一种基于轮转操控策略麻雀优化的EfficientNet陶瓷碎片分类方法
一种基于轮转操控策略麻雀优化的efficientnet陶瓷碎片分类方法
技术领域
1.本发明属于图像处理技术领域,尤其涉及一种基于轮转操控策略麻雀优化的efficientnet陶瓷碎片分类方法。
背景技术:
2.目前,古陶瓷文物,历史悠久,承载着丰富的历史、文化和艺术内涵。近年来,随着人们物质生活的极大富足,精神文明生活不断丰富,致使古陶瓷文物研宄、鉴赏、收藏势头愈发高涨。但现在的市场上出现了一大批残破不堪的陶瓷碎片,文物修复问题迫在眉睫,如何高效率的修复这些数量庞大的碎片,使其拼接成完整的陶瓷文物,成为了新的研究课题,提高文物修复效率,减少陶瓷文物的缺失,具有重要的现实意义。
3.文物修复是一个非常庞大的工程,破碎陶瓷碎片的修复工作一般包括:碎片分类、碎片匹配和碎片拼接。碎片分类作为非常关键的核心环节之一,有效且准确的碎片分类效果可以有效的大幅降低后续修复工作的工程复杂度,提高匹配以及拼接的准确性,提高文物复原过程的整体效率。借助计算机辅助技术,可以更高效的对陶瓷碎片进行数字化修复,实现了手工作业到数字化、智能化的跨越。近年来,随着人工智能技术日益革新并大量应用于图像分类,如深度学习、机器学习、群体智能优化算法等在非线性映射能力和高精度函数逼近等方面表现出优越性能。但从目前已发表的研究成果分析,现有的一些图像分类模型大多是基于单一的网络模型,或几种网络模型相互结合使用,亦或是加入一些机制进行调节,而基于智能优化算法和网络模型结合的动态处理方式尚不多见。基于智能优化算法和网络模型结合的动态处理方式主要集中在:数据动态性和方法动态性。数据的动态性主要体现在在陶瓷碎片采集过程中,需要人为的去找到较好的拍摄角度,对于拍摄时的光线以及灯光的亮暗程度都需要动态的调整,此外陶瓷碎片的数据收集也是较为复杂的,在市场上的流动性,经转不同人手,特殊的操作等都使得获取的数据比较异构;方法的动态性针对陶瓷碎片破损的不同程度(角度、尺寸、清晰度),采用高性能智能计算处理,得到基于智能混合优化模型的陶瓷碎片分类方法,提高陶瓷碎片分类的高效性和鲁棒性。
4.针对陶瓷碎片数据的采集通常容易受到环境自身因素、设备因素等客观因素的影响,导致所采集到的样本数据中常常存在大规模、非线性、数据缺失、信息冗余度高、模糊、不确定、高噪声的问题,如何筛选清晰度较高以及颜色分明的碎片,这对后续碎片分类的准确率有着极大的影响。剔除随机属性因素,是陶瓷碎片分类的首要难题。
5.现有的图像分类网络模型从最初的lenet到alexnet、zfnet、vggnet、googlenet、resnet、senet以及densenet等经典的网络模型,它们都在图像分类、物体识别、图像分割等计算机视觉方面的应用领域都取得了革命性的创新成果,但是相对于近两年刚提出的efficientnet网络模型来说,它们在图像分类的效率及鲁棒性上表现欠佳,由于efficientnet综合考虑了网络在模型扩展时的因素:深度、宽度、分辨率,极大提高了网络的运行时间以及分类的准确率。
6.但是,在efficientnet网络模型中,理论上层数越多层级越深的网络越能抽取到滑坡诱发因素的数据本质特征,网络表达能力与泛化能力越强,与此同时也会造成网络结构愈加复杂,结构空间呈指数级增长,并产生过拟合现象和计算复杂度高的代价难题。
7.与此同时,群体智能优化算法作为计算智能理论与方法的重要研究内容之一。而麻雀算法(sparrow search algorithm,ssa)作为群体智能的一种新算法得到了众多学者的追捧。麻雀算法可以在没有集中控制并且缺少全局信息和模型的前提下,通过多特征融合与全局优化策略,为解决efficientnet网络结构、层级优化以及随着网络层级加深,抽取到的碎片信息模糊与冗余信息之间的自适应调整、降低误差积累提供新的解决思路与技术途径。但是,麻雀搜索算法和其他群体智能算法一样,当其接近全局最优时,依旧会出现种群多样性减少、搜索能力不足、易于陷入局部极值的现象,从而导致收敛速度较慢、求解精度较低的问题。因此,亟需设计一种新的陶瓷碎片分类方法及系统。
8.通过上述分析,现有技术存在的问题及缺陷为:
9.(1)现有的图像分类模型大多是基于单一的网络模型,或几种网络模型相互结合使用,或加入机制进行调节,而基于智能优化算法和网络模型结合的动态处理方式尚不多见;同时现有的图像分类网络模型在图像分类的效率及鲁棒性上表现欠佳。
10.(2)现有陶瓷碎片数据的采集通常容易受到环境自身因素、设备因素等客观因素的影响,导致所采集到的样本数据中常常存在大规模、非线性、数据缺失、信息冗余度高、模糊、不确定、高噪声的问题。
11.(3)在efficientnet网络模型中,理论上层数越多层级越深的网络越能抽取到滑坡诱发因素的数据本质特征,网络表达能力与泛化能力越强,与此同时也会造成网络结构愈加复杂,结构空间呈指数级增长,并产生过拟合现象和计算复杂度高的代价难题。
12.(4)麻雀搜索算法和其他群体智能算法一样,当其接近全局最优时,依旧会出现种群多样性减少、搜索能力不足、易于陷入局部极值的现象,从而导致收敛速度较慢、求解精度较低的问题。
13.解决以上问题及缺陷的难度为:
①
