获取全景图像的方法、装置、系统、设备及存储介质与流程
本技术涉及图像处理,特别涉及获取全景图像的方法、装置、系统、设备及存储介质。
背景技术:
1、在图像处理技术领域,针对目标对象在狭长空间场景中的全景图像的获取需求,由于观测深度分布广、单个图像采集设备的部署范围窄以及观测角度有限等原因,需要在该场景中布局多个图像采集设备,通过对多个图像采集设备采集的图像进行拼接,才能获取到目标对象在该场景中的完整全景图像。
2、相关技术中,以图像采集设备为相机为例,通过加速稳健特征(speeded uprobust features,surf)算法匹配相邻相机各自拍摄的图像中的特征点,然后通过特征点将待拼接图像变换到同一像素坐标系下,根据图像融合算法对位于相同坐标系下的不同图像的像素点进行像素融合,实现图像拼接,以得到全景图像。
3、但是,匹配图像中的特征点的过程依赖于特征点匹配的准确性,而针对狭长空间的场景,由于相邻相机的视差较大,导致特征点匹配的准确性较低,获取到的全景图像的准确度不高。
技术实现思路
1、本技术提供了一种获取全景图像的方法、装置、系统、设备及存储介质,用于通过标定物的方式获取包含目标对象的狭长空间场景中的全景图像。
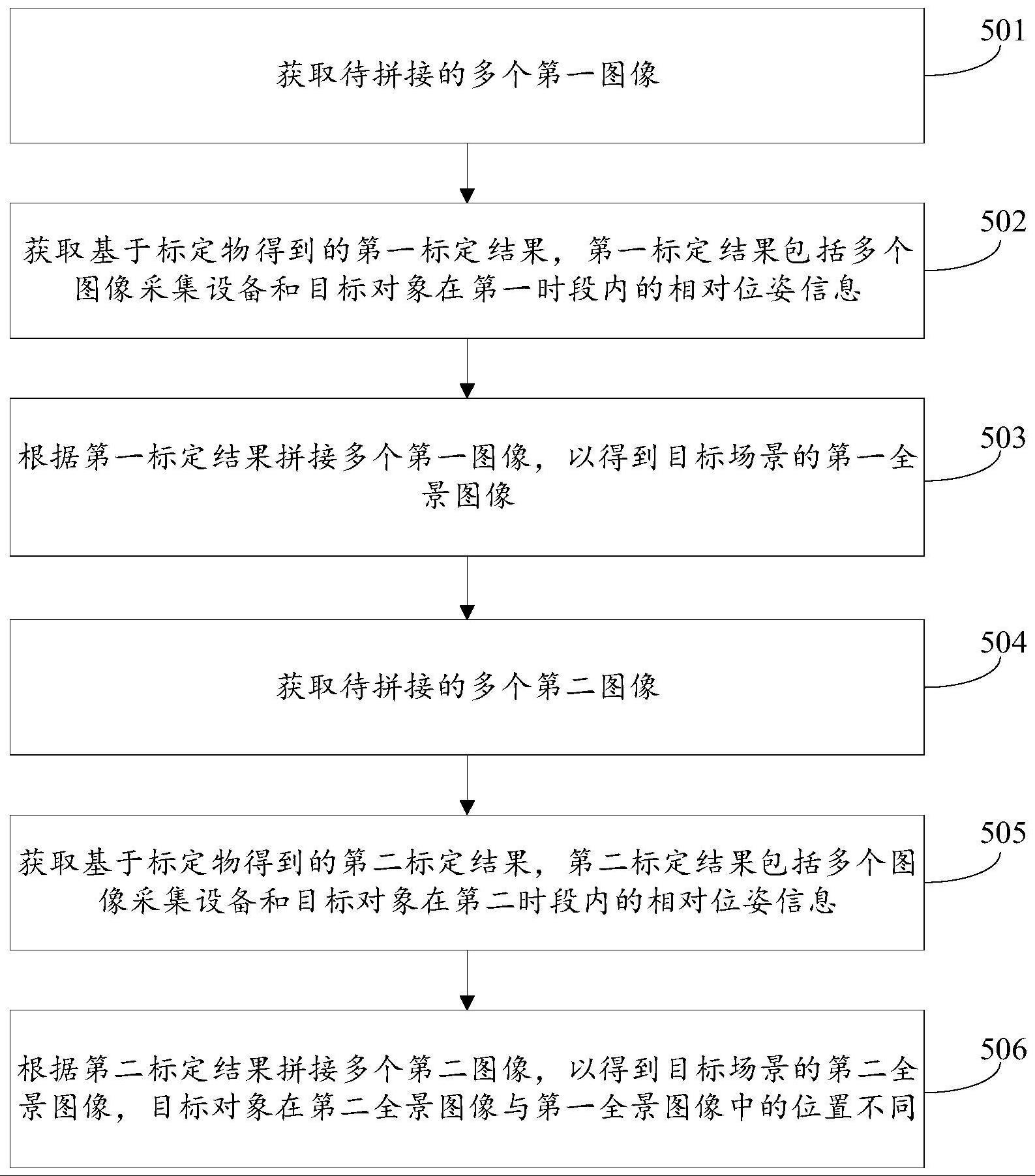
2、第一方面,提供了一种获取全景图像的方法,该方法包括:获取待拼接的多个第一图像,多个第一图像由多个图像采集设备在第一时段内对目标场景进行图像采集得到,一个第一图像对应一个图像采集设备,多个图像采集设备采集图像的视场范围不同,目标场景内包括目标对象,目标对象上靠近多个图像采集设备的一侧设有至少一个标定物;获取基于标定物得到的第一标定结果,第一标定结果包括多个图像采集设备和目标对象在第一时段内的相对位姿信息;根据第一标定结果拼接多个第一图像,以得到目标场景的第一全景图像;
3、获取待拼接的多个第二图像,多个第二图像由多个图像采集设备在第二时段内对目标场景进行图像采集得到,一个第二图像对应一个图像采集设备;获取基于标定物得到的第二标定结果,第二标定结果包括多个图像采集设备和目标对象在第二时段内的相对位姿信息;根据第二标定结果拼接多个第二图像,以得到目标场景的第二全景图像,目标对象在第二全景图像与在第一全景图像中的位置不同。目标对象在第二全景图像与在第一全景图像中的位置不同的本质是由于图像采集设备和目标对象的相对位置发生了变化,有可能是目标对象在世界坐标系的位置发生了变化,也可能是图像采集设备在世界坐标系的位置发生了变化。
4、其中,第一时段与第二时段为直接相邻的两个时段,可选地,第一时段与第二时段可以为图像采集设备的直接相邻图像采集周期,也可以为图像采集设备的采集直接相邻图像时的两个曝光时间段。换句话说,针对同一个图像采集设备,其采集的第一图像和第二图像是直接相邻帧。本领域普通技术人员可以理解,第一时段和第二时段也可以是间接相邻的两个时段,比如,第一时段为图像采集设备的第i个图像采集周期或曝光时段,第二时段为图像采集设备的第i+n个图像采集周期或曝光时段,i和n均为整数,n可以为1、2、3、4、5...等预先设定的阈值,当n=1的时候,即为前述直接相连的情况,当n大于1的时候,即为间接相邻,在这种情况下,针对同一个图像采集设备,其采集的第一图像和第二图像是间接相邻帧,即该图像采集设备在采集第一图像和第二图像之间还采集了其他帧。
