特征点提取方法、装置、计算机设备和存储介质与流程
本技术涉及牙齿正畸,特别是涉及一种特征点提取方法、装置、计算机设备和存储介质。
背景技术:
1、随着牙齿正畸的逐渐普及,数字化齿科技术也得到了迅速的发展。数字化齿科技术主要是通过计算机辅助设计技术,对数字化的牙齿模型进行处理,最终得到一系列的治疗方案。而牙齿特征点的选取,是数字化齿科系统中的重要一环。其中尖点尤甚,尖点的数量是牙齿模型对单牙进行自动分类(例如尖牙、磨牙等)的重要依据之一。同时,尖点的位置对牙齿模型中牙冠的自动分割、相关配准与牙弓曲线的确定也是重要的参考标记点。
2、相关技术中,牙齿模型的特征点自动选取方法对牙齿模型的要求较高,需要提前对牙齿模型进行精准度程度较高的分割,导致特征点提取效率较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够高效、精确且鲁棒性较高的特征点提取方法、装置、计算机设备和存储介质。
2、第一方面,本技术提供了一种特征点提取方法。所述方法包括:
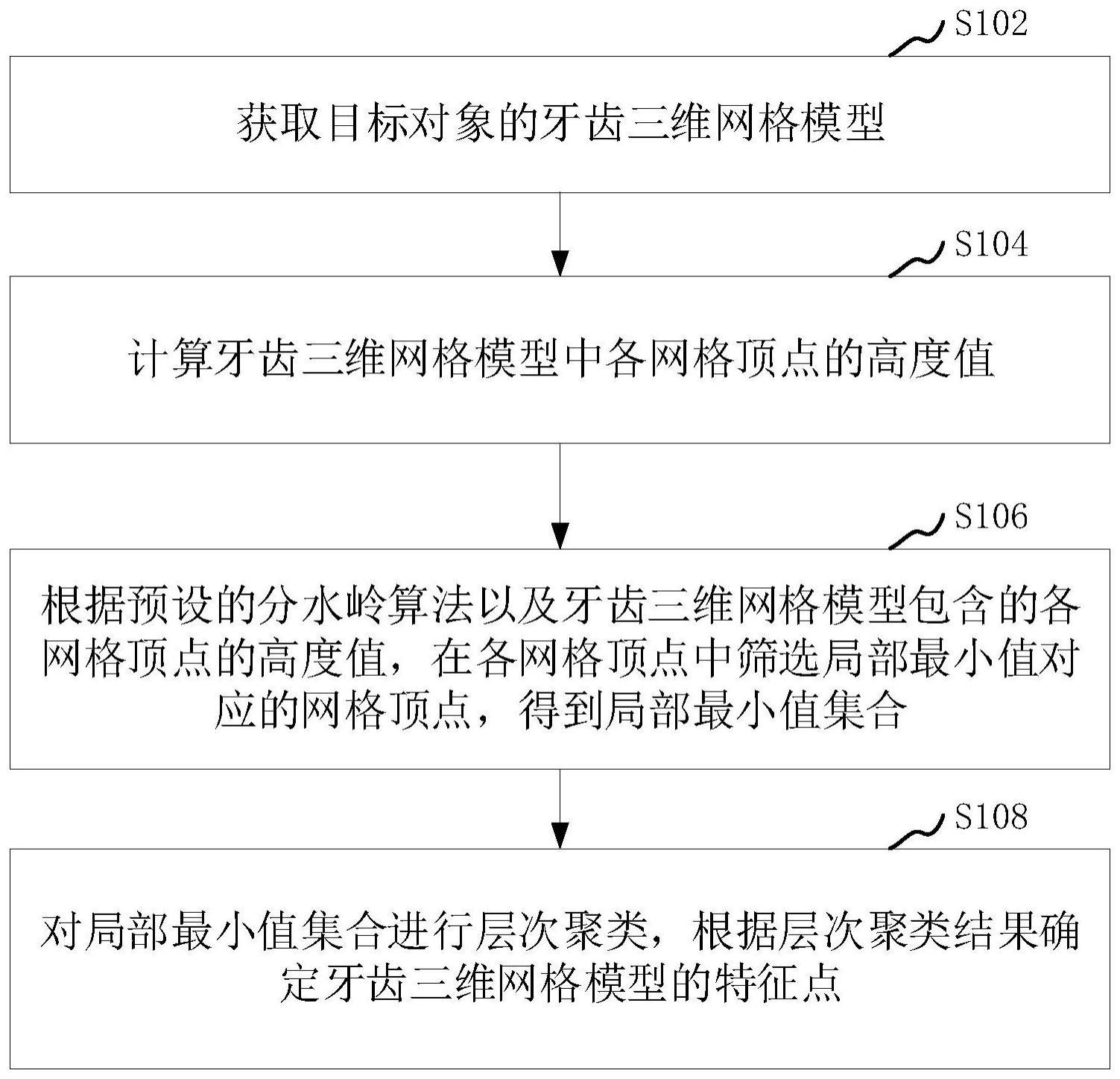
3、获取目标对象的牙齿三维网格模型,所述牙齿三维网格模型包括多个网格顶点;
4、计算所述牙齿三维网格模型中各网格顶点的高度值;
5、根据预设的分水岭算法以及所述牙齿三维网格模型包含的各网格顶点的高度值,在所述各网格顶点中筛选局部最小值对应的网格顶点,得到局部最小值集合;
6、对所述局部最小值集合进行层次聚类,根据层次聚类结果确定所述牙齿三维网格模型的特征点。
7、在其中一个实施例中,所述计算所述牙齿三维网格模型中各网格顶点的高度值,包括:
8、获取所述牙齿三维网格模型的各网格顶点在预设坐标系中的第一坐标轴高度值;
9、针对每个网格顶点,根据所述网格顶点的第一坐标轴高度值以及平均曲率,计算得到所述网格顶点的高度值。
10、在其中一个实施例中,所述根据所述网格顶点的第一坐标轴高度值以及平均曲率,计算得到所述网格顶点的高度值,包括:
11、对所述网格顶点的第一坐标轴高度值、所述第一坐标轴高度值对应的第一权重、平均曲率以及所述平均曲率对应的第二权重进行加权计算,得到所述网格顶点的高度值。
12、在其中一个实施例中,所述牙齿三维网格模型包括上牙颌的牙齿三维网格模型以及下牙颌的牙齿三维网格模型;
13、所述获取所述牙齿三维网格模型的各网格顶点在预设坐标系中的第一坐标轴高度值,包括:
14、在所述目标对象的牙齿三维网格模型是上牙颌的牙齿三维网格模型的情况下,将各网格顶点的第一坐标轴的坐标值作为第一坐标轴高度值;
15、在所述目标对象的牙齿三维网格模型是下牙颌的牙齿三维网格模型的情况下,将各网格顶点的第一坐标轴的坐标值的相反数,作为第一坐标轴高度值。