针对陶瓷碎片拍摄时存在光影问题以及清晰度较低、颜色模糊等客观问题,通过人为的数据预处理提高数据集的质量;其次引入efficientnet网络,通过该网络自身所具有的优势,进而实现基于efficientnet陶瓷碎片的分类,但由于efficientnet网络结构复杂,参数的最优设置是很棘手的一件事情;
②
efficientnet模型包含许多设置参数,如果参数设置不当,随着网络层级的加深,在训练过程中会产生大量的冗余数据,无法抽取到碎片的本质数据特征,致使分类效果表现欠佳;
③
麻雀算法可以对efficientnet网络模型进行优化,但由于efficientnet网络模型中数据训练的层级加深以及超参数设置需要大量试验取最优,使预测效果最佳,并且高复杂度模型参数过多预测速度则越慢,必然带来对高性能计算设备或服务器的需求。
14.解决以上问题及缺陷的意义为:将麻雀搜索算法(ssa)与efficientnet网络模型相结合,构建基于轮转操控策略的麻雀优化算法的陶瓷碎片分类。受采集数据时客观因素和人为因素的影响,建立基于efficientnet动态陶瓷碎片分类模型,有效提高分类的准确率;设计ssa模型对efficientnet模型中的超参数寻优,实现efficientnet网络中隐层神经单元数、学习率、批处理数、迭代次数四个超参数的自适应调整与协同计算;同时设计惯性权重因子和轮转操控策略开发全局最优解区域以及提升局部极值的逃逸能力,实现基于
efficientnet网络结构紧致性优化。该方法融合了具有复合扩展结构的efficientnet网络模型、基于halton序列和tent映射与轮转操控的麻雀优化算法,其中包含了随机迁徙机制、预警模拟机制和最佳适配机制,增强了网络输入与输出的紧致性,提升了陶瓷碎片的分类精度和泛化能力。本发明的技术开展及其预期研究成果可为其他文物或者图像分类提供有效的示范和指导作用,理论意义显著,应用价值突出。
技术实现要素:
15.针对现有技术存在的问题,本发明提供了一种基于轮转操控策略麻雀优化的efficientnet陶瓷碎片分类方法,尤其涉及一种基于轮转操控的麻雀优化算法的基于轮转操控策略麻雀优化的efficientnet陶瓷碎片分类方法。
16.本发明是这样实现的,一种陶瓷碎片分类方法,所述陶瓷碎片分类方法包括:
17.构建数据集,对数据集进行预处理后,按比例划分为训练集和测试集;初步构建efficientnet模型,确定预测模型的结构;设置麻雀搜索算法的参数值,用halton序列和tent映射初始化种群中麻雀个体位置,并计算种群中麻雀个体的适应度值;对麻雀个体按照适应度进行排序,选出最好的麻雀位置和最坏的麻雀位置,并更新种群中发现者、跟随者和预警者的位置;对种群中发现者加入惯性权重因子调节,利用随机迁徙机制改变侦察者位置,加入者的位置更新不变,根据个体变化前后的适应度判断是否更改个体位置;判断是否满足终止条件;若满足,则构建最终的efficientnet模型;若不满足,则返回适应度排序步骤。
18.进一步,所述陶瓷碎片分类方法包括以下步骤:
19.步骤一,建立efficientnet模型,通过对采集的实验室陶瓷碎片数据进行预处理,提取碎片数据特征,建立数据集,并将数据集划分为训练集和测试集;
20.步骤二,设计ssa模型对efficientnet模型中的超参数寻优,实现efficientnet网络中隐层神经单元数、学习率、批处理数和迭代次数四个超参数的协同计算与自适应调整;
21.步骤三,将ssa模型中的麻雀个体按照适应度大小进行排序,确定最好的麻雀位置和最坏的麻雀位置,并划分发现者和加入者种群;
22.步骤四,更新ssa模型中发现者、跟随者和预警者的位置,发现者为整个麻雀种群寻找食物并为所有跟随者提供觅食的方向;跟随者根据发现者的位置获取食物;更新种群中预警者的位置,当意识到危险时,群体边缘的麻雀会迅速向安全区域移动,以获得更好的位置;
23.步骤五,对ssa模型进行改进;根据个体扰动前后的适应度判断是否更改麻雀个体的位置,若没有得到期望最优值,则直接执行步骤六;
24.步骤六,判断ssa模型是否达到最大迭代次数;若满足,则结合算法搜索的最佳超参数值构建最终的efficientnet预测模型;用训练数据迭代训练该模型,将训练好的迭代模型通过测试数据得到预测数据;若不满足终止条件,则返回步骤五。
25.进一步,所述步骤一中的数据集按8:2比例划分为训练集和测试集;其中,所述数据集是以可视化所采集的陶瓷碎片图像数据作为实验数据集,该数据集包括白色青花瓷、红色红釉、绿色绿釉、蓝色青花瓷、彩色彩瓷、紫色紫釉,最终以颜色来对陶瓷碎片进行分类;
26.所述构建的数据集用于作为efficientnet网络的输入变量,通过efficientnet网络结构中的卷积层和池化层,再通过全连接层的作用产生一个输出变量,从而使输入变量和输出变量构成映射关系;
27.模型扩展通过调整输入图像的大小、网络的深度和宽度实现;所述efficientnet通过一组固定的缩放系数统一缩放所述三个维度,所述efficientnet的规范化复合调参方法使用一个复合系数对三个参数进行复合调整:
[0028][0029][0030][0031]
s.t.α.β2.γ2≈2
ꢀ∝
≥1,β≥1,γ≥1;
[0032]
其中,
∝
,β,γ均是常数,通过网格搜索获得;复合系数通过人工调节,depth表示网络深度、width表示网络宽度、resolution表示分辨率。
[0033]