5、通过基于目标对象上的标定物得到的标定结果来进行图像拼接,拼接过程不依赖图像中的特征点匹配,免受烟尘、光线等噪声对图像特征点产生的影响,使得获取的全景图像的稳定性更好,精确度更高。并且,在多个图像采集设备和目标对象的相对位置发生变化后,重新获取标定结果,使得获取的全景图像更加准确。此外,多个全景图像可以构成全景视频,通过本技术方案可以得到精确度更高的全景视频。
6、在一种可能的实施方式中,采集第二图像的多个图像采集设备与采集第一图像的多个图像采集设备相同。可选地,采集第二图像的多个图像采集设备与采集第一图像的多个图像采集设备不同,例如,目标场景中部署有5路图像采集设备,采集第一图像的图像采集设备为第1、2、3路图像采集设备,采集第二图像的图像采集设备为第2、3、4、5路图像采集设备。
7、在一种可能的实施方式中,目标对象为采煤机,目标场景为采煤工作面。通过本技术提供的方法获取采煤机在采煤工作面的全景图像,通过动态标定获取采煤机与图像采集设备的相对位姿信息,根据精确的相对位姿信息来拼接图像,拼接过程不依赖图像中的特征点匹配,不受采煤工作环境的烟尘影响,使得采煤机在全景图像上的拼接效果准确且稳定。
8、在一种可能的实施方式中,多个第一图像中包括至少两个第三图像,每个第三图像包含目标对象;根据第一标定结果拼接多个第一图像,以得到目标场景的第一全景图像,包括:根据第一标定结果确定每个第三图像的前景区域,每个第三图像的前景区域包含目标对象;根据每个第三图像的前景区域拼接至少两个第三图像,以得到包含目标对象的拼接图像;基于包含目标对象的拼接图像,获取目标场景的第一全景图像。
9、通过确定出的第三图像的前景区域来拼接图像,保证了拼接得到的全景图像中的前景区域的内容的完整性,不会出现前景区域的内容缺失或重复。
10、在一种可能的实施方式中,根据第一标定结果确定每个第三图像的前景区域,包括:根据第一标定结果获取第三图像对应的投影变换关系,投影变换关系用于指示目标对象的三维模型的模型坐标系到第三图像的像素坐标系的投影关系;根据配置参数获取目标对象外轮廓上的多个边界点在三维模型上的坐标位置,配置参数包括目标对象的空间尺寸信息以及标定物的位置信息;基于投影变换关系,将三维模型上的坐标位置投影到第三图像对应的像素坐标系中,以得到投影结果;根据投影结果获取目标对象在第三图像中的分割掩模。可选的,投影变换关系可以以投影变换矩阵的形式体现。
11、借助目标对象的空间尺寸信息以及标定物的位置信息等配置参数,通过投影的方式根据第一标定结果获取目标对象在第三图像中的分割掩模,使得获取的分割掩模的精确性更高,进而能够根据分割掩模得到更为准确的前景区域。
12、在一种可能的实施方式中,根据每个第三图像的前景区域拼接至少两个第三图像,以得到包含目标对象的拼接图像,包括:将每个第三图像进行拼接,以得到第一拼接图像;将每个第三图像的前景区域进行拼接,以得到第二拼接图像;将第一拼接图像和第二拼接图像融合,以得到包含目标对象的拼接图像。在确定出第三图像的前景区域后,可采用不同的方式拼接得到包含目标对象的拼接图像,获取全景图像的灵活性更高。
13、在一种可能的实施方式中,将每个第三图像的前景区域进行拼接,以得到第二拼接图像,包括:对于相邻的任意两个第三图像,基于任意两个第三图像的前景区域以及第一标定结果,确定在目标对象的三维模型上的参考区域,在参考区域上确定前景拼接位置,任意两个第三图像中均包含参考区域;基于投影变换关系将前景拼接位置投影到任意两个第三图像中,以得到任意两个第三图像上的前景拼接线;按照前景拼接线拼接任意两个第三图像,以得到第二拼接图像。
