一洞双机上下游双调压室水电站水力振动分析方法
1.本发明属于水电站水力振动相关技术领域,更具体地,涉及一洞双机上下游双调压室水电站水力振动分析方法。
背景技术:
2.水力振动是有压输水系统中不同于调压室水位波动及水锤的另一类非恒定流现象,它是系统中可压缩水体所发生的流量变幅较小、压力变幅较大、频率较高的周期性振荡。水力共振可分为强迫振动引起的水力共振与自激共振两类。对于具有长引水/尾水管道的水电站,上、下游双调压室的布置方式是一种特殊的组合布置方式,从水力暂态过程的角度来看,设上下游双调压室水电站的暂态过程是非常复杂的,水力耦合振动问题突出。一洞双机共用管道产生的水力耦合使同一水力单元的两台机组相互影响,引入了各种复杂的叠加工况。鉴于此,建立设上下游双调压室一洞双机式水电站的数学模型来研究各种不同工况下水轮机调节系统的水力耦合振动特性尤为重要。
3.许多学者在上下游双调压室稳定性分析及一洞双机多工况分析领域做出了大量开拓性的工作。suo等推导了设上下游双调压室水电站的线性微分方程研究了小扰动下水电站的稳定性;chen等研究了不同调速器模式下设上下游双调压室水电站的稳定性。liu等研究了一洞双机布置型式的电站相继甩负荷机组流量变化对先甩机组的不利影响;li等对具有上游调压室、一洞双机布置的复杂引水管路系统进行了机组甩负荷过渡过程计算,确定了合理的导叶关闭规律。总的来说,前人对于带调压室水电站的研究主要集中于布置较为简单、单管单机的水电站运行稳定性以及调节品质的研究,对于一洞双机布置各工况下水力干扰导致的水力振动等问题研究较少。特别地,设上下游双调压室水力耦合对水轮机调节系统的振动特性的影响更为复杂,目前仍缺乏此方面的研究。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供了一洞双机上下游双调压室水电站水力振动分析方法,其目的在于具有针对性地研究上下游调压室面积变化以及对于一洞双机复杂引水管路系统引起的复杂水力耦合振动问题,为保证电站安全及稳定高效运行提供依据。
5.为实现上述目的,按照本发明的一个方面,提供了一洞双机上下游双调压室水电站水力振动分析方法,该方法包括下列步骤:
6.s1将一洞双机上下游双调压室的水轮机调节系统m简化为单管单机上下游双调压室水轮机调节系统m1,建立该单管单机上下游双调压室水电站m1的数学模型,并构建其相应的状态方程;
7.s2利用所述状态方程求解所述水轮机调节系统m1关于上游调压室断面放大系数和下游调压室断面放大系数的稳定域,并以此获得所述水轮机调节系统m1产生水力共振的共振区;
8.s3根据水轮机调节系统m1的数学模型构建对水轮机调节系统m的总体传递矩阵,并以此获得总体传递矩阵对应的状态方程,求解该状态方程对应的各阶复频率;
9.s4根据步骤s3中获得的各阶复频率获得该各阶复频率对应的衰减因子σ,取各阶复频率中衰减因子中最大值σ
max
为零时对应的调速器参数k
p
和ki,并以此绘制不同负荷阶跃值对应的水轮机调节系统m关于调速器参数的稳定域图,根据该稳定域图绘制不同k
p
下对应的ki与衰减因子σ的关系图,以此实现水轮机调节系统m的水力振动特性分析。
10.进一步优选地,在步骤s1中,所述数学模型按照下列关系式进行:
11.(1)引水/尾水隧洞数学模型:
12.引水隧洞:
13.尾水隧洞:
14.(2)上、下游调压室数学模型:
15.上游:
16.下游:
17.(3)压力管道数学模型:
[0018][0019]
(4)水轮机数学模型:
[0020][0021]
(5)发电机数学模型:
[0022][0023]
(6)调速器数学模型:
[0024][0025]
其中,z1、z2分别为上、下游调压室水位的相对偏差值,q
h1
、q
h2
分别为引水隧洞和尾水隧洞流量的相对偏差值,q
p
为机组引用流量的相对偏差值,h
fh10
、h
fh20
分别为引水隧洞和尾水隧洞单位质量水体的能量损失,h
fp0
为压力管道单位质量水体的能量损失,t
wh1
、t
wh2