进一步,所述步骤二中的设计ssa模型对efficientnet模型中的超参数寻优,实现efficientnet网络中隐层神经单元数、学习率、批处理数、迭代次数四个超参数的自适应调整与协同计算包括:
[0034]
对ssa的参数进行设置,其中麻雀种群pop_size数量为30、最大迭代次数max_iter为50、发现者pnum和预警者snum的数量设置设计最佳适配机制;efficientnet模型超参数的解空间;轮转操控的麻雀搜索算法对efficientnet中隐层神经单元数、学习率、批处理数和迭代次数四个超参数设置解空间,ub={200,0.01,30,400}表示解空间的上限,lb={10,0.001,2,900}表示解空间的下限;
[0035]
其中,所述pnum=r*pop_size,pnum=(1-r)*pop_size,r取值范围在(0,1)之间,ub和lb的每一维分别对应的是efficientnet模型隐藏层神经单元、学习率、批处理数、迭代次数的上界和下界;
[0036]
其中,所述利用halton序列和tent映射初始化麻雀种群中每个麻雀的初始位置包括:
[0037]
(1)利用halton序列的所具有的低差异序列的特性,生成在高维空间分布均匀的高效随机数;
[0038]
(2)根据tent映射随机性、便利性和规律性的特征,利用所述特性优化种群的初始位置;其中,所述tent混沌映射的表达式如下:
[0039][0040]
所述tent混沌映射通过贝努力移位变换后表示如下:
[0041]yi+1
=(2yi)mod1;
[0042]
(3)对tent混沌沌映射通过贝努力移位变换的表达式为:
[0043][0044]
改进后的tent混沌映射通过贝努力移位变换的表达式为:
[0045][0046]
式中,n代表的是产生混沌序列的总数,即麻雀种群中麻雀的个数;rand(0,1)代表的是[0,1]之间的随机数;将生成的混沌序列载波到麻雀的求解空间中,公式如下:
[0047]
xi=x
lb
+(x
ub-x
lb
)*yi;
[0048]
式中,xi表示生成的第i个麻雀的初始位置;x
ub
和x
lb
分别代表麻雀位置的上限和下限;
[0049]
经过halton序列和tent混沌映射序列得到麻雀的初始位置之后,计算每个麻雀的适应度,包括:
[0050]
(1)将麻雀个体的空间位置解释为efficientnet模型的超参数,优化efficientnet模型;
[0051]
(2)利用训练数据迭代训练该模型,将训练好的迭代模型通过测试数据得到预测数据的分类准确率accr,利用accr的值做为麻雀的适应度;
[0052]
进一步,所述步骤三中的将麻雀个体按照适应度大小进行排序包括:
[0053]
在每一次迭代过程中将种群中每个麻雀适应度的值按照从小到大进行排序,由于accr作为麻雀的适应度,故麻雀适应度的值越大代表麻雀的位置越好;选出排序过后的最大的麻雀适应度值bestf,最佳的麻雀位置bestx;选出排序过后最小的麻雀适应度值worsef,最差的麻雀位置worsex。
[0054]
所述步骤四中的更新麻雀种群中的发现者的位置包括:
[0055]
发现者的数量占麻雀种群的百分之r,即为按照适应度值从小到大排序后的前r*pop_size只麻雀作为发现者;r2的值是[0,1]之间的随机数,表示的是预警值;st的值设置为0.8,表示的是安全值界限;位置更新公式如下:
[0056][0057]
式中,t为当前的迭代数;t
max
为总的迭代次数,x
i,j
表示的是在第t次迭代中第i个麻雀的位置信息;α代表的是[0,1]之间的随机数;q是服从正态分布的随机数;l表示的是的1
×
d的矩阵,其中该矩阵内每个元素全部为1。
[0058]
当r2<st时,表明预警值小于安全值,意味着此时的觅食环境周围没有捕食者,发现者扩大自己的搜索范围;当r2≥st时,表示预警值大于安全值,意味着此时种群中的麻雀已经发现捕食者,并向其他麻雀发出警报,所有的麻雀必须迅速的飞到其它安全的地方。
[0059]
其中,所述更新麻雀种群中跟随者的位置,包括:
[0060]
跟随者的数量占麻雀种群的(1-r)%,即为按照适应度值从小到大排序后的后(1-r)*pop_size只麻雀作为跟随者。跟随者位置更新公式如下:
[0061][0062]
式中,n为麻雀种群的数量;q是服从正态分布的随机数;表示的是在本次迭代中麻雀最差的位置;表示的是在本次迭代中麻雀最好的位置;a是一个1
×
d的矩阵,a
+
=a
t
(aa
t
)-1
,该矩阵中每个元素的值随机为1或-1。
[0063]
所述更新种群中预警者的位置,包括:
[0064]
选取snum只麻雀进行预警,预警者的数量snum的值为麻雀种群的r%,共有r*pop_size只麻雀进行预警,fi为在本次迭代中第i个麻雀的适应度,fg表示在本次迭代中最优的适应度值,fw表示在本次迭代中最差的适应度值。预警者位置更新公式如下:
[0065][0066]
式中,和分别代表在本次迭代中麻雀最好和最差的位置;β的值是服从均值为0,方差为1的正态分布随机数,表示步长的控制参数;k的值是[-1,1]之间的一个随机数,表示麻雀移动的方向,也是麻雀步长的控制参数;ε是为了避免分母为0的情况出现,设置为一个极小的值。
[0067]