14、通过在目标对象的三维模型上选择前景拼接位置,再将前景拼接位置投影到对应的第三图像中,以获取第三图像上的前景拼接线,按照每个第三图像上的前景拼接线进行拼接,实现了基于前景区域的图像拼接,保证了全景图像中的目标对象的完整性。
15、在一种可能的实施方式中,目标对象为在目标场景中运动的目标对象;在参考区域上确定前景拼接位置之后,还包括:获取目标对象的运动速度与拼接位置的移动速度的对应关系;基于对应关系,确定第二时段内的在三维模型上的前景拼接位置。
16、通过根据目标对象的运动速度与拼接位置的移动速度的对应关系来确定下一时段内的目标对象的三维模型上的前景拼接位置,提高了获取第二时段内的目标对象的三维模型上的前景拼接位置的效率,还能够保证拼接位置是平滑变化不出现突变的,进一步保证了拼接得到的全景图像的质量。
17、在一种可能的实施方式中,将每个第三图像进行拼接,以得到第一拼接图像,包括:对于相邻的任意两个第三图像,根据第一标定结果,确定任意两个第三图像对应的图像采集设备在目标场景中的重叠视场,在重叠视场内选择背景拼接位置;根据投影变换关系将背景拼接位置投影到任意两个第三图像中,以得到任意两个第三图像上的背景拼接线;按照背景拼接线拼接任意两个第三图像,以得到第一拼接图像。
18、通过在任意两个第三图像对应的图像采集设备在目标场景中的重叠视场内选择背景拼接位置,基于投影方式获取第一拼接图像,使得第一拼接图像的准确性更高。且基于目标对象所处的空间位置、目标对象在图像上的成像位置,可以自由、精确的切换特写镜头。
19、在一种可能的实施方式中,将第一拼接图像和第二拼接图像融合,以得到包含目标对象的拼接图像,包括:对齐第一拼接图像与第二拼接图像中的目标位置,以得到对齐后的第一拼接图像与对齐后的第二拼接图像;根据第一标定结果获取至少两个第三图像对应的目标对象的分割掩模;根据目标对象的分割掩模,将对齐后的第一拼接图像与对齐后的第二拼接图像融合,以得到包含目标对象的拼接图像。先将第一拼接图像与第二拼接图像中的目标位置进行对齐,再根据目标对象的分割掩模将对齐后的第一拼接图像与对齐后的第二拼接图像融合,使得到的包含目标对象的拼接图像的精确度更高。
20、在一种可能的实施方式中,根据每个第三图像的前景区域拼接至少两个第三图像,以得到包含目标对象的拼接图像,包括:当至少一个第三图像中包括遮挡物时,基于每个第三图像的前景区域将每个第三图像进行拼接,以得到包含目标对象的拼接图像。
21、根据是否包括遮挡物来选择不同的拼接方式,避免在图像融合过程中由遮挡物出现断裂或重复影响拼接图像的效果,提高了获取的全景图像的准确性。
22、在一种可能的实施方式中,目标对象为采煤机;根据配置参数获取目标对象外轮廓上的多个边界点在目标对象的三维模型上的坐标位置,包括:获取采煤机的摇臂的运行角度;根据运行角度以及配置信息,获取目标对象外轮廓上的多个边界点在目标对象的三维模型上的坐标位置。
23、根据采煤机的摇臂的运行角度能够实时更新目标对象的空间尺寸,使得获取的采煤机外轮廓上的多个边界点的空间坐标位置更准确,提升分割掩模的定位精度,进一步提高获取的全景图像的准确性。
