一种仰卧起坐的运动数据的确定方法及设备与流程
1.本技术涉及计算机技术领域,尤其涉及一种仰卧起坐的运动数据的确定方法及设备。
背景技术:
2.随着全民健身意识的加强,不管是公园广场还是露天场地,甚至是健身房的覆盖率也直线上升。在日常锻炼中,仰卧起坐是家喻户晓的运动之一,既可以有效锻炼腹部肌肉,并且动作简单,成为人们提高日常锻炼中最常做的一项运动。但在现有技术中,鉴别仰卧起坐是否标准和计数仍然为原始的人工鉴别和人工计数,这样使得鉴别和计数的过程不但耗费人力,而且非常不方便;同时,现有技术中,用于测量仰卧起坐的仪器,虽然脱离了人工检测和计数,由于机器的统一生产,仰卧起坐的仪器无法适合所用使用者,并且仰卧起坐仪器在搬运中也带来了很大的不便。
技术实现要素:
3.本技术的一个目的是提供一种仰卧起坐的运动数据的确定方法及设备,实现对用户仰卧起坐的运动数据进行智能化采集,从而更方便快捷。
4.根据本技术的一个方面,提供了一种仰卧起坐的运动数据的确定方法,其中,所述方法包括:
5.获取用户当前次仰卧起坐的加速度曲线;
6.对所述加速度曲线依序进行高频去噪和二重积分处理,得到所述用户当前次仰卧起坐的实时位移;
7.基于所述实时位移,判断所述用户当前次仰卧起坐是否有效,
8.若是,则获取所述用户当前次仰卧起坐的角速度曲线和对地角度;
9.基于所述用户当前次仰卧起坐的所述实时位移、所述角速度曲线和所述对地角度,确定所述用户当前次仰卧起坐的运动数据。
10.进一步地,上述方法中,所述获取用户当前次仰卧起坐的加速度曲线之前,所述方法还包括:
11.设置用于检测所述用户开始运动的最小加速度阈值;
12.其中,所述获取用户当前次仰卧起坐的加速度曲线,包括:
13.获取所述用户的实时三轴加速度;
14.若所述实时三轴加速度中存在任一单轴的加速度大于所述最小加速度阈值,则确定所述用户已开始当前次仰卧起坐的运动,并获取所述用户当前次仰卧起坐的加速度曲线。
15.进一步地,上述方法中,所述方法还包括:
16.确定用于对所述用户进行的每次仰卧起坐进行有效性验证的验证模型;
17.其中,所述基于所述实时位移,判断所述用户当前次仰卧起坐是否有效,包括:
18.将所述实时位移输入所述验证模型,判断所述用户当前次仰卧起坐是否有效。
19.进一步地,上述方法中,所述确定用于对所述用户进行的每次仰卧起坐进行有效性验证的验证模型,包括:
20.获取所述用户历史进行的预测次有效的仰卧起坐分别对应的历史位移;
21.基于所述预测次有效的仰卧起坐分别对应的历史位移,构建用于对所述用户进行的每次仰卧起坐进行有效性验证的验证模型。
22.进一步地,上述方法中,所述运动数据包括运动方向;
23.其中,所述基于所述用户当前次仰卧起坐的所述实时位移、所述角速度曲线和所述对地角度,确定所述用户当前次仰卧起坐的运动数据,包括:
24.基于所述用户当前次仰卧起坐的所述实时位移和所述角速度曲线,计算所述用户当前次仰卧起坐的空间轨迹;
25.基于所述用户当前次仰卧起坐的所述空间轨迹和所述对地角度,确定所述用户当前次仰卧起坐的运动方向。
26.进一步地,上述方法中,所述运动数据还包括:运动速度、运动频率及运动一致性结果中的一项或多项。
27.根据本技术的另一方面,还提供了一种非易失性存储介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行时,使所述处理器实现如上述一种仰卧起坐的运动数据的确定方法。
28.根据本技术的另一方面,还提供了一种仰卧起坐的运动数据的确定方法的设备,其中,该设备包括:
29.一个或多个处理器;