当fi≠fg时,表明此时麻雀的位置处于种群的边缘,特别容易受到捕食者的攻击,迅速转移该麻雀的位置,并将该麻雀的位置转移到当前位置和最好位置之间的随机位置。
[0068]
当fi=fg时,表明此时麻雀的位置处于种群的中间,在意识到捕食者威胁之后,及时向其他麻雀的位置靠拢来避免捕食者的攻击,将该麻雀的位置转移到当前位置和最差位置之间的随机位置。
[0069]
进一步,所述步骤五中的对种群中发现者加入惯性权重因子调节并设计预警模拟机制,当达到预警值threshold时,种群始终没有发现捕食者,将自动启动预警机制,模拟天敌存在的情况,以此跳出局部最优,增强麻雀个体的质量,使用随机迁徙机制改变侦察者的位置;设计最佳适配机制调整加入者和跟随者的比例,并根据个体扰动前后的适应度,判断是否更改麻雀个体的位置。
[0070]
其中,所述改进后发现者和预警者公式如下:
[0071]
所述惯性权重因子:
[0072][0073]
式中,w1=0.2和w2=0.8。
[0074]
所述发现者位置更新:
[0075][0076]
轮转操控:在莱维飞行的基础上,改进搜索方式,扩大解空间集的寻优范围。随机迁徙机制fly计算公式如下:
[0077][0078][0079]
式中,σ是常数,r1和r2为0到1之间的随机数,β0=1.5,γ表示伽马函数。
[0080][0081]
所述步骤六中的判断是否达到终止条件包括:
[0082]
所述终止条件为:(1)是否达到最大迭代次数;(2)得到期望的全局最优值。
[0083]
若满足所述终止条件,则将最终麻雀的最优位置解释为efficientnet模型的超参数;将所述超参数代入efficientnet模型中,构建完整的efficientnet模型;利用数据集中的训练集和测试集对模型进行训练,并用训练好的模型对测试集进行预测;若不满足所述终止条件,则返回到步骤五。
[0084]
本发明的另一目的在于提供一种实施所述的陶瓷碎片分类方法的陶瓷碎片分类系统,所述陶瓷碎片分类系统包括:
[0085]
数据集构建模块,用于将陶瓷碎片按照颜色来构建成数据集,将数据集进行预处理,并按照8:2的比例划分为训练集和测试集;
[0086]
efficientnet模型构建模块,用于初步构建efficientnet模型,确定预测模型的结构;
[0087]
适应度计算模块,用于设置麻雀搜索算法的参数值,用halton序列和tent映射初始化种群中麻雀个体的初始位置,并计算种群中麻雀个体的适应度;
[0088]
适应度排序模块,用于对麻雀个体按照适应度进行排序,并选出最好的麻雀位置和最坏的麻雀位置;
[0089]
位置更新模块,用于更新种群中发现者的位置,更新种群中跟随者的位置,同时更新种群中预警者的位置;
[0090]
更新加入者、预警者位置模块,用于利用改进的位置更新公式,判断个体变化前后的适应度中最优适应度是否达到期望最优值;若未达到最优值,则判断是否达到最大迭代次数,即执行终止条件判断模块;若达到最优值,则建立与efficientnet网络之间的关系;
[0091]
终止条件判断模块,用于判断是否满足终止条件;若满足,则构建最终efficientnet预测模型;若不满足,则返回适应度排序模块。
[0092]
本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如下步骤:
[0093]
构建数据集,对数据集进行预处理后,按比例划分为训练集和测试集;初步构建efficientnet模型,确定预测模型的结构;设置麻雀搜索算法的参数值,用halton序列和tent映射初始化种群中麻雀个体位置,并计算种群中麻雀个体的适应度值;对麻雀个体按照适应度进行排序,选出最好的麻雀位置和最坏的麻雀位置,并更新种群中发现者、跟随者
和预警者的位置;对种群中发现者加入惯性权重因子调节,利用随机迁徙机制改变侦察者位置,设计了最佳适配机制对发现者和加入者的比例调整,根据个体变化前后的适应度判断是否更改个体位置;判断是否满足终止条件;若满足,则构建最终的efficientnet模型;若不满足,则返回适应度排序步骤。
[0094]
本发明的另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如下步骤:
[0095]
构建数据集,对数据集进行预处理后,按比例划分为训练集和测试集;初步构建efficientnet模型,确定预测模型的结构;设置麻雀搜索算法的参数值,用halton序列和tent映射初始化种群中麻雀个体位置,并计算种群中麻雀个体的适应度值;对麻雀个体按照适应度进行排序,选出最好的麻雀位置和最坏的麻雀位置,并更新种群中发现者、跟随者和预警者的位置;对种群中发现者加入惯性权重因子调节,利用随机迁徙机制改变侦察者位置,设计了最佳适配机制对发现者和加入者的比例调整,根据个体变化前后的适应度判断是否更改个体位置;判断是否满足终止条件;若满足,则构建最终的efficientnet模型;若不满足,则返回适应度排序步骤。
[0096]
本发明的另一目的在于提供一种信息数据处理终端,所述信息数据处理终端用于实现所述的陶瓷碎片分类系统。
[0097]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明提供的陶瓷碎片分类方法,具体涉及一种基于轮转操控策略的麻雀优化的陶瓷碎片分类方法(rcssa-efficientnet),主要是对陶瓷碎片进行分类。