分别为引水隧洞和尾水隧洞水流惯性时间常数,t
wp
为压力管道水流惯性时间常数,t
f1
、t
f2
分别为上、下游调压室时间常数,h0为机组初始时刻的工作水头,t为时间,h为机组工作水头的相对偏差值,x为机组转速的相对偏差值,y为水轮机导叶开度的相对偏差值,m
t
为水轮机
力矩的相对偏差值,eh、e
x
、ey为水轮机力矩传递系数,e
qh
、e
qy
、e
qx
为水轮机流量传递系数,ta为水轮机组惯性时间常数,mg为外界负荷扰动的相对偏差值,eg为负荷自调节系数,k
p
为比例增益,ki为积分增益。
[0026]
进一步优选地,在步骤s1中,所述状态方程按照下列关系式进行:
[0027][0028]
进一步优选地,在步骤s2中,所述稳定域按照下列步骤获得:
[0029]
s21将水轮机调节系统m1的状态方程进行laplace变换,以此获得到7阶线性常系数齐次微分方程;
[0030]
s22然后利用routh-hurwitz稳定判据得到关于n1、n2的水轮机调节系统m1的稳定域。
[0031]
进一步优选地,在步骤s21中,所述7阶线性常系数齐次微分方程具体如下:
[0032][0033]
其中,a0=λ3f0、a1=λ2f0+λ3f1+λ6g0、a2=λ1f0+λ2f1+λ3f2+λ5g0+λ6g1、a3=λ1f1+λ2f2+λ3f3+λ4g0+λ5g1+λ6g2、a4=λ1f2+λ2f3+λ3f4+λ4g1+λ5g2+λ6g3、a5=λ1f3+λ2f4+λ3f5+λ4g2+λ5g3+λ6g4、a6=λ1f4+λ2f5+λ4g3+λ5g4、a7=λ1f5+λ4g4;λ1=(e
yeqh-e
heqy
)ki、λ2=eh(e
qx-e
qykp
)+e
qh
(e
ykp-e
x
)+e
geqh
、λ3=e
qh
ta、λ4=e
yki
、λ5=e
ykp
+e
g-e
x
、λ6=ta。
[0034]
f0=t
wh1
t
wh2
t
wp
t
f1
t
f2
[0035]
[0036][0037][0038][0039][0040]
g0=t
wh1
t
wh2
t
f1
t
f2
[0041][0042][0043][0044]
g4=1
[0045]
其中,a0~a7,λ0~λ5,f0~f5,g0~g4均为中间变量,没有实际的物理含义。
[0046]
进一步优选地,在步骤s22中,所述水轮机调节系统m1的稳定域按照下列进行:
[0047]
以n1、n2作为横、纵坐标的水轮机调节系统m1的稳定域:
[0048][0049]
其中:n1、n2分别为上、下游调压室断面放大系数,f1、f2分别为上、下游调压室面积,f
th1
、f
th2
分别为上、下游调压室单独运行时的托马稳定断面。
[0050]
进一步优选地,在步骤s2中,所述获得所述稳定域后,还需采用快速傅里叶变换(fft)进行频谱分析并结合波动叠加原理进行水力振动特性,快速傅里叶变换(fft):
[0051]
y=fft(x)
[0052]
其中,y为水力暂态过程中各变量z1、z2、x对应的振幅,x为各变量z1、z2、x对应的波动过程。
[0053]
进一步优选地,在步骤s3中,所述求解该状态方程对应的各阶复频率采用牛顿迭代法求解,具体如下:
[0054][0055]
其中,为根据计算得到的行列式的值,为第k次迭代后的复频率,当满足精度时退出迭代。
[0056]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具备下列有益效果:
[0057]
1.本发明提出了一种一洞双机上下游双调压室水电站调压室在不同面积组合下的水力振动特性分析方法,通过构建反映上下游双调压室水力耦合作用的数学模型,并将routh-hurwitz稳定分析及fft频谱分析应用于水力振动分析,由于引入了基于上下游调压室面积组合的共振域,使得对于分析上下游调压室不同面积组合下水力耦合振动特性更为清晰直观,为水电站调压室面积设计提供可靠依据;
[0058]