30.计算机可读介质,用于存储一个或多个计算机可读指令,
31.当所述一个或多个计算机可读指令被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上述一种仰卧起坐的运动数据的确定方法。
32.与现有技术相比,本技术通过获取用户当前次仰卧起坐的加速度曲线;对所述加速度曲线依序进行高频去噪和二重积分处理,得到所述用户当前次仰卧起坐的实时位移;基于所述实时位移,判断所述用户当前次仰卧起坐是否有效,若是,则获取所述用户当前次仰卧起坐的角速度曲线和对地角度;基于所述用户当前次仰卧起坐的所述实时位移、所述角速度曲线和所述对地角度,确定所述用户当前次仰卧起坐的运动数据,实现了对仰卧起坐进行鉴别和计数的智能化处理,使得用户在做仰卧起坐时就可以实现仰卧起坐姿势的鉴别和计数,方便快捷,在日常生活中可操作性更强,进而具有更好的应用前景。
附图说明
33.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
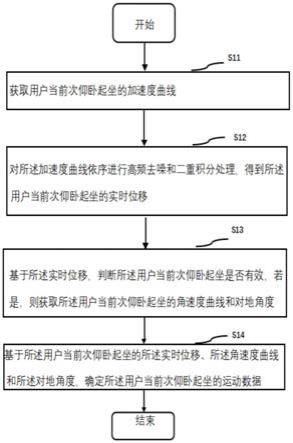
34.图1示出根据本技术的一种仰卧起坐的运动数据的确定方法的流程示意图;
35.图2示出根据本技术一个方面的一种仰卧起坐的运动数据的确定方法的实际流程示意图。
36.附图中相同或相似的附图标记代表相同或相似的部件。
具体实施方式
37.下面结合附图对本技术作进一步详细描述。
38.在本技术一个典型的配置中,终端、服务网络的设备和可信方均包括一个或多个处理器(cpu)、输入/输出接口、网络接口和内存。
39.内存可能包括计算机可读介质中的非永久性存储器,随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash ram)。内存是计算机可读介质的示例。
40.计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括非暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
41.如图1所示,本技术的一个方面提出了一种仰卧起坐的运动数据的确定方法的流程示意图,应用于用户的手持终端,该手持终端包括但不限于手持智能设备,比如可穿戴的手表、可放置在衣服兜里的手机及可穿戴的运动手环、脚环及腰环等可穿戴设备等,其中,所述方法包括步骤s11、步骤s12、步骤s13及步骤s14,具体包括如下步骤:
42.步骤s11,获取用户当前次仰卧起坐的加速度曲线。
43.步骤s12,对所述加速度曲线依序进行高频去噪和二重积分处理,得到所述用户当前次仰卧起坐的实时位移;其中,通过高频去噪可将最初加速度曲线中干扰信息排除,使得高频去噪后的加速度曲线能够更加精准的反映用户的运动情况,同时将高频去噪后的加速度曲线进行二重积分,实现了对复杂的仰卧起坐的加速度曲线的信息数字化转换,以便后续对仰卧起坐进行动作鉴别和计数。
44.步骤s13,基于所述实时位移,判断所述用户当前次仰卧起坐是否有效,若是,则获取所述用户当前次仰卧起坐的角速度曲线和对地角度。
45.需要说明的是,获取得到的用户当前次仰卧起坐的角速度曲线包括获取用户的实时三轴角速度,从而多角度反映用户运动的角速度变化情况,使得最终运动数据的结果更加能够真实反映用户运动情况。
