一种小型反射器反射面板自动调节优化设计方法
1.本发明属于信号采集领域,具体涉及一种小型反射器反射面板自动调节优化设计方法。
背景技术:
2.随着移动通信技术向5g普及,配套的移动设备对信号的需求越来越高,但部分地区或住宅的部分区域仍存在信号不良的情况。小型反射器能够轻易地安装于各种场所,在信号接收与信号增幅等方面有很大的潜力。
3.对于个人来说,最重要的是其安装的简便性及信号的接收率,能安装于各种场所且能根据安装的位置进行调整以获得良好的信号接收率。反射器的信号接收率是由多方面决定的,最主要的是反射面板、索网结构。将这两部分与不同安装位置结合起来便能设计出信号接收率最好的反射器。由于反射面板、索网结构相互均有联系,实际设计中对于各节点的分析是一大难点。
4.反射器的反射面(如卫星接收天线)一般是一个金属抛物面,根据抛物面的性质,信号可以通过抛物面的反射后集中到位于焦点处的信号接收装置内。反射的旋转抛物面口径越大,接收信号质量越高。但是考虑到成本与安装空间等因素,用户往往要求在保证接收信号质量的前提下,尽量减小口径。市面上反射器的反射面多为固定形状的抛物面,随着带观测天体位置的变化,系统调整整个反射器的方位来定位。因此,这种设计方法是通过整体调节的方法来实现信号接收,这会使信号接收比较差,在实际运用过程中存在诸多问题。
5.中国天眼是500米口径球面射电望远镜,其大体结构包括三角形反射面板、信号接收装置、支撑底座、索网结构等,索网按照短程线三角网格方式构成,支承其上每个网格中的三角反射面板,整个索网固定在支撑底座上。每个连接节点都连接一根下拉机构,下拉机构下端与固定在支撑底座上的驱动装置连接,每个下拉机构配合被一个驱动装置,驱动装置通过带动下拉机构移动,使索网变换姿态,以此实现对索网的形态控制,三角反射面板间存在一定缝隙,能够确保变位时不会被挤压变形。申请人依据中国天眼的结构,提出一种小型反射器反射面板自动调节优化设计方法,解决上述问题。
技术实现要素:
6.本发明的目的在于提供一种小型反射器反射面板自动调节优化设计方法,可安装于各种场景,通过调整反射面板,在保证信号接收质量的前提下,减小对驱动器的要求,为安装提供便利。
7.一种小型反射器反射面板自动调节优化设计方法,所述反射器包括支撑底座、设置于支撑底座上的索网、布满索网的三角反射面板、用以带动索网的连接节点活动的下拉机构及用以驱动下拉机构活动的驱动装置,所述设计方法包括:
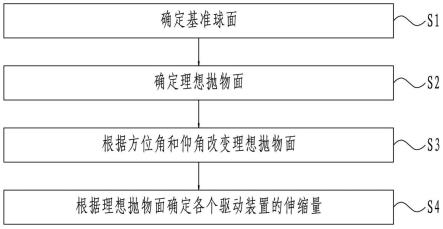
8.s1确定基准球面
9.首先,假设反射面在未工作的基准态时,所有连接节点在一个基准球面上,球面的
半径为r,球面的口径为d,然后,以基准球面的圆心c点为坐标原点,竖直向上为z轴建立空间直角坐标系,反射面板的任意一个顶点的坐标都符合球面方程:x2+y2+z2=r2;
10.s2确定理想抛物面
11.信号源的方位用方位角α和仰角β来表示,当观测天体观测角α=0
°
、β=90
°
,即初始状态时,设抛物面焦点为抛物面的口径为g,抛物面顶点为(0,0,-r),则理想抛物面的方程为:x2+y2=2p(z+r);
12.将三维的体积差转化为二维的面积差,因此建立优化模型如下:
13.决策变量:
14.p
15.目标函数:
[0016][0017]
约束条件:
[0018][0019]
s3根据方位角和仰角改变理想抛物面
[0020]
当信号源的方位角为α
′
,仰角为β
′
时,抛物面须要从α=0
°
、β=90
°
时的形态,先绕z轴旋转α
′
,再绕y轴旋转90
°‑
β
′
后得到信号源位于α
′
、β
′
时的理想抛物面,
[0021]
设调节前工作抛物面上的连接节点坐标为(x1,y1,z1),对于调节后工作抛物面上的(x,y,z),有:
[0022][0023]
进一步地,所述设计方法还包括s4,
[0024]
s4根据理想抛物面确定各个驱动装置的伸缩量
[0025]