2.本发明提出了一种基于总体传递矩阵法一洞双机上下游双调压室水电站不同运行工况下水力振动分析方法,通过构建系统总体传递矩阵及状态方程,采用牛顿迭代法求解,并将复频率应用于不同工况下的水力振动特性分析,由于考虑了一洞双机共用管道在不同运行工况下产生的水力干扰,为水电站运行时工况选择及安全稳定运行提供科学的参考。
附图说明
[0059]
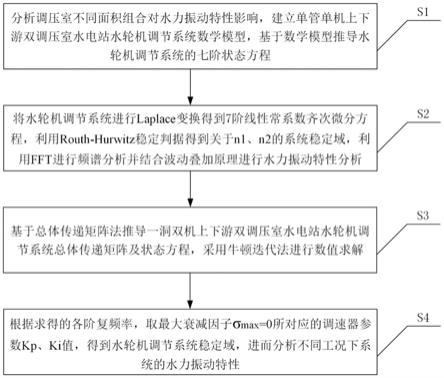
图1为本发明实施例提供的一洞双机上下游双调压室水电站水力振动分析方法流程图;
[0060]
图2为本发明实施例提供的一洞双机上下游双调压室水电站引水发电系统示意图;
[0061]
图3为本发明实施例中得到的水轮机调节系统稳定域;
[0062]
图4为本发明实施例中共振域内选取点,上、下游调压室面积组合为n1=2.5、n2=2.5对应水轮机调节系统的水力振动特性,(a)为z1、z2、x动态响应过程图,(b)为z1、z2、x相空间轨迹图,(c)为z1、z2、x动态响应频谱图;
[0063]
图5为本发明实施例中单机负荷扰动下的水力振动特性,(a)为负荷阶跃值对系统稳定域的影响,(b)为k
p
=2时第二阶衰减因子变化图,(c)为k
p
=5时第二阶衰减因子变化图;
[0064]
图6为本发明实施例中双机同减负荷扰动下的水力振动特性,(a)为负荷阶跃值对系统稳定域的影响,(b)为k
p
=1时第二阶衰减因子变化图,(c)为k
p
=2时第二阶衰减因子变化图;
[0065]
图7为本发明实施例中双机同增负荷扰动下的水力振动特性,(a)为负荷阶跃值对系统稳定域的影响,(b)为k
p
=1时第二阶衰减因子变化图,(c)为k
p
=6时第二阶衰减因子变化图;
[0066]
图8为本发明实施例中一台机组增负荷一台机组减负荷扰动下的水力振动特性,
(a)为负荷阶跃值对系统稳定域的影响,(b)为k
p
=2时第二阶衰减因子变化图,(c)为k
p
=6时第二阶衰减因子变化图。
具体实施方式
[0067]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0068]
本发明中提及的一洞双机上下游双调压室水电站水轮机系统,如图2所示,其中包括上游水库,上游调压室,水轮机组,下游调压室和下游水库,上游水库和上游调压室之间通过引水隧洞连接,下游调压室和下游水库之间通过尾水隧洞连接,水轮机组包括1号机组和2号机组,每个水轮机组包括水轮机、发电机和调速器,上游调压室和机组之间通过一进两出分岔管管连接,机组和下游调压室之间通过两进一出分岔管连接。
[0069]
一洞双机上下游双调压室水电站水力振动分析方法发热方法包括操作s1-操作s4,如图1所示,具体入下:
[0070]
操作s1:分析调压室不同面积组合对水力振动特性影响,建立单管单机上下游双调压室水电站水轮机调节系统数学模型,基于水轮机调节系统数学模型推导水轮机调节系统七阶状态方程。
[0071]
操作s2:将水轮机调节系统进行laplace变换得到7阶线性常系数齐次微分方程,利用routh-hurwitz稳定判据得到关于n1、n2的水轮机调节系统稳定域,利用快速傅里叶变换(fft)进行频谱分析并结合波动叠加原理进行水力振动特性。
[0072]
操作s3:基于总体传递矩阵法推导一洞双机上下游双调压室水电站水轮机调节系统总体传递矩阵及状态方程,采用牛顿迭代法进行数值求解。
[0073]
操作s4:根据求得的各阶复频率,取最大衰减因子σ
max
=0所对应的调速器参数k
p
、ki值,得到水轮机调节系统稳定域,进而分析不同工况下系统的水力振动特性。
[0074]
优选地,所述操作s1中,建立单管单机上下游双调压室水电站水轮机调节系统数学模型并推导水轮机调节系统七阶状态方程包含以下子步骤:
[0075]
1)单管单机上下游双调压室水电站水轮机调节系统数学模型
[0076]
(1)引水/尾水隧洞数学模型:
[0077]
引水隧洞:
[0078]
尾水隧洞:
[0079]
(2)上、下游调压室数学模型:
[0080]
上游:
[0081]