46.例如,在本技术一优选实施例中,获取用户a当前次仰卧起坐的加速度曲线1,将加速度曲线1依序进行高频去噪和二重积分处理,得到用户a当前次仰卧起坐对应的实时位移,判断得到用户a当前次仰卧起坐有效,此时,获取用户a当前次三轴角速度曲线和对地角度,其中,三轴角速度曲线优选为x轴,y轴和z轴,并且x轴为用户a头部到脚部的方向,y轴为用户a左手臂方向,z轴为垂直于x轴和y轴,即垂直于地面的方向,即,获取得到x轴方向曲线,y轴方向曲线,z轴方向曲线和当前次用户a的对地角度。
47.步骤s14,基于所述用户当前次仰卧起坐的所述实时位移、所述角速度曲线和所述对地角度,确定所述用户当前次仰卧起坐的运动数据。
48.通过上述步骤s11至步骤s14,实现抽象化运动的量化表示,并且全程无需人工参
与,就可以达到智能化确定运动数据的目的,同时,用户可以根据环境的不同自己选择空旷的场地,独自完成仰卧起坐运动,本技术不受环境条件的限制,使用更加方便省事。
49.在本技术一优选实施例中,用户a做好仰卧起坐准备后,开始运动,此时,获取用户a当前次仰卧起坐的加速度曲线1,并将用户a当前次的加速度曲线1依序进行高频去噪和二重积分处理,得到用户a当前次仰卧起坐对应的实时位移米,经判断后,得到用户a当前次仰卧起坐的实时位移有效,即,用户a的当前次仰卧起坐有效,则获取用户a当前次三轴角速度曲线,优选为x轴角速度曲线,y轴角速度曲线和z轴角速度曲线,其中x轴为用户a头部到脚部的方向,y轴为用户a左手臂方向,z轴为垂直于x轴和y轴,即垂直于地面的方向,同时获取用户a当前次对地角度,根据用于a的实时位移,x轴角速度曲线,y轴角速度曲线,z轴角速度曲线和对地角度得到用户a的当前次仰卧起坐的运动数据,实现了结合实时位移、所述角速度曲线和所述对地角度,对仰卧起坐进行鉴别和计数的智能化处理,使得用户在做仰卧起坐时就可以实现仰卧起坐姿势的鉴别和计数,方便快捷,在日常生活中可操作性更强,进而具有更好的应用前景。
50.接着本技术上述实施例,其中,所述步骤s11之前,所述方法还包括:设置用于检测所述用户开始运动的最小加速度阈值;其中,所述步骤s11获取用户当前次仰卧起坐的加速度曲线,具体包括:获取所述用户的实时三轴加速度;若所述实时三轴加速度中存在任一单轴的加速度大于所述最小加速度阈值,则确定所述用户已开始当前次仰卧起坐的运动,并获取所述用户当前次仰卧起坐的加速度曲线。
51.例如,在用户a开始运动前,优选用户a的三轴加速度方向为x轴加速度方向、y轴加速度方向和z轴加速度方向,其中x轴为用户a头部到脚部的方向,y轴为用户a左手臂方向,z轴为垂直于x轴和y轴,即垂直于地面的方向,设置x轴加速度方向和y轴加速度方向的最小加速度阈值均为0米每平方秒、z轴加速度方向的最小加速度阈值为0.55米每平方秒;用户a开始运动后,得到用户a的三轴加速度大小为x轴加速度方向数值为0米每平方秒、y轴加速度方向数值为0.28米每平方秒和z轴加速度方向数值为0.88米每平方秒,其中,y轴加速度和z轴加速度都超出设置的y轴加速度的最小加速度阈值和z轴加速度的最小加速度阈值,即,判断得到用户a已经开始当前次仰卧起坐运动,及时获取用户a当前次仰卧起坐运动的加速度曲线,避免获取到多余且无效的加速度曲线,从而防止无效信息对后续加速度曲线分析的影响,实现了自动检测并判断仰卧起坐运动的开始,不受其他外在环境约束运动的开始。
52.接着本技术上述实施例,所述方法还包括:确定用于对所述用户进行的每次仰卧起坐进行有效性验证的验证模型;其中,所述基于所述实时位移,判断所述用户当前次仰卧起坐是否有效,包括:将所述实时位移输入所述验证模型,判断所述用户当前次仰卧起坐是否有效。在此,不同的用户对应的用于对用户进行的仰卧起坐进行有效性验证的验证模型不同,即一个用户对应一个验证模型,以满足对不同用户所做的仰卧起坐进行有效性验证的定向性分析和验证。
