一种基于证据权和分形的全月着陆区选址方法
1.本技术属于图像处理技术领域,具体涉及一种基于证据权和分形的全月着陆区选址方法。
背景技术:
2.月球是地球唯一的天然卫星,也是除流星和人造天体之外离我们最近的天体,很自然的成为初期深空探测的重点。另外,月球探测有利于科学技术的发展,对月球的探测活动不仅能够揭示科学的奥秘,还可以带动其他领域科学技术的发展,如运载火箭、人工智能、机器人、遥控作业、高超音速飞行等,能够给国民经济带来极大的利益。
3.目前,国内外对于全月着陆区选址的主要方法是专家根据科学需求在工程约束条件下确定适宜的着陆区。这样虽然可以圈定出着陆区范围,但是工作量较大且人为因素干预较多。因此,通常需要大量的专业知识才能较好地选取着陆范围。
4.鉴于此,提供一种基于证据权和分形的全月着陆区选址方法,实现在全月着陆选址过程中,在一定程度上减少工作量和人为因素干预。
技术实现要素:
5.(一)要解决的技术问题
6.鉴于现有技术的上述缺点、不足,本技术提供一种基于证据权和分形的全月着陆区选址方法。
7.(二)技术方案
8.为达到上述目的,本技术采用如下技术方案:
9.第一方面,本技术提供一种基于证据权和分形的全月着陆区选址方法,包括:
10.s1、对全月范围进行网格划分,计算每个单元网格中所含有的撞击坑个数,并通过计算网格均值获得每个证据因子所对应的网络均值层;
11.所述网格均值为单元网格内的像素点的均值;
12.所述证据因子包括月壳厚度、粗糙度图、坡度、数字高程模型、重力梯度、氧化铁含量分布以及月壤光学成熟度;
13.s2、通过二态变量表示每个网络均值层和目标图层,计算先验几率o
先验
,以及每个证据因子在每个单元网格中的权重和后验概率p
后验
;
14.所述目标图层包括apollo 11、12、13、14、15、16、17号,luna 16、17、20、21、23、24号,surveyor 1、2、3、5、6、7号,chang
′
e 3、ranger 6、7、8、9号,crail及ladee共50个已着陆点;
15.s3、基于分形理论,统计出全部单元网格中含有多于s个撞击坑的单元网格的总数a,通过log(s)-log(a)双对数图拟合来确定第一阈值,根据所述第一阈值确定每个单元网格内撞击坑的分布复杂度;
16.其中,s=0,1,...,k,以及a=a0,a1,...,ak;
17.s4、基于第一单元网格和第二单元网格的索引值,降低第一单元网格的后验概率p
后验
,升高第二单元网格的后验概率p
后验
,以获得修正后验概率p
修正后验
;
18.所述第一单元网格为撞击坑个数s大于拐点值t的单元网格;
19.所述第二单元网格为撞击坑个数为0的单元网格;
20.所述索引值为基于全月范围进行网格划分时,所设定的用于区分不同网格的数值;
21.s5、通过对所述修正后验概率p
修正后验
进行颜色渲染,获得后验概率图,将所述后验概率图与专家筛选图层、撞击坑数据库进行结合,进行全月着陆区的选址。
22.可选的,所述s1包括:
23.s11、将每个证据图层的像素点读成二维矩阵;
24.所述证据图层为每个证据因子所对应的图层;
25.s12、将每个证据图层的像素矩阵行列数的公约数作为所划分网格的尺寸,对全月范围内的区域进行网格划分;
26.所述像素矩阵为单元网格内的像素点所形成的矩阵;
27.s13、若证据图层的像素点值不能被网格尺寸所整除,则对所述证据图层的边缘像素点进行裁剪;
28.s14、基于函数cal_avi,遍历各证据图层中每个单元网格内的像素点,计算每个单元网格像素点均值,以获得每个证据因子所对应的网格均值层。
29.可选的,所述s2包括:
30.s21、将每个证据因子所对应的网格均值层表示为0-1变量,以及基于已着陆点坐标,确定每个已着陆点所在的单元网格,用二态变量表示所确定的单元网格;
31.s22、根据总单元网格的个数和含已着陆点单元网格的个数确定先验概率p
先验
,通过证据权重法计算先验几率o
先验
,以及每个证据因子在每个单元网格内的权重和后验概率p
后验
。
32.可选的,所述s21包括:
33.s211、遍历每个网格均值层中的网格均值,根据第二阈值进行判断,若网格均值大于/小于第二阈值,则将网格均值所对应的单元网格设置为“0/1”或“1/0”;
34.所述第二阈值为基于专家知识判断所确定的阈值;
35.s212、将已着陆点坐标范围从-90
°
至90
°
调整为0
°
至180
°
,将-180
°
至180
°
调整为0
°
至360
°
;
36.s213、基于已着陆点坐标,遍历所划分网格,判断单元网格里是否含有已着陆点;通过将存在已着陆点的单元网格设置为“1”,将不含有已着陆点的单元网格设置为“0”,获得已着陆点网格层。
37.可选的,所述s22包括:
38.s221、遍历通过二态变量表示的已着陆点坐标,计算出已着陆点网格层中单元网格表示为“1”的总数m,通过计算得到先验概率p