下游:
[0082]
(3)压力管道数学模型:
[0083][0084]
(4)水轮机数学模型:
[0085][0086]
(5)发电机数学模型:
[0087][0088]
(6)调速器数学模型:
[0089][0090]
其中,z1、z2分别为上、下游调压室水位的相对偏差值,q
h1
、q
h2
分别为引水隧洞和尾水隧洞流量的相对偏差值,q
p
为机组引用流量的相对偏差值,h
fh10
、h
fh20
分别为引水隧洞和尾水隧洞单位质量水体的能量损失,h
fp0
为压力管道单位质量水体的能量损失,t
wh1
、t
wh2
分别为引水隧洞和尾水隧洞水流惯性时间常数,t
wp
为压力管道水流惯性时间常数,t
f1
、t
f2
分别为上、下游调压室时间常数,h0为机组初始时刻的工作水头,t为时间,h为机组工作水头的相对偏差值,x为机组转速的相对偏差值,y为水轮机导叶开度的相对偏差值,m
t
为水轮机力矩的相对偏差值,eh、e
x
、ey为水轮机力矩传递系数,e
qh
、e
qy
、e
qx
为水轮机流量传递系数,ta为水轮机组惯性时间常数,mg为外界负荷扰动的相对偏差值,eg为负荷自调节系数,k
p
为比例增益,ki为积分增益。
[0091]
2)水轮机调节系统七阶状态方程
[0092][0093]
优选地,所述操作s2中,通过水轮机调节系统稳定域并利用频谱分析及波动叠加原理进行水力振动特性分析包含以下子步骤:
[0094]
1)进行laplace变换得到描述水轮机调节系统特性的7阶线性常系数齐次微分方程:
[0095][0096]
其中,a0=λf、a1=λ2f0+λ3f1+λ6g0、a2=λ1f0+λ2f1+λ3f2+λ5g0+λ6g1、a3=λ1f1+λ2f2+λ3f3+λ4g0+λ5g1+λ6g2、a4=λ1f2+λ2f3+λ3f4+λ4g1+λ5g2+λ6g3、a5=λ1f3+λ2f4+λ3f5+λ4g2+λ5g3+λ6g4、a6=λ1f4+λ2f5+λ4g3+λ5g4、a7=λ1f5+λ4g4;λ1=(e
yeqh-e
heqy
)ki、λ2=eh(e
qx-e
qykp
)+e
qh
(e
ykp-e
x
)+e
geqh
、λ3=e
qh
ta、λ4=e
yki
、λ5=e
ykp
+e
g-e
x
、λ6=ta。
[0097]
f0=t
wh1
t
wh2
t
wp
t
f1
t
f2
[0098][0099]
[0100][0101][0102][0103]
g0=t
wh1
t
wh2
t
f1
t
f2
[0104][0105][0106][0107]
g4=1
[0108]
2)利用routh-hurwitz稳定判据得到关于n1、n2的水轮机调节系统稳定域,以及快速傅里叶变换(fft)进行频谱分析过程如下:
[0109]
(1)利用routh-hurwitz稳定判据进行稳定性分析,分别以n1、n2作为横、纵坐标,可得到满足水轮机调节系统稳定条件的稳定域。n1、n2定义如下:
[0110][0111]
其中:n1、n2分别为上、下游调压室断面放大系数,f1、f2分别为上、下游调压室面积,f
th1
、f
th2
分别为上、下游调压室单独运行时的托马稳定断面。
[0112]
(2)利用快速傅里叶变换(fft)进行频谱分析,结合波动叠加原理进行区域划分得到共振域,分析共振域内水轮机调节系统水力振动特性。所采用的快速傅里叶变换(fft)如下:
[0113]
y=fft(x)
[0114]
其中,y为水力暂态过程中各变量z1、z2、x对应的振幅,x为各变量z1、z2、x对应的波动过程。
[0115]
优选地,所述操作s3中,基于总体传递矩阵法推导一洞双机上下游双调压室水电站水轮机调节系统总体传递矩阵及状态方程,并采用牛顿迭代法进行数值求解包含以下子步骤:
[0116]
1)建立水轮机调节系统总体传递矩阵的各模块传递矩阵为:
[0117]
(1)管道系统传递矩阵:
[0118][0119]
(2)水力边界传递矩阵:
[0120]
1.串联管:
[0121][0122]