53.例如,在检测用户a进行仰卧起坐之前,需要先训练并确定用于对用户a进行的每次仰卧起坐进行有效性验证的验证模型model(a),然后,在用户a进行仰卧起坐的开始过程中,将获取并计算得到的用户a进行的当前次仰卧起坐的实时位移输入至所述用于对用户a进行的每次仰卧起坐进行有效性验证的验证模型model(a)中,进行判断用户a的当前次仰
卧起坐是否有效,实现了通过验证模型model(a)能够达到对用户a进行的当前次仰卧起坐进行有效性验证的目的。
54.接着本技术上述实施例,其中,所述确定用于对所述用户进行的每次仰卧起坐进行有效性验证的验证模型,具体包括:获取所述用户历史进行的预测次有效的仰卧起坐分别对应的历史位移;基于所述预测次有效的仰卧起坐分别对应的历史位移,构建用于对所述用户进行的每次仰卧起坐进行有效性验证的验证模型。
55.在此,历史位移是指当前次仰卧起坐之前的历史次仰卧起坐对应的实时位移,例如,用户当前次仰卧起坐为用户的第5个仰卧起坐,则第1个仰卧起坐至第4个仰卧起坐即为当前次仰卧起坐的历史次仰卧起坐,此时,第1个仰卧起坐至第4个仰卧起坐对应的实时位移为第5次仰卧起坐的历史位移。
56.例如,在确定用于对用户a进行的每次仰卧起坐进行有效性验证的验证模型model(a)时,先获取用户a历史进行的预设次(比如,n次,其中,n为大于等于1的正整数)有效的仰卧起坐分别对应的历史位移,比如,用户a历史进行的n次有效的仰卧起坐分别对应的历史位移为:历史位移s1、历史位移s2、历史位移s3、
……
、历史位移s(n-1)及历史位移s(n);然后,基于这n次有效的仰卧起坐分别对应的历史位移:历史位移s1、历史位移s2、历史位移s3、
……
、历史位移s(n-1)及历史位移s(n),构建用于对用户a进行的每次仰卧起坐进行有效性验证的验证模型model(a),结合用户a的历史位移,实现了对用户a进行仰卧起坐的有效性验证的验证模型model(a)的构建和确定,即根据用户a的历史位移,生成适用于用户a进行仰卧起坐有效性验证的验证模型model(a),克服了现有技术中无法向每个用户针对性的使用仅适用于该用户的验证模型的问题,实现了对每个用户的仰卧起坐进行有效性验证的个性化验证和定向化验证。
57.接着本技术上述实施例,其中,所述运动数据包括运动方向;其中,所述步骤s14基于所述用户当前次仰卧起坐的所述实时位移、所述角速度曲线和所述对地角度,确定所述用户当前次仰卧起坐的运动数据,具体包括:基于所述用户当前次仰卧起坐的所述实时位移和所述角速度曲线,计算所述用户当前次仰卧起坐的空间轨迹;基于所述用户当前次仰卧起坐的所述空间轨迹和所述对地角度,确定所述用户当前次仰卧起坐的运动方向。
58.需要说明的是,空间轨迹是由各轴每一时刻角速度和加速度值共同得到。并且,空间轨迹是重力场中的轨迹,通过地磁传感器得到对地角度的波形是磁力场中的轨迹,对比两者波形的特征,计算出映射关系,即为仰卧起坐的运动方向。
59.例如:用户a开始当前次仰卧起坐运动,通过加速度传感器获取用户a当前次仰卧起坐运动的加速度曲线1后,对加速度曲线1依序进行高频去噪和二重积分,得到用户a的当前次实时位移,此时,根据历史位移构建的验证模型,判断得到用户a当前次仰卧起坐为有效的,则通过陀螺仪获取用户a当前次仰卧起坐的角速度曲线,根据每一时刻角速度值和加速度值,得到用户c当前次仰卧起坐的空间轨迹,并通过地磁传感器获取用户c当前次仰卧起坐的对地角度,结合用户a当前次仰卧起坐的空间轨迹和对地角度,计算得到用户a当前次仰卧起坐的运动方向,突破了现有技术中只能对仰卧起坐进行计数的技术壁垒,结合加速度传感器、陀螺仪及地磁传感器采集的信息,更加精确地分析出用户a的每一次仰卧起坐的相关数据和运动方向,方便用户a对自身所做的仰卧起坐进行总结和改正,增强了用户a的体验度和使用感。