16、在其中一个实施例中,述根据预设的分水岭算法以及所述牙齿三维网格模型包含的各网格顶点的高度值,在所述各网格顶点中筛选局部最小值对应的网格顶点,得到局部最小值集合,包括:
17、判断所述牙齿三维网格模型中是否存在未被标记的网格顶点;
18、在所述牙齿三维网格模型中存在未被标记的网格顶点的情况下,在所述牙齿三维网格模型包含的未被标记的各个网格顶点中,筛选高度值最小的网格顶点,作为目标网格顶点;
19、如果所述目标网格顶点的一环邻接顶点均未被标记,则将所述目标网格顶点作为局部最小值,添加至局部最小值集合,并对所述目标网格顶点进行标记,所述目标网格顶点的一环邻接顶点与所述目标网格顶点有一条相连接的边;
20、如果所述目标网格顶点存在被标记的一环邻接顶点,则对所述目标网格顶点进行标记;执行所述“判断所述牙齿三维网格模型中是否存在未被标记的网格顶点”的步骤,直至所述牙齿三维网格模型中每个网格顶点均被标记,得到所述牙齿三维网格模型的局部最小值集合。
21、在其中一个实施例中,所述对所述局部最小值集合进行层次聚类,根据层次聚类结果确定所述牙齿三维网格模型的特征点,包括:
22、分别计算所述局部最小值集合中两两的网格顶点之间的测地线距离,得到测地线距离集合;
23、在所述测地线距离集合包含的多个测地线距离中,筛选测地线距离最小的测地线距离,作为目标测地线距离;
24、如果所述目标测地线距离小于预设层次聚类阈值,则将所述目标测地线距离对应的两个网格顶点中高度值较大的网格顶点,从所述局部最小值集合删除,执行所述根据预设第二筛选条件,对所述测地线距离集合中包含的多个测地线距离进行筛选,得到目标测地线距离的步骤,直至所述目标测地线距离大于或等于预设层次聚类阈值,将所述筛选后的局部最小值集合包含的各个网格顶点作为所述牙齿三维网格模型的特征点。
25、在其中一个实施例中,所述方法还包括:
26、将所述牙齿三维网格模型以及所述牙齿三维网格模型的多个特征点显示于预设显示界面。
27、第二方面,本技术还提供了一种特征点提取装置。所述装置包括:
28、牙齿三维网格模型获取模块,用于获取目标对象的牙齿三维网格模型,所述牙齿三维网格模型包括多个网格顶点;
29、计算模块,用于计算所述牙齿三维网格模型中各网格顶点的高度值;
30、筛选模块,用于根据预设的分水岭算法以及所述牙齿三维网格模型包含的各网格顶点的高度值,在所述各网格顶点中筛选局部最小值对应的网格顶点,得到局部最小值集合;
31、层次聚类模块,用于对所述局部最小值集合进行层次聚类,根据层次聚类结果确定所述牙齿三维网格模型的特征点。
32、在其中一个实施例中,所述计算模块包括:
33、第一获取单元,用于获取所述牙齿三维网格模型的各网格顶点在预设坐标系中的第一坐标轴高度值;
34、高度值计算单元,用于针对每个网格顶点,根据所述网格顶点的第一坐标轴高度值以及平均曲率,计算得到所述网格顶点的高度值。
35、在其中一个实施例中,所述高度值计算单元具体用于:
36、对所述网格顶点的第一坐标轴高度值、所述第一坐标轴高度值对应的第一权重、平均曲率以及所述平均曲率对应的第二权重进行加权计算,得到所述网格顶点的高度值。
37、在其中一个实施例中,所述牙齿三维网格模型包括上牙颌的牙齿三维网格模型以及下牙颌的牙齿三维网格模型;相应地,所述第一获取单元,包括:
38、第一坐标系高度值获取子单元,用于在所述目标对象的牙齿三维网格模型是上牙颌的牙齿三维网格模型的情况下,将各网格顶点的第一坐标轴的坐标值作为第一坐标轴高度值;
39、第二坐标系高度值获取子单元,用于在所述目标对象的牙齿三维网格模型是下牙颌的牙齿三维网格模型的情况下,将各网格顶点的第一坐标轴的坐标值的相反数,作为第一坐标轴高度值。
40、在其中一个实施例中,所述筛选模块,包括:
41、标记判断单元,用于判断所述牙齿三维网格模型中是否存在未被标记的网格顶点;
42、目标网格顶点确定单元,用于在所述牙齿三维网格模型中存在未被标记的网格顶点的情况下,在所述牙齿三维网格模型包含的未被标记的各个网格顶点中,筛选高度值最小的网格顶点,作为目标网格顶点;
43、添加单元,用于如果所述目标网格顶点的一环邻接顶点均未被标记,则将所述目标网格顶点作为局部最小值,添加至局部最小值集合,并对所述目标网格顶点进行标记,所述目标网格顶点的一环邻接顶点与所述目标网格顶点有一条相连接的边;
44、标记单元,用于如果所述目标网格顶点存在被标记的一环邻接顶点,则对所述目标网格顶点进行标记;执行所述“判断所述牙齿三维网格模型中是否存在未被标记的网格顶点”的步骤,直至所述牙齿三维网格模型中每个网格顶点均被标记,得到所述牙齿三维网格模型的局部最小值集合。
45、在其中一个实施例中,所述层次聚类模块包括:
46、测地线距离计算单元,用于分别计算所述局部最小值集合中每两个网格顶点之间的测地线距离,得到测地线距离集合;
47、目标测地线距离确定单元,用于在所述测地线距离集合包含的多个测地线距离中,筛选测地线距离最小的测地线距离,作为目标测地线距离;
48、特征点筛选单元,用于如果所述目标测地线距离小于预设层次聚类阈值,则将所述目标测地线距离对应的两个网格顶点中高度值较大的网格顶点,从所述局部最小值集合删除,执行所述根据预设第二筛选条件,对所述测地线距离集合中包含的多个测地线距离进行筛选,得到目标测地线距离的步骤,直至所述目标测地线距离大于或等于预设层次聚类阈值,将所述筛选后的局部最小值集合包含的各个网格顶点作为所述牙齿三维网格模型的特征点。