2.上、下游水库:
[0123]
上游:
[0124]
下游:
[0125]
3.上、下游调压室:
[0126]
上游:
[0127]
下游:4.分岔管:
[0128]
一进两出:
[0129][0130]
两进一出:
[0131][0132]
5.水轮机组:
[0133]
1号机组:
[0134]
2号机组:
[0135]
其中,li为第i段管道的长度,ai、aj、ak分别为第i、j、k段管道的断面面积;g为重力加速度,a为管道内水体的水击波速,s为复频率或拉普拉斯变量,它是不依赖于位置和时间的复常数,s=σ+iω,σ为衰减因子,ω为圆频率;h
iu
、q
iu
、h
id
、q
id
、h
ju
、q
ju
、h
jd
、q
jd
、h
ku
、q
ku
、h
kd
、q
kd
分别为第i、j、k段管道首端及末端的复水头和复流量,分别为第i、j、k段管道首端及末端的复水头和复流量,别为第i、j、k段管道首断面及末断面的平均流量,ξi为水库端的局部水头损失系数,ξ
ij
为第i段管道和第j段管道连接处的局部水头损失系数;z
s1
、z
s2
分别为上、下游调压室的水力阻抗,z
t1
、z
t2
分别为1号机组和2号机组的水力阻抗。
[0136]
2)水轮机调节系统总体传递矩阵对应的状态方程为:
[0137][0138]
其中,总体传递矩阵[u(s)]由管道系统和边界条件两部分组成,包括:管道、上下游水库、串联管、两进一出和一进两出分岔管、上下游调压室、1号机组和2号机组,每段管道对应着首、末端复水头和复流量4个未知数,因此总体传递矩阵[u(s)]的大小为4n
×
4n;为状态向量,其大小为4n
×
1,矩阵[b]由水力振动类型决定,若为自由振动,则[b]=0,若为强迫振动,则[b]≠0
[0139]
3)牛顿迭代法进行数值求解为:
[0140][0141]
其中,为根据计算得到的行列式的值,为第k次迭代后的复频率,当满足精度时退出迭代,迭代精度ε取10-8
。
[0142]
首先合理估算s,即假定合理的衰减因子σ、频率间隔δω以及扫描次数n,计算sk=σ+k
·
δω
·
i,(k=1,2,3,
…
,n)时的|u(sk)|,找出极小值对应的复频率si(i=1,2,3,
…
,m)(m为频率扫描范围内的牛顿迭代初值的个数),即为牛顿迭代初值。(这里根据对各参数的初步分析,衰减因子σ取值范围为-0.01~0.01;频率间隔δω取0.01rad/s,δω精度过小可能会遗漏掉部分迭代初值,精度过大也会增加计算时间,降低迭代效率;扫描次数n由圆频率ω和频率间隔δω确定,根据扰动源频率ω取值范围为0~40rad/s,因此扫描次数n取4000)。
[0143]
优选地,所述操作s4中,研究不同运行工况对系统水力振动特性的影响分析方法为:
[0144]
不同运行工况分为单机负荷扰动和双机负荷扰动。单机负荷扰动mg分为单机增负荷扰动、单机减负荷扰动;双机负荷扰动m
g1
、m
g2
分为双机同增负荷扰动、双机同减负荷扰动、一台机组增负荷一台机组减负荷扰动。根据求得的各阶复频率s,取最大衰减因子σ
max
=0所对应的调速器参数k
p
、ki值,得到水轮机调节系统稳定域。由衰减因子σ随不同工况转换的变化情况分析系统的水力振动特性。
[0145]
下面将结合具体的实施例进一步说明本发明。
[0146]
以某一洞双机上下游双调压室水电站为例,对本发明方法进行详细说明。电站基本资料:机组额定出力306mw,额定水头195m,额定流量176.1m3/s,额定转速250r/min,机组加速时间常数ta=10.8s。双机额定工况运行时,1#机组水轮机传递系数为e
x
=-1.228,ey=0.498,eh=1.592,e
qx
=-0.184,e
qy
=0.634,e
qh
=0.578。其它参数取eg=0,b
p
=0.05,ty=0.02s。2#机组参数同1#机组参数,管道参数如表1所示。可求得上游调压室的托马稳定断面f
th1
=383m2,下游调压室的托马稳定断面f
th2