24、在一种可能的实施方式中,以得到包含目标对象的拼接图像之后,还包括:在目标对象的水平中轴线上等间隔选取多个点,根据投影变换关系获取多个点在包含目标对象的拼接图像上对应的多个投影点;基于多个投影点间的间隔的水平比例,对包含目标对象的拼接图像进行缩放变换,以得到多个投影点间隔相等且包含目标对象的拼接图像。
25、通过将目标对象的水平中轴线上等间隔选取的多个点在包含目标对象的拼接图像上对应的多个投影点的不同间隔,基于多个投影点间的间隔的水平比例将包含目标对象的拼接图像进行缩放变换,实现正视图矫正,使得目标对象在拼接图像中的结构比例不会随着观测视角不断变化、影响观看效果。
26、在一种可能的实施方式中,基于包含目标对象的拼接图像,获取目标场景的第一全景图像,包括:对多个第一图像中未包含目标对象的第四图像进行拼接,以得到未包含目标对象的拼接图像;对未包含目标对象的拼接图像与包含目标对象的拼接图像进行拼接,以得到目标场景的第一全景图像。通过分别获取包含目标对象的拼接图像与未包含目标对象的拼接图像,并将二者拼接得到目标对象的第一全景图像,使得第一全景图像的准确更高,且提高了拼接效率。
27、在一种可能的实施方式中,根据第一标定结果拼接多个第一图像,以得到目标场景的第一全景图像,包括:对于相邻的任意两个第一图像,根据第一标定结果,确定任意两个第一图像对应的图像采集设备在目标场景中的重叠视场,在重叠视场内选择背景拼接位置;根据投影变换关系将背景拼接位置投影到任意两个第一图像中,以得到任意两个第一图像上的背景拼接线;按照背景拼接线拼接任意两个第一图像,以得到目标场景的第一全景图像。
28、通过在任意两个第一图像对应的图像采集设备在目标场景中的重叠视场内选择背景拼接位置,基于投影方式获取第一全景图像,使得第一全景图像的准确性更高。且基于目标对象所处的空间位置、目标对象在图像上的成像位置,可以自由、精确的切换特写镜头。
29、在一种可能的实施方式中,获取基于标定物得到的第一标定结果,包括:接收图像采集设备发送的第一标定结果,第一标定结果由图像采集设备基于第一图像中包含的标定物确定。
30、对于接收图像采集设备发送的第一标定结果的方式,能够减少图像拼接过程的计算量,进而减少由计算量导致的获取全景图像的延时,提高了获取全景图像的效率。
31、在一种可能的实施方式中,获取基于标定物得到的第一标定结果,包括:对多个第一图像中的标定物进行检测,根据检测结果确定包含目标对象的第三图像;对第三图像中的标定物进行位置标定,以得到第一标定结果。通过对第一图像中的标定物进行检测,基于检测结果对标定物的位置标定来获取第一标定结果,使得获取的标定结果更加准确。且通过标定物获取标定结果的方式避免了特征配准,免受烟尘和光线等外界环境的影响,使得获取全景图像的方法稳定性更好,精度更高。
32、在一种可能的实施方式中,对第三图像中的标定物进行位置标定,包括:检测第三图像中的角点,当检测到4个或以上的角点时,利用角点在图像中的像素坐标与已知的角点在目标对象中的空间坐标进行单应性变换方程的求解,根据求解结果得到采集第三图像的图像采集设备和目标对象在第一时段内的相对位姿信息。通过第三图像中的角点在图像中的像素坐标与已知的角点在目标对象中的空间坐标来进行位置定位,使得获取到的图像采集设备和目标对象的相对位姿信息准确性高。