建立以各个驱动装置的伸缩量为决策变量、以抛物面方程为约束条件、以反射面与理想抛物面位置差最小为目标函数的优化模型,从而确定各个驱动装置的伸缩量,
[0026]
决策变量:
[0027]di
=|a
ibi
|
[0028]
目标函数:
[0029][0030]
约束条件:
[0031][0032]
通过该模型,求得反射平面与理想抛物面体积差最小时各驱动装置的伸缩量。
[0033]
与现有技术相比,本发明的有益效果是:本发明能够改进对反射面板调节的计算方法,提供一套更高效、经济的小型可调节反射器反射面板设计方案,使反射器能根据信号源的位置,改变反射面的形状以到达最高的接收效率。而且本发明的反射器安装所需的空间更小,对驱动装置要求更低。
附图说明
[0034]
图1为本发明流程图;
[0035]
图2为本发明的反射器部分结构示意图之一;
[0036]
图3为本发明的反射器部分结构示意图之二;
[0037]
图4为本发明中理想抛物面与基准球面的面积差示意图;
[0038]
图5为本发明中理想抛物面与基准球面示意图;
[0039]
图6为本发明中信号源的方位角及仰角示意图;
[0040]
图7为本发明中信号源变化后移的反射器部分结构示意图;
[0041]
图8为本发明中理想抛物面与基准球面的差值示意图。
具体实施方式
[0042]
在本发明的描述中,需要理解的是,术语“一端”、“另一端”、“外侧”、“上”、“内侧”、“水平”、“同轴”、“中央”、“端部”、“长度”、“外端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0043]
下面结合附图对本发明作进一步说明。
[0044]
请参阅图1-8,一种小型反射器反射面板自动调节优化设计方法,包括:
[0045]
s1确定基准球面
[0046]
首先,假设反射面在未工作的基准态时,所有连接节点在一个基准球面上,球面的半径为r,球面的口径为d。然后,以基准球面的圆心c点为坐标原点,竖直向上为z轴建立空间直角坐标系,如见图3所示,故反射面板的任意一个顶点都符合球面方程:x2+y2+z2=r2。
[0047]
s2确定理想抛物面
[0048]
信号源的方位可以用方位角α和仰角β来表示,当观测天体观测角α=0
°
、β=90
°
,即初始状态时,如图3所示,设抛物面焦点为抛物面的口径为g,抛物面顶点为(0,0,-r),故理想抛物面的方程为:x2+y2=2p(z+r)。
[0049]
为了使反射器的能耗最小,则需要寻找一个与基准球面最接近的理想抛物面。为了简化模型,将三维的体积差转化为二维的面积差,如图4、5所示,建立优化模型如下:
[0050]
决策变量:
[0051]
p
[0052]
目标函数:
[0053][0054]
约束条件:
[0055][0056]
s3根据方位角和仰角改变理想抛物面
[0057]
如图6所示,当信号源的方位角为α
′
,仰角为β
′
时,抛物面须要从α=0
°
、β=90
°
时的形态,先绕z轴旋转α
′
,再绕y轴旋转90
°‑
β
′
后得到信号源位于α
′
、β
′
时的理想抛物面,如图7所示。
[0058]
设调节前工作抛物面上的连接节点坐标为(x1,y1,z1),对于调节后工作抛物面上的(x,y,z),有:
[0059][0060]
s4根据理想抛物面确定各个驱动装置的伸缩量
[0061]
为了使接收信号最好,需要将工作状态的反射面尽量贴近理想抛物面,由此建立以各个驱动装置的伸缩量为决策变量、以抛物面方程为约束条件、以反射面与理想抛物面位置差最小为目标函数的优化模型,从而确定各个驱动装置的伸缩量,如图8所示。
[0062]
决策变量:
[0063]di
=|a
ibi
|
[0064]
目标函数
[0065][0066]
约束条件
[0067][0068]
通过该模型,可求得反射平面与理想抛物面体积差最小时各驱动装置的伸缩量。
[0069]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1