[0098]
针对碎片采集时受到人为因素和客观因素的影响,本发明需要先对数据集进行预处理,然后建立基于efficientnet网络模型,降低隐含层结点激活概率、去除随机影响因素,抽取本质数据特征,提高分类准确率。其次,针对efficientnet模型结合了深度、宽度、分辨率三个维度使得网络变得较为复杂,易产生过拟合和计算复杂度代价高问题,本发明设计了基于轮转操控的麻雀优化模型;在该模型中,利用halton序列和tent映射对麻雀种群初始化并计算适应度,提升麻雀种群的分布均匀性,通过麻雀算法对efficientnet模型中隐层的神经单元数、学习率、批处理数、迭代次数四个超参数寻优,同时设计轮转操控开发可能存在的全局最优解区域,提高种群多样性,进而实现基于表示稀疏的efficientnet网络结构紧致性优化,提升分类预测精度,有效解决数据预测能力弱与计算复杂代价高昂问题。
[0099]
由仿真实验可知,四个模型的分类准确率分别为95.57%、94.36%、93.68%、91.23%;其中rcssa-efficientnet模型准确率最高,可以得出本发明提出的rcssa-efficientnet模型,结合rcssa算法出色的参数寻优能力、融合efficientnet网络的动态预测优势,提高了陶瓷碎片分类的精度和泛化能力。
附图说明
[0100]
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0101]
图1是本发明实施例提供的陶瓷碎片分类方法流程图。
[0102]
图2是本发明实施例提供的陶瓷碎片分类系统结构框图;
[0103]
图中:1、数据集构建模块;2、efficientnet模型构建模块;3、适应度计算模块;4、适应度排序模块;5、位置更新模块;6、更新加入者、预警者位置模块;7、终止条件判断模块。
[0104]
图3是本发明实施例提供的陶瓷碎片数据集样例示意图。
[0105]
图4是本发明实施例提供的陶瓷碎片分类模型图。
[0106]
图5是本发明实施例提供的halton映射和随机方式初始化的粒子分布对比图,在[0,1]范围内产生规模为200的种群在二维空间上的随机数分布示意图。
[0107]
图5a是本发明实施例提供的使用halton映射初始化的示意图。
[0108]
图5b是本发明实施例提供的随机初始化的示意图。
[0109]
图6a是本发明实施例提供的efficientnet网络的框架图;
[0110]
图中:a)基准网络示意图;b)增加网络width即增加卷积核的个数(增加特征矩阵的channels);c)增加网络depth;d)增加网络分辨率resolution;e)同时增加网络的width、depth、resolution。
[0111]
图6b是本发明实施例提供的mbconv结构示意图。
[0112]
图7是本发明实施例提供的训练效果图。
[0113]
图7a是本发明实施例提供的损失率示意图。
[0114]
图7b是本发明实施例提供的准确率示意图。
具体实施方式
[0115]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0116]
针对现有技术存在的问题,本发明提供了一种基于轮转操控策略麻雀优化的efficientnet陶瓷碎片分类方法,下面结合附图对本发明作详细的描述。
[0117]
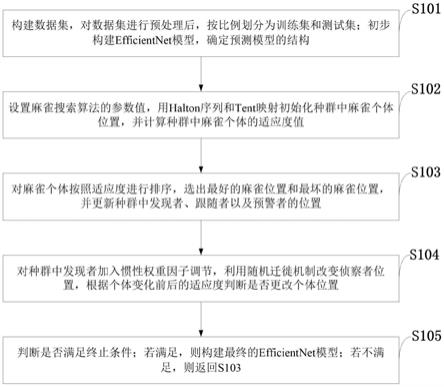
如图1所示,本发明实施例提供的陶瓷碎片分类方法包括以下步骤:
[0118]
s101,构建数据集,对数据集进行预处理后,按比例划分为训练集和测试集;初步构建efficientnet模型,确定预测模型的结构;
[0119]
s102,设置麻雀搜索算法的参数值,用halton序列和tent映射初始化种群中麻雀个体位置,并计算种群中麻雀个体的适应度值;
[0120]
s103,对麻雀个体按照适应度进行排序,选出最好的麻雀位置和最坏的麻雀位置,并更新种群中发现者、跟随者以及预警者的位置;
[0121]
s104,对种群中发现者加入惯性权重因子调节,利用随机迁徙机制改变侦察者位置,根据个体变化前后的适应度判断是否更改个体位置;
[0122]
s105,判断是否满足终止条件;若满足,则构建最终的efficientnet模型;若不满足,则返回s103。
[0123]
如图2所示,本发明实施例提供的陶瓷碎片分类系统包括:
[0124]
数据集构建模块1,用于将陶瓷碎片按照颜色来构建成数据集,将数据集进行预处理,并按照8:2的比例划分为训练集和测试集;
[0125]
efficientnet模型构建模块2,用于初步构建efficientnet模型,确定预测模型的结构;
[0126]
适应度计算模块3,用于设置麻雀搜索算法的参数值,用halton序列和tent映射初始化种群中麻雀个体的初始位置,并计算种群中麻雀个体的适应度;
[0127]
适应度排序模块4,用于对麻雀个体按照适应度进行排序,并选出最好的麻雀位置和最坏的麻雀位置;
[0128]
位置更新模块5,用于更新种群中发现者的位置,更新种群中跟随者的位置,同时更新种群中预警者的位置;
[0129]