=274m2。上游调压室面积f1=500m2,下游调压室面积f2=400m2。上游调压室理论周期t
s1
=184s,下游调压室理论周期t
s2
=163s。
[0147]
表1管道参数
[0148][0149]
单独分析调压室不同面积组合对水力振动特性影响时,可将对称布置的一洞双机模型简化为单管单机模型,建立单管单机上下游双调压室水电站水轮机调节系统数学模型。将给出的电站参数代入,得到单管单机上下游双调压室水电站水轮机调节系统七阶状态方程,利用matlab调用ode45函数进行动态仿真分析,得到关于上、下游调压室水位z1、z2,水轮机组转速x的动态响应图谱。
[0150]
将水轮机调节系统各模块的数学模型进行laplace变换得到7阶线性常系数齐次微分方程,,如图3所示,利用routh-hurwitz稳定判据得到以调压室断面放大系数n1、n2为横、纵坐标的水轮机调节系统稳定域。在稳定域、不稳定域及分岔线上任意选择不同点,得到关于z1、z2、x的动态响应,对动态响应进行快速傅里叶变换(fft)频谱分析,得到相应的频谱图。根据频谱图上得到的基波及谐波的个数,通过波动叠加原理将水轮机调节系统稳定域划分得到共振域,分析共振域内水轮机调节系统水力振动特性。
[0151]
水轮机调节系统共振域如图4,在共振域内选取点(2.5,2.5)分析系统的水力振动特性如图5。(a)所示的z1、z2、x动态响应过程表明,x的动态响应的谐波快速衰减,振幅在经过几个周期之后便衰减为0,但基波为发散的振荡。因此,处于共振区内的任意面积组合对应的水轮机调节系统无法保持稳定。(a)和(c)所示的时域动态响应及相应的频谱图表明,上、下游调压室的水位波动频率都为0.0032hz,并且此时水轮机调节系统的转速响应频率也为0.0032hz。由此可知,当上、下游调压室的面积组合位于共振区内时,上、下游调压室的水位波动频率与水轮机调节系统的转速频率相同,此时整个系统产生水力共振。
[0152]
分析一洞双机上下游双调压室不同运行工况下水力振动特性。首先基于总体传递矩阵法推导一洞双机上下游双调压室水电站水轮机调节系统总体传递矩阵,得到系统总体传递矩阵对应的状态方程采用牛顿迭代法进行数值求解,得到系统各阶自振复频率,选取迭代精度ε为10-8
,衰减因子σ取值范围为-0.01~0.01,频率间隔δω取0.01rad/s,扫描次数n取4000。根据求得的各阶复频率s,取最大衰减因子σ
max
=0所对应的调速器参数k
p
、ki值,得到水轮机调节系统稳定域。取不同调速器参数值,分别分析衰减因子σ随不同工况转换的变化情况进而分析系统的水力振动特性。
[0153]
图5~图8所示分别为单机负荷扰动、双机同减负荷扰动、双机同增负荷扰动、一台机组增负荷一台机组减负荷扰动下的水轮机调节系统稳定域以及调速器参数k
p
、ki取不同值时衰减因子σ随不同工况转换的变化情况。由此可知,单机或双机正扰情况下的稳定性较负扰情况下的稳定性更好;对于负扰情况,增负荷会导致机组阻抗z
t
减小,且负荷阶跃值的绝对值|mg|越大,系统稳定性越差;对于正扰情况,增负荷会导致机组阻抗z
t
增大,且负荷阶跃值的绝对值|mg|越大,系统稳定性越好。
[0154]
单机增负荷运行时,当k
p
值较小,负荷阶跃值的变化不影响系统的稳定性。当电站负荷扰动阶跃总值一定时,双机运行较单机运行时负荷扰动对系统的影响,双机运行系统稳定性更好;当电站双机运行时,平均分配负荷阶跃值下系统的稳定性更好。对于一机增负
荷一机减负荷扰动工况,两台机组负荷阶跃值的绝对值变化相同时,绝对值越大,系统的稳定性越差;当k
p
值较小,一台机组负扰值相同,另一台机组为正扰且发生改变时,负荷阶跃值的变化不影响系统的稳定性;当k
p
值较大;负扰对系统稳定性的影响远大于正扰的影响,当负扰相同时,随着正扰负荷阶跃值的变化,两台机组负荷阶跃值的绝对值之和越大,系统的稳定性越好。
[0155]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1