49、在其中一个实施例中,所述装置还包括:显示单元,用于将所述牙齿三维网格模型以及所述牙齿三维网格模型的多个特征点显示于预设显示界面。
50、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
51、获取目标对象的牙齿三维网格模型,所述牙齿三维网格模型包括多个网格顶点;
52、计算所述牙齿三维网格模型中各网格顶点的高度值;
53、根据预设的分水岭算法以及所述牙齿三维网格模型包含的各网格顶点的高度值,在所述各网格顶点中筛选局部最小值对应的网格顶点,得到局部最小值集合;
54、对所述局部最小值集合进行层次聚类,根据层次聚类结果确定所述牙齿三维网格模型的特征点。
55、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
56、获取目标对象的牙齿三维网格模型,所述牙齿三维网格模型包括多个网格顶点;
57、计算所述牙齿三维网格模型中各网格顶点的高度值;
58、根据预设的分水岭算法以及所述牙齿三维网格模型包含的各网格顶点的高度值,在所述各网格顶点中筛选局部最小值对应的网格顶点,得到局部最小值集合;
59、对所述局部最小值集合进行层次聚类,根据层次聚类结果确定所述牙齿三维网格模型的特征点。
60、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
61、获取目标对象的牙齿三维网格模型,所述牙齿三维网格模型包括多个网格顶点;
62、计算所述牙齿三维网格模型中各网格顶点的高度值;
63、根据预设的分水岭算法以及所述牙齿三维网格模型包含的各网格顶点的高度值,在所述各网格顶点中筛选局部最小值对应的网格顶点,得到局部最小值集合;
64、对所述局部最小值集合进行层次聚类,根据层次聚类结果确定所述牙齿三维网格模型的特征点。
65、上述特征点提取方法、装置、计算机设备和存储介质,其提取方法包括:获取目标对象的包括多个网格顶点的牙齿三维网格模型,并计算牙齿三维网格模型中各网格顶点的高度值;根据预设的分水岭算法以及牙齿三维网格模型包含的各网格顶点的高度值,在各网格顶点中筛选局部最小值对应的网格顶点,得到局部最小值集合;对局部最小值集合进行层次聚类,根据层次聚类结果确定牙齿三维网格模型的特征点。通过对牙齿三维网格模型中的各个网格顶点进行局部最小值的筛选,以及根据聚类结果进行二次筛选,可以在不需要对牙齿模型进行精准分割的情况下,实现对牙齿特征点的自动化提取,且提取精度较高,提取效率较高,对牙齿模型的鲁棒性更佳,对不同患者的多种牙齿形状均具备较好的特征点识别效果。
- 还没有人留言评论。精彩留言会获得点赞!