更新加入者、预警者位置模块6,用于利用改进的位置更新公式,判断个体变化前后的适应度中最优适应度是否达到期望最优值;若未达到最优值,则判断是否达到最大迭代次数,即执行终止条件判断模块;若达到最优值,则建立与efficientnet网络之间的关系;
[0130]
终止条件判断模块7,用于判断是否满足终止条件;若满足,则构建最终efficientnet预测模型;若不满足,则返回适应度排序模块。
[0131]
下面结合具体实施例对本发明的技术方案作进一步描述。
[0132]
针对现有技术存在的问题,本发明公开了一种基于轮转操控策略的麻雀优化的陶瓷碎片分类方法(rcssa-efficientnet)。
[0133]
本发明内容具体实现过程,一种基于轮转操控策略的麻雀优化的陶瓷碎片分类方法,所述方法包括以下步骤:
[0134]
步骤一,针对陶瓷碎片数据的采集通常容易受到环境自身因素(由于年限久远,很多碎片自身携带的特征基本已经消褪、碎片孔洞、拍摄时的光照、扫描角度、噪声数据)、设备因素(设备精度、设备损坏)等客观因素的影响,导致所采集到的样本数据中常常存在大规模、非线性、数据缺失、信息冗余度高、模糊、不确定、高噪声的问题,建立efficientnet模型,通过对采集的实验室陶瓷碎片数据进行预处理后,提取碎片数据特征,建立数据集;将数据集按8:2比例划分为训练集和测试集。
[0135]
本发明实施例提供的陶瓷碎片数据集样例示意图如图3所示。
[0136]
步骤二,设计ssa模型对efficientnet模型中的超参数寻优,实现efficientnet网络中隐层神经单元数、学习率、批处理数、迭代次数四个超参数的协同计算与自适应调整;
[0137]
本发明实施例提供的陶瓷碎片分类模型图如图4所示。
[0138]
步骤三,将ssa模型中的麻雀个体按照适应度大小进行排序,由此确定最好的麻雀位置和最坏的麻雀位置,并划分发现者和加入者种群;其中最好的麻雀位置代表整个种群搜索到具有丰富食物的区域,为所有的加入者提供觅食的区域和方向;
[0139]
步骤四,更新ssa模型中发现者、跟随者、预警者的位置,发现者负责为整个麻雀种群寻找食物并为所有跟随者提供觅食的方向;跟随者会根据发现者的位置获取食物;然后,更新种群中预警者的位置,当意识到危险时,群体边缘的麻雀会迅速向安全区域移动,以获得更好的位置;
[0140]
步骤五,考虑到ssa中加入者、侦察者位置改变易导致全局与局部的不平衡,因此对其进行改进。对种群中发现者加入惯性权重因子调节,同时使用预警模拟机制
‑‑
当达到预警值threshold时,种群始终没有发现捕食者,将自动启动预警机制,模拟天敌存在的情
况,以此跳出局部最优,增强麻雀个体的质量,对侦察者使用随机迁徙机制改变其位置,设计了最佳适配机制调整加入者和跟随者的比例,为算法在迭代寻优的过程中提高算法精度;并根据个体扰动前后的适应度,来判断是否更改麻雀个体的位置;若没有得到期望最优值,直接执行步骤六;
[0141]
步骤六,判断ssa模型是否达到最大迭代次数;若满足,则结合算法搜索的最佳超参数值构建最终的efficientnet预测模型,然后用训练数据迭代训练该模型,将训练好的迭代模型通过测试数据得到预测数据;若不满足终止条件,则返回步骤五。
[0142]
进一步,步骤一中,针对陶瓷碎片数据的采集通常容易受到环境自身因素、设备因素等客观因素的影响,导致所采集到的样本数据中常常存在大规模、非线性、数据缺失、信息冗余度高、模糊、不确定、高噪声的问题,建立efficientnet模型,通过对采集的实验室陶瓷碎片数据进行预处理后,提取碎片数据特征,建立数据集;将数据集按8∶2比例划分为训练集和测试集;其中,所述数据集使用的是以本人所在可视化所采集的陶瓷碎片图像数据作为实验数据集,该数据集包括青花瓷(白色)、红釉(红色)、绿釉(绿色)、青花瓷(蓝色)、彩瓷(彩色)、紫釉(紫色),最终以颜色来对陶瓷碎片进行分类:
[0143]
所述构建的数据集是用于作为efficientnet网络的输入变量,通过efficientnet网络结构中的卷积层和池化层,最后再通过全连接层的作用产生一个输出变量,从而使输入变量和输出变量构成映射关系;
[0144]
模型扩展(model scaling)一直以来都是提高卷积神经网络效果的重要方法,在扩展网络的时候,一般通过调整输入图像的大小、网络的深度和宽度(卷积通道数,也就是channel数)。在efficientnet之前,研究工作只是针对这三个维度中的某一个维度进行调整,而efficientnet结合了这三个优点,很好的平衡深度depth、宽度width和分辨率resolution这三个维度,通过一组固定的缩放系数统一缩放这三个维度,efficientnet的规范化复合调参方法使用了一个复合系数来对三个参数进行复合调整:
[0145][0146][0147][0148]
s.t.α.β2.γ2≈2
ꢀ∝
≥1,β≥1,γ≥1
ꢀꢀꢀ
(4)
[0149]
其中,
∝
,β,γ都是常数,可以通过网格搜索获得,复合系数通过人工调节。
[0150]
进一步,步骤二中,设计ssa模型对efficientnet模型中的超参数寻优,实现efficientnet网络中隐层神经单元数、学习率、批处理数、迭代次数四个超参数的自适应调整与协同计算,包括:
[0151]
