步骤:
35、获取所述目标车辆的轮距参数;
36、根据所述轮距参数获取所述旋转件的第一目标转动值,当所述旋转件转动所述第一目标转动值时,所述目标车辆处于对中状态;
37、所述以第二作用力驱动所述联动机构的两个推动件在所述目标车辆的宽度方向上沿着相反的方向运动的步骤后还包括如下步骤:
38、在预设时间后,检测所述旋转件的第一转动值,当所述第一转动值大于或等于所述第一目标转动值时,确认轮距调节到位,控制所述两个推动件在所述目标车辆的宽度方向上保持当前位置。
39、本发明中,根据旋转件的旋转角度可以反应推动件推动目标车辆的运动距离。在进行轮距调节的过程中,根据获取的轮距参数可以得到对应的第一目标转动值,通过设置在旋转件下方的角度传感器则可以得到旋转件的第一转动值,根据第一目标转动值与第一转动值的大小比较可以判断轮距调节是否到位,保证目标车辆有效对中。如果在预设时间后检测到旋转件的第一转动值大于或等于第一目标转动值,则保持当前对中的位置,以使后续换电顺利进行。
40、较佳地,所述在预设时间后,检测所述旋转件的第一转动值的步骤前还包括如下步骤:
41、获取所述驱动装置的驱动参数;
42、根据所述驱动参数及所述第二作用力获取对应的预设时间。
43、本实施例中,可以预先获取驱动装置的驱动参数,根据驱动参数和第二作用力可以得到将对应的目标车辆推动到位的理论时间,并基于该理论时间得到预设时间,在预设时间后来检测轮距是否调节到位。
44、较佳地,检测所述旋转件的第一转动值的步骤后还包括如下步骤:
45、当所述第一转动值大于第二目标转动值时,生成错误调节信息和/或重新调节所述目标车辆的车轮在举升装置上的位置,所述第二目标转动值大于所述第一目标转动值。
46、本发明中,如果第一转动值大于第二目标转动值,则驱动两个驱动件移动的距离过大,可能损坏车轮,因此,在第一转动值大于第二目标转动值时,生成错误调节信息或者重新调节轮距可以起到保护车轮的作用。
47、较佳地,所述第二目标转动值等于所述第一目标转动值乘以预设系数,所述预设系数位于集合[1,1.01]内。
48、本发明中,将第二目标转动值设置为第一目标转动值除以预设系数,将预设系数设置为位于集合[1,1.01]内,可以防止两个驱动件移动的距离过大,损坏车轮的情况发生。
49、较佳地,所述以第二作用力驱动所述联动机构的两个推动件在所述目标车辆的宽度方向上沿着相反的方向运动的步骤后还包括如下步骤:
50、获取所述目标车辆的目标压力差;
51、在预设时间后,分别获取所述两个推动件处的第三推力与第四推力;
52、根据所述第三推力与所述第四推力获取所述两个推动件对两侧的车轮的压力差;
53、当所述压力差大于或等于所述目标压力差时,控制所述两个推动件在所述目标车辆的宽度方向上保持当前位置。
54、本发明中,通过检测第三推力施加的压力值以及第四推力施加的压力值可以计算得到两个推动件对两侧的车轮的压力差,通过压力差可以判断换电车辆的车轮位置是否调整到位。
55、较佳地,所述以第二作用力驱动所述联动机构的两个推动件在所述目标车辆的宽度方向上沿着相反的方向运动的步骤前还包括:
56、控制驱动所述联动机构运动至初始位置,所述初始位置为所述联动机构处于所述收拢状态下的位置。
57、本发明中,由于换电工位在不同的时间可以供不同的车辆进行换电,不同的车辆可能对应不同的轴距调节的目标位置,因此,在对目标车辆进行轮距调节前先复位,将联动机构调整至处于收拢状态下的初始位置,可以控制调节的起点,便于后续的调节过程。
58、本发明还提供了一种换电车辆的轮距调节系统,用于举升装置,包括重量获取装置、第一作用力获取模块、控制装置及驱动装置;
59、所述重量获取装置用于获取目标车辆的满车载重参数;
60、所述第一作用力获取模块用于根据所述满车载重参数及联动机构的结构参数计算得到第一作用力;
61、所述控制装置用于控制所述驱动装置以第二作用力驱动联动机构的两个推动件在所述目标车辆的宽度方向上沿着相反的方向运动,以调节所述目标车辆的车轮在举升装置上的位置,所述第二作用力不小于所述第一作用力。
62、本发明中,第一作用力获取模块根据重量获取装置获取的目标车辆的满车载重量可以计算得到能够从侧面推动对应的目标车辆的作用力的大小,具体方法为通过结合满车载重量参数与联动机构的结构参数计算得到推动目标车辆车轮的最小的第一作用力,控制装置通过驱动装置给联动机构提供超过最小的第一作用力的第二作用力,实现对每一辆目标车辆均可以采用相对最小的作用力,即可推动车轮在目标车辆的宽度方向上运动,以实现轮距的调节,提高驱动资源的利用度,节约换电成本。
63、本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述换电车辆的轮距调节方法。
64、本发明还提供了一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述换电车辆的轮距调节方法。
65、本发明的积极进步效果在于:本发明根据目标车辆的满车载重量及联动机构的结构参数可以计算得到能够从侧面同时推动对应的目标车辆的两侧的车轮的最小的第一作用力,在只使用一个驱动装置的情况下,通过驱动装置给联动机构的第一连接板提供超过最小作用力的第二作用力,可以驱动第一推动件和第二推动件分别带动第一侧的车轮及第二侧的车轮同步移动。
66、具体而言,根据满车载重参数及设置在主框架上用于承载车轮的辊筒组件的轴承的摩擦系数计算得到第一推力,根据所述第一推力及最小夹角值计算得到第一作用力,可以有效计算出能够推动车轮在滚筒组件上沿着目标车辆宽度方向上运动的最小推力。
67、在推动车轮的过程中,可以通过检测旋转件的旋转角度可以确定轮距调节是否到位。进一步地可以预先获取驱动装置的驱动参数,根据驱动参数和第二作用力可以得到将对应的目标车辆推动到位的预设时间,在预设时间后来检测轮距是否调节到位,并且在检测到轮距调节到位时,控制两个推动件在目标车辆的宽度方向上保持当前位置,从而在节约换电成本的情况下,保证车轮在目标车辆的宽度方向上被推动,并且可以精确控制推动的距离使轮距调节到位,以便后续换电顺利进行。
- 还没有人留言评论。精彩留言会获得点赞!