33、在一种可能的实施方式中,目标对象为采煤机,图像采集设备部署于支架上;获取基于标定物得到的第一标定结果,包括:响应于支架发生运动,获取支架运动前的第一前溜量和第一支柱高度,以及支架运动后的第二前溜量和第二支柱高度;基于支架的第一前溜量、第一支柱高度、第二前溜量和第二支柱高度,更新图像采集设备的外参矩阵;基于更新后的外参矩阵以及多个第一图像中包含的标定物确定第一标定结果。
34、通过获取支架发生移动的外部传递信息,提升了支架移动后的第一标定结果的准确性,避免支架发生移动后标定不及时引起的图像拼接错误,进而能够提高获取的全景图像的稳定性。
35、在一种可能的实施方式中,至少一个标定物的类型为棋盘格、二维码或自定义图案,至少一个标定物通过金属板、塑料板、纸板、布料、玻璃、陶瓷、石英或者易于粘贴的印刷品、油漆印刷、颜料喷涂等方式设于目标对象上。
36、通过选择不同类型以及不同设置方式在目标对象上设置标定物,不仅使得标定物的设置更灵活,且增加了该方法的可推广性。
37、需要说明的是,上述根据第一标定结果拼接多个第一图像,以得到目标场景的第一全景图像的过程,与根据第二标定结果拼接多个第二图像,以得到目标场景的第二全景图像的原理相同,因而可参考获取第一全景图像的方式来获取第二全景图像,不再一一赘述。
38、第二方面,提供了一种获取全景图像的装置,该装置包括:
39、第一获取模块,用于获取待拼接的多个第一图像,多个第一图像由多个图像采集设备在第一时段内对目标场景进行图像采集得到,一个第一图像对应一个图像采集设备,多个图像采集设备采集图像的视场范围不同,目标场景内包括目标对象,目标对象上靠近多个图像采集设备的一侧设有至少一个标定物;
40、第二获取模块,用于获取基于标定物得到的第一标定结果,第一标定结果包括多个图像采集设备和目标对象在第一时段内的相对位姿信息;
41、拼接模块,用于根据第一标定结果拼接多个第一图像,以得到目标场景的第一全景图像;
42、第一获取模块,还用于获取待拼接的多个第二图像,多个第二图像由多个图像采集设备在第二时段内对目标场景进行图像采集得到,一个第二图像对应一个图像采集设备;
43、第二获取模块,还用于获取基于标定物得到的第二标定结果,第二标定结果包括多个图像采集设备和目标对象在第二时段内的相对位姿信息;
44、拼接模块,还用于根据第二标定结果拼接多个第二图像,以得到目标场景的第二全景图像,目标对象在第二全景图像与第一全景图像中的位置不同。
45、在一种可能的实施方式中,多个第一图像中包括至少两个第三图像,每个第三图像包含目标对象;拼接模块,用于根据第一标定结果确定每个第三图像的前景区域,每个第三图像的前景区域包含目标对象;根据每个第三图像的前景区域拼接至少两个第三图像,以得到包含目标对象的拼接图像;基于包含目标对象的拼接图像,获取目标场景的第一全景图像。
46、在一种可能的实施方式中,拼接模块,用于根据第一标定结果获取第三图像对应的投影变换关系,投影变换关系用于指示目标对象的三维模型的模型坐标系到第三图像的像素坐标系的投影关系;根据配置参数获取目标对象外轮廓上的多个边界点在目标对象的三维模型上的坐标位置,配置参数包括目标对象的空间尺寸信息以及标定物的位置信息;基于投影变换关系,将三维模型上的坐标位置投影到第三图像对应的像素坐标系中,以得到投影结果;根据投影结果获取目标对象在第三图像中的分割掩模;根据分割掩模确定第三图像的前景区域。