对ssa的参数进行设置,其中麻雀种群pop_size数量为30、最大迭代次数max_iter为50、发现者pnum和预警者snum的数量设置设计了最佳适配机制;efficientnet模型超参数的解空间;轮转操控的麻雀搜索算法对efficientnet中隐层神经单元数、学习率、批处理数、迭代次数四个超参数设置解空间,ub={200,0.01,30,400}表示解空间的上限,lb={10,0.001,2,900}表示解空间的下限;
[0152]
其中,所述pnum=r*pop_size,pnum=(1-r)*pop_size,r取值范围在(0,1)之间,ub和lb的每一维分别对应的是efficientnet模型隐藏层神经单元、学习率、批处理数、迭代
次数的上界和下界;
[0153]
所述用halton序列和tent映射初始化麻雀种群中每个麻雀的初始位置,包括:
[0154]
1)利用halton序列的所具有的低差异序列的特性:可生成在高维空间分布均匀的高效随机数,进而提高种群分布均匀性。
[0155]
2)根据tent映射随机性、便利性和规律性的特征,利用这些特性优化种群的初始位置,tent混沌序列能够有效保持种群寻优的多样性;
[0156]
tent混沌映射的表达式如下:
[0157][0158]
tent混沌映射通过贝努力移位变换后表示如下:
[0159]yi+1
=(2yi)mod1
ꢀꢀꢀ
(6)
[0160]
3)对tent混沌沌映射通过贝努力移位变换的表达式为:
[0161][0162]
改进后的tent混沌映射通过贝努力移位变换的表达式为:
[0163][0164]
在公式(8)中,n代表的是产生混沌序列的总数,也就是麻雀种群中麻雀的个数,rand(0,1)代表的是[0,1]之间的随机数;将生成的混沌序列载波到麻雀的求解空间中,公式如下:
[0165]
xi=x
lb
+(x
ub-x
lb
)*yiꢀꢀꢀ
(9)
[0166]
其中,xi表示生成的第i个麻雀的初始位置;x
ub
和x
lb
分别代表麻雀位置的上限和下限;
[0167]
经过halton序列和tent混沌映射序列得到麻雀的初始位置之后,计算每个麻雀的适应度,包括:
[0168]
1、将麻雀个体的空间位置解释为efficientnet模型的超参数,优化efficientnet模型;
[0169]
2、用训练数据迭代训练该模型,将训练好的迭代模型通过测试数据得到预测数据的分类准确率accr,用accr的值做为麻雀的适应度;
[0170]
本发明实施例提供的halton映射和随机方式初始化的粒子分布对比图如图5所示,在[0,1]范围内产生规模为200的种群在二维空间上的随机数分布。易知halton序列产生的种群分布更加均匀,不会出现粒子在某一范围内聚集的现象,进而使得麻雀种群初始化个体的位置在解空间中的均匀性分布。
[0171]
进一步,步骤三中,所述将麻雀个体按照适应度大小进行排序,包括:
[0172]
在每一次迭代过程中将种群中每个麻雀适应度的值按照从小到大进行排序,因为accr作为麻雀的适应度,所以麻雀适应度的值越大代表麻雀的位置越好;选出排序过后的最大的麻雀适应度值bestf,最佳的麻雀位置bestx;选出排序过后最小的麻雀适应度值
worsef,最差的麻雀位置worsex。
[0173]
进一步,步骤四中,所述更新麻雀种群中的发现者的位置,包括:
[0174]
发现者的数量占麻雀种群的百分之r,即为按照适应度值从小到大排序后的前r*pop_size只麻雀作为发现者;r2的值是[0,1]之间的随机数,表示的是预警值;st的值设置为0.8,表示的是安全值界限;位置更新公式如下:
[0175][0176]
其中,t为当前的迭代数,t
max
为总的迭代次数,x
i,j
表示的是在第t次迭代中第i个麻雀的位置信息,α代表的是[0,1]之间的随机数。q是服从正态分布的随机数,l表示的是的1
×
d的矩阵,其中该矩阵内每个元素全部为1。
[0177]
当r2<st时,表明预警值小于安全值,意味着此时的觅食环境周围没有捕食者,发现者可以扩大自己的搜索范围。当r2≥st时,表示预警值大于安全值,意味着此时种群中的麻雀已经发现了捕食者,并向其他麻雀发出警报,所有的麻雀必须迅速的飞到其它安全的地方。
[0178]
所述更新麻雀种群中跟随者的位置,包括:
[0179]
跟随者的数量占麻雀种群的(1-r)%,即为按照适应度值从小到大排序后的后(1-r)*pop_size只麻雀作为跟随者。跟随者位置更新公式如下:
[0180][0181]
其中,n为麻雀种群的数量,q是服从正态分布的随机数,表示的是在本次迭代中麻雀最差的位置,表示的是在本次迭代中麻雀最好的位置,a是一个1
×
d的矩阵,a
+
=a
t
(aa
t
)-1
,该矩阵中每个元素的值随机为1或-1。
[0182]
所述更新种群中预警者的位置,包括:
[0183]
选取snum只麻雀进行预警,预警者的数量snum的值为麻雀种群的r%,共有r*pop_size只麻雀进行预警,fi为在本次迭代中第i个麻雀的适应度,fg表示在本次迭代中最优的适应度值,fw表示在本次迭代中最差的适应度值。预警者位置更新公式如下:
[0184][0185]
其中,和分别代表在本次迭代中麻雀最好和最差的位置;β的值是服从均值为0,方差为1的正态分布随机数,表示步长的控制参数;k的值是[-1,1]之间的一个随机数,表示麻雀移动的方向,也是麻雀步长的控制参数;ε是为了避免分母为0的情况出现,设置为一个极小的值。