60.接着本技术上述实施例,其中,所述运动数据还包括:运动速度、运动频率及运动一致性结果中的一项或多项。
61.在此,通过计算不同有效动作的间隔时间,可以得到用户做仰卧起坐的运动速度;运动一致性结果通过对比每次运动的实时位移来得到用户运动一致或用户运动不一致的结果。
62.在本技术一优选实施例中,用户a开始进行一分钟仰卧起坐测试训练,获取用户a第一次仰卧起坐的加速度曲线,并将用户a第一次的加速度曲线依序进行高频去噪和二重积分处理,得到用户a第一次仰卧起坐的实时位移为0.8米,经判断后,得到用户a当前次仰卧起坐的实时位移为0.8米有效,即,用户a的一次仰卧起坐有效,获取用户a第一次三轴角速度曲线和对地角度为60度,得到用户a第一次仰卧起坐运动的运动数据;获取用户a第二次仰卧起坐的加速度曲线,并将用户a第二次的加速度曲线进行高频去噪和二重积分处理,得到用户a第二次仰卧起坐的实时位移为1米,经判断后,得到用户a第二次仰卧起坐的实时位移为1米有效,即,用户a的第二次仰卧起坐有效,获取用户a第二次三轴角速度曲线和对地角度为60度,得到用户a第二次仰卧起坐运动的运动数据;
……
;获取用户a最后一次仰卧起坐的加速度曲线,并将用户a最后一次的加速度曲线依序进行高频去噪和二重积分处理,得到用户a最后一次仰卧起坐的实时位移为0.2米,经判断后,得到用户a最后一次仰卧起坐的实时位移为0.2米无效,即,用户a的最后一次仰卧起坐无效,获取用户a最后一次三轴角速度曲线和对地角度为10度,得到用户a最后一次仰卧起坐运动的运动数据。
63.此时,用户a经过本技术技术完成一分钟仰卧起坐运动后,得到用户a一分钟内仰卧起坐次数为50个,其中有效仰卧起坐次数为45个,则用户a的运动速度为0.75个每秒,用户a的运动频率为1.3秒每个,分析用户a每个仰卧起坐的实时位移得到用户a运动结果一致,使得在用户整个运动过程中,不但可以分析每次仰卧起坐的运动数据,还可以综合分析整体仰卧起坐的运动结果,使用户深度了解自己每次仰卧起坐的完成情况,并根据运动数据进行自主优化。
64.如图2所示,为本技术一个方面的一种仰卧起坐的运动数据的确定方法的实际流程示意图,其中,用户佩戴具有加速度传感器,陀螺仪和地磁传感器的智能手表,其中,加速度传感器用于检测智能手表在用户做仰卧起坐的运动过程中的三轴加速度,形成加速度曲线;陀螺仪用于检测智能手表在用户做仰卧起坐的运动过程中的角度旋转程度,形成角速度曲线;地磁传感器用于检测智能手表在用户做仰卧起坐的运动过程中相对地面的角度,即对地角度。用户开始运动前,加速度传感器、陀螺仪、地磁传感器获取用户实时仰卧起坐运动的加速度曲线、角速度曲线、对地角度设置最小加速度阈值,并根据所述最小加速度阈值检测用户是否开始运动;若用户开始运动,则通过加速度传感器得到加速度曲线,通过滤波器,实现高频去噪;对高频去噪后的加速度波形进行二重积分,得出当前次运动的位移大小;以若干次历史位移大小作为模板,将用户的当前次位移大小与模板比较,判断当前次仰卧起坐是否有效;之后,在用户的当前次仰卧起坐有效的情况下,将高频去噪后的加速度曲线配合陀螺仪获取的角速度曲线,计算得出空间轨迹;调用地磁传感器得到的对地角度,利用空间轨迹和对地角度计算空间轨迹与地面参考系的关系,得出用户在当前次仰卧起坐的运动方向;再基于一连续时间段内所做的所有次仰卧起坐,计算出该连续时间段内的仰卧起坐的运动速度、运动频率及各动作一致性结果信息。