47、在一种可能的实施方式中,拼接模块,用于将每个第三图像进行拼接,以得到第一拼接图像;将每个第三图像的前景区域进行拼接,以得到第二拼接图像;将第一拼接图像和第二拼接图像融合,以得到包含目标对象的拼接图像。
48、在一种可能的实施方式中,拼接模块,用于对于相邻的任意两个第三图像,基于任意两个第三图像的前景区域以及第一标定结果,确定在目标对象的三维模型上的参考区域,在参考区域上确定前景拼接位置,任意两个第三图像中均包含参考区域;基于投影变换关系将前景拼接位置投影到任意两个第三图像中,以得到任意两个第三图像上的前景拼接线;按照前景拼接线拼接任意两个第三图像,以得到第二拼接图像。
49、在一种可能的实施方式中,目标对象为在目标场景中运动的目标对象;拼接模块,还用于获取目标对象的运动速度与拼接位置的移动速度的对应关系;基于对应关系,确定第二时段内的在目标对象的三维模型上的前景拼接位置。
50、在一种可能的实施方式中,拼接模块,用于对于相邻的任意两个第三图像,根据第一标定结果,确定任意两个第三图像对应的图像采集设备在目标场景中的重叠视场,在重叠视场内选择背景拼接位置;根据投影变换关系将背景拼接位置投影到任意两个第三图像中,以得到任意两个第三图像上的背景拼接线;按照背景拼接线拼接任意两个第三图像,以得到第一拼接图像。
51、在一种可能的实施方式中,拼接模块,用于对齐第一拼接图像与第二拼接图像中的目标位置,以得到对齐后的第一拼接图像与对齐后的第二拼接图像;根据第一标定结果获取至少两个第三图像对应的目标对象的分割掩模;根据目标对象的分割掩模,将对齐后的第一拼接图像与对齐后的第二拼接图像融合,以得到包含目标对象的拼接图像。
52、在一种可能的实施方式中,拼接模块,用于当至少一个第三图像中包括遮挡物时,基于每个第三图像的前景区域将每个第三图像进行拼接,以得到包含目标对象的拼接图像。
53、在一种可能的实施方式中,目标对象为采煤机;拼接模块,用于获取采煤机的摇臂的运行角度;根据运行角度以及配置参数,获取目标对象外轮廓上的多个边界点在目标对象的三维模型上的坐标位置。
54、在一种可能的实施方式中,拼接模块,还用于在目标对象的水平中轴线上等间隔选取多个点,根据投影变换关系获取多个点在包含目标对象的拼接图像上对应的多个投影点;基于多个投影点间的间隔的水平比例,对包含目标对象的拼接图像进行缩放变换,以得到多个投影点间隔相等且包含目标对象的拼接图像。
55、在一种可能的实施方式中,拼接模块,用于对多个第一图像中未包含目标对象的第四图像进行拼接,以得到未包含目标对象的拼接图像;对未包含目标对象的拼接图像与包含目标对象的拼接图像进行拼接,以得到目标场景的第一全景图像。
56、在一种可能的实施方式中,拼接模块,用于对于相邻的任意两个第一图像,根据第一标定结果,确定任意两个第一图像对应的图像采集设备在目标场景中的重叠视场,在重叠视场内选择背景拼接位置;根据投影变换关系将背景拼接位置投影到任意两个第一图像中,以得到任意两个第一图像上的背景拼接线;按照背景拼接线拼接任意两个第一图像,以得到目标场景的第一全景图像。
57、在一种可能的实施方式中,第二获取模块,用于接收图像采集设备发送的第一标定结果,第一标定结果由图像采集设备基于第一图像中包含的标定物确定。
58、在一种可能的实施方式中,第二获取模块,用于对多个第一图像中的标定物进行检测,根据检测结果确定包含目标对象的第三图像;对第三图像中的标定物进行位置标定,以得到第一标定结果。