[0186]
当fi≠fg时,表明此时麻雀的位置处于种群的边缘,特别容易受到捕食者的攻击,迅速转移该麻雀的位置,并将该麻雀的位置转移到当前位置和最好位置之间的随机位置。
[0187]
当fi=fg时,表明此时麻雀的位置处于种群的中间,在意识到捕食者威胁之后,及
时向其他麻雀的位置靠拢来避免捕食者的攻击,将该麻雀的位置转移到当前位置和最差位置之间的随机位置。
[0188]
进一步,步骤五中,所述对种群中发现者加入惯性权重因子调节并设计了预警模拟机制来避免长期无捕食者存在的情况所带来的问题,对侦察者使用随机迁徙机制改变其位置,并根据个体扰动前后的适应度,来判断是否更改麻雀个体的位置。改进后发现者和预警者公式如下:
[0189]
惯性权重因子:
[0190][0191]
式子中w1=0.2和w2=0.8。
[0192]
发现者位置更新:
[0193][0194]
轮转操控:在莱维飞行的基础上,改进了搜索方式,扩大了解空间集的寻优范围。随机迁徙机制fly计算公式如下:
[0195][0196][0197]
其中σ是一个常数,r1和r2为0到1之间的随机数,β0=1.5,γ表示伽马函数。
[0198][0199]
进一步,步骤六中,所述判断是否达到终止条件,包括:
[0200]
所述终止条件设置如下:(1)是否达到了最大迭代次数;(2)得到期望的全局最优值;
[0201]
若满足终止条件,将最终麻雀的最优位置解释为efficientnet模型的超参数。在本发明中得到最优的适应度值为0.962,得到最优的麻雀位置为x={64,0.0027,14,608}。其中隐藏层单元为64,学习率为0.0027,批处理数为14,迭代次数为608。将这些超参数代入到efficientnet模型中,构建完整的efficientnet模型。然后用数据集中的训练集和测试集对模型进行训练,最后用训练好的模型对测试集进行预测。
[0202]
若不满足终止条件,则返回到步骤5。
[0203]
表1四个模型在测试集准确率(accr)
[0204]
模型rcssa-efficientnetissa-efficientnetcssoa-efficientnetssa-efficientnetaccr95.57%94.36%93.68%91.23%
[0205]
如表1所示,四个模型的分类准确率分别为95.57%、94.36%、93.68%、91.23%。
其中rcssa-efficientnet模型准确率最高,可以得出本发明提出的rcssa-efficientnet模型,结合rcssa算法出色的参数寻优能力、融合efficientnet网络的动态预测优势,提高了陶瓷碎片分类的精度和泛化能力。
[0206]
图6是本发明实施例提供的efficientnet网络的框架图,共包含三部分,图6a为第一部分,由a)基准网络示意图、b)增加网络width即增加卷积核的个数(增加特征矩阵的channels)、c)增加网络depth、d)增加网络分辨率resolution、e)同时增加网络的width、depth、resolution组成;第二部分为efficientnet-b0的网络框架(b1-b7就是在b0的基础上修改resolution,channels以及layers)(见表2);第三部分为mbconv结构,如图6b所示。
[0207]
表2 efficientnet-b0的网络框架
[0208][0209]
针对碎片采集时受到人为因素和客观因素的影响,需要先对数据集进行预处理,然后建立基于efficientnet网络模型,降低隐含层结点激活概率、去除随机影响因素,抽取本质数据特征,提高分类准确率。其次,针对efficientnet模型结合了深度、宽度、分辨率三个维度使得网络变得较为复杂,易产生过拟合和计算复杂度代价高问题,设计基于轮转操控的麻雀优化模型;在该模型中,利用halton序列和tent映射对麻雀种群初始化并计算适应度,提升麻雀种群的分布均匀性,通过麻雀算法对efficientnet模型中隐层的神经单元数、学习率、批处理数、迭代次数四个超参数寻优,同时设计轮转操控开发可能存在的全局最优解区域,提高种群多样性,进而实现基于表示稀疏的efficientnet网络结构紧致性优化,提升分类预测精度,有效解决数据预测能力弱与计算复杂代价高昂问题。
[0210]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用全部或部分地以计算机程序产品的形式实现,所述计算机程序产品包括一个或多个计算机指令。在计算机上加载或执行所述计算机程序指令时,全部或部分地产生按照本发明实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(dsl)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输)。所述计算机可读取存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质(例如软盘、硬盘、磁带)、光介质(例如dvd)、或者半导体介质(例如固态硬盘solid state disk(ssd))等。
[0211]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1