65.根据本技术的另一方面,还提供了一种非易失性存储介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行时,使所述处理器实现如上述一种仰卧起坐的运动数据的确定方法。
66.根据本技术的另一方面,还提供了一种仰卧起坐的运动数据的确定方法的设备,其中,该设备包括:
67.一个或多个处理器;
68.计算机可读介质,用于存储一个或多个计算机可读指令,
69.当所述一个或多个计算机可读指令被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上述设备的一种仰卧起坐的运动数据的确定方法。
70.在此,所述基于网关转发的代码数据访问的设备中的各实施例的详细内容,具体可参见上述一种仰卧起坐的运动数据的确定方法的实施例的对应部分,在此,不再赘述。
71.综上所述,本技术通过本技术通过获取用户当前次仰卧起坐的加速度曲线;对所述加速度曲线依序进行高频去噪和二重积分处理,得到所述用户当前次仰卧起坐的实时位移;基于所述实时位移,判断所述用户当前次仰卧起坐是否有效,若是,则获取所述用户当前次仰卧起坐的角速度曲线和对地角度;基于所述用户当前次仰卧起坐的所述实时位移、所述角速度曲线和所述对地角度,确定所述用户当前次仰卧起坐的运动数据,实现了对仰卧起坐进行鉴别和计数的智能化处理,使得用户在做仰卧起坐时就可以实现仰卧起坐姿势的鉴别和计数,方便快捷,在日常生活中可操作性更强,进而具有更好的应用前景。
72.需要注意的是,本技术可在软件和/或软件与硬件的组合体中被实施,例如,可采用专用集成电路(asic)、通用目的计算机或任何其他类似硬件设备来实现。在一个实施例中,本技术的软件程序可以通过处理器执行以实现上文所述步骤或功能。同样地,本技术的软件程序(包括相关的数据结构)可以被存储到计算机可读记录介质中,例如,ram存储器,磁或光驱动器或软磁盘及类似设备。另外,本技术的一些步骤或功能可采用硬件来实现,例如,作为与处理器配合从而执行各个步骤或功能的电路。
73.另外,本技术的一部分可被应用为计算机程序产品,例如计算机程序指令,当其被计算机执行时,通过该计算机的操作,可以调用或提供根据本技术的方法和/或技术方案。而调用本技术的方法的程序指令,可能被存储在固定的或可移动的记录介质中,和/或通过广播或其他信号承载媒体中的数据流而被传输,和/或被存储在根据所述程序指令运行的计算机设备的工作存储器中。在此,根据本技术的一个实施例包括一个装置,该装置包括用于存储计算机程序指令的存储器和用于执行程序指令的处理器,其中,当该计算机程序指令被该处理器执行时,触发该装置运行基于前述根据本技术的多个实施例的方法和/或技术方案。
74.对于本领域技术人员而言,显然本技术不限于上述示范性实施例的细节,而且在不背离本技术的精神或基本特征的情况下,能够以其他的具体形式实现本技术。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本技术的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本技术内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。装置权利要求中陈述的多个单元或装置也可以由一个单元或装置通过软件或者硬件来实现。第一,第二等词语用来表
示名称,而并不表示任何特定的顺序。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1