59、在一种可能的实施方式中,第二获取模块,用于检测第三图像中的角点,当检测到4个或以上的角点时,利用角点在图像中的像素坐标与已知的角点在目标对象中的空间坐标进行单应性变换方程的求解,根据求解结果得到采集第三图像的图像采集设备和目标对象在第一时段内的相对位姿信息。
60、在一种可能的实施方式中,目标对象为采煤机,图像采集设备部署于支架上;第二获取模块,用于响应于支架发生运动,获取支架运动前的第一前溜量和第一支柱高度,以及支架运动后的第二前溜量和第二支柱高度;基于支架的第一前溜量、第一支柱高度、第二前溜量和第二支柱高度,更新图像采集设备的外参矩阵;基于更新后的外参矩阵以及多个第一图像中包含的标定物确定第一标定结果。
61、在一种可能的实施方式中,至少一个标定物的类型为棋盘格、二维码或自定义图案,至少一个标定物通过金属板、塑料板、纸板、布料、玻璃、陶瓷、石英或者易于粘贴的印刷品、油漆印刷、颜料喷涂等方式设于目标对象上。
62、在一种可能的实施方式中,目标对象为采煤机,目标场景为采煤工作面。
63、第三方面,提供了一种获取全景图像的系统,该系统包括图像拼接设备与至少两个图像采集设备;图像采集设备,用于对目标场景进行图像采集;图像拼接设备用于执行第一方面或第一方面的任意一种可能的实现方式中的方法对图像采集设备采集到的图像进行拼接,以得到全景图像。
64、可选地,该系统还包括图像显示设备;该图像显示设备用于显示图像拼接设备执行第一方面或第一方面的任意一种可能的实现方式中的方法得到的全景图像。
65、第四方面,提供了一种电子设备,该电子设备包括:处理器,所述处理器与存储器耦合,所述存储器中存储有至少一条程序指令或代码,所述至少一条程序指令或代码由所述处理器加载并执行,以使所述电子设备实现如第一方面或第一方面的任意一种可能的实现方式中所述的获取全景图像的方法。
66、可选地,所述处理器为一个或多个,所述存储器为一个或多个。
67、可选地,所述存储器可以与所述处理器集成在一起,或者所述存储器与处理器分离设置。
68、在具体实现过程中,存储器可以为非瞬时性(non-transitory)存储器,例如只读存储器(read only memory,rom),其可以与处理器集成在同一块芯片上,也可以分别设置在不同的芯片上,本技术对存储器的类型以及存储器与处理器的设置方式不做限定。
69、第五方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述指令由处理器加载并执行,以使计算机实现如上第一方面或第一方面的任意一种可能的实现方式中所述的获取全景图像的方法。
70、第六方面,提供了一种计算机程序(产品),所述计算机程序(产品)包括:计算机程序代码,当所述计算机程序代码被计算机运行时,使得所述计算机执行上述各方面中的方法。
71、第七方面,提供了一种芯片,包括处理器,用于从存储器中调用并运行所述存储器中存储的指令,使得安装有所述芯片的电子设备执行第一方面或第一方面的任意一种可能的实现方式中的获取全景图像的方法。
72、应当理解的是,本技术的第二/三/四/五/六/七方面技术方案及对应的可能的实施方式所取得的有益效果可以参见上述对第一方面及其对应的可能的实施方式的技术效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!