先验
,其中,n为全月范围划分总单
元网格的个数,通过计算得到先验几率o
先验
。
39.可选的,所述s22还包括:
40.s222、遍历所划分网格,判断不同单元网格所对应位置的网格均值层及已着陆点网格层的状态,具体为:
41.统计在网格均值层和已着陆点网络层中均被设置为“1”的单元网格的个数,将对应单元网格的个数记为count_bd;
42.统计在网格均值层和已着陆点网络层中均被设置为“0”的单元网格的个数,将对应单元网格的个数记为count_nbnd;
43.统计在网格均值层中被设置为“1”,同时在已着陆点网络层中均被设置为“0”的单元网格的个数,将对应单元网格的个数记为count_bnd;
44.统计在网格均值层中被设置为“0”,同时在已着陆点网络层中均被设置为“1”的单元网格的个数,将对应单元网格的个数记为count_nbd;
45.s223、当已着陆点网络层中均被设置为“1”时,则通过以及计算出第一权重w
+
;
46.s224、当已着陆点网络层中均被设置为“0”时,则通过以及计算出第二权重w
+
;
47.s225、对每个证据因子所对应的网络均值层进行上述处理,并结合每个证据因子所对应所对应的第一权重w
+
和第二权重w
+
,获得每个证据因子在每个单元网格中的权重
48.其中,k代表所划分的单元网格,k=1,2,...n;j代表证据因子,j=1,2,...7。
49.可选的,所述s22还包括:
50.s226、计算每个证据因子在每个单元网格中的权重叠加和通过计算得到q,通过计算出后验概率p
后验
;
51.其中,
52.可选的,所述s3包括:
53.获取所述log(s)-log(a)双对数图中两条斜率延长线的交点,将所述交点坐标的横坐标值作为第一阈值。
54.可选的,在s3之后,s4之前,还包括:
55.基于每个单元网格内撞击坑的分布复杂度,对单元网格进行分类,分为第一单元网格和第二单元网格。
56.可选的,所述s4包括:
57.s41、根据第一单元网格和第二单元网格的索引值,确定第一单元网格和第二单元网格;
58.s42、基于降低第一单元网格的后验概率p
后验
,基于升高第二单元网格的后验概率p
后验
,修正每个证据因子在每个单元网格中的后验概率p
后验
,以获得修正后验概率p
修正后验
;
59.其中,α1和α2为基于log(s)-log(a)双对数图所获得的斜率的绝对值,α1>α2。
60.(三)有益效果
61.通过本技术中所述方法进行着陆区选址改变了以往专家根据科学需求在工程约束条件下人工确定适宜着陆地区的传统方式,大大减少了工作量和人为因素干预且不需要大量的专业知识就能较好的圈定着陆范围,对月球探测任务中着陆区选址具有借鉴意义。
附图说明
62.本技术借助于以下附图进行描述:
63.图1为基于证据权和分形的全月着陆区选址方法的计算流程示意图;
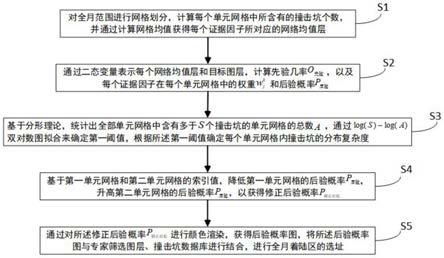
64.图2为基于证据权和分形的全月着陆区选址方法的整体流程示意图;
65.图3为两个证据因子的后验概率结果示意图;
66.图4为五个证据因子的后验概率结果示意图;
67.图5为七个证据因子的后验概率结果示意图;
68.图6为证据权模拟示意图;
69.图7为全月撞击坑分布图;
70.图8为基于降低第一单元网格的后验概率的后验概率图;
71.图9为基于升高第二单元网格的后验概率的后验概率图。
具体实施方式
72.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。可以理解的是,以下所描述的具体的实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合;为了便于描述,附图中仅示出了与发明相关的部分。
73.实施例一提供一种基于证据权和分形的全月着陆区选址方法,根据图1所示,具体为:
74.在具体应用中,证据因子包括月壳厚度、粗糙度图、坡度、数字高程模型、重力梯度、氧化铁含量分布以及月壤光学成熟度,目标图层包括已着陆点;
75.在具体应用中,通过基于数据预处理,完成对全月范围网格的划分、对证据图层的边缘像素点进行裁剪、网络均值的计算,以及对证据图层和目标图层的二态变量表示;
76.在具体应用中,基于证据权重法计算先验概率、每个证据因子在每个单元网格的权重和后验概率;
77.在具体应用中,基于分形理论,通过获取双对数图信息,进行线性回归拟合,计算出第一阈值;
78.在具体应用中,基于第一阈值,对每个证据因子在每个单元网格的后验概率进行修正,以获得修正后验概率;
79.在具体应用中,基于修正后验概率,获得后验概率图,并将后验概率图结合于专家筛选图层、撞击坑数据库,进行全月着陆区选址。
80.通过实施例一所述的方法进行着陆区选址改变了以往专家根据科学需求在工程约束条件下人工确定适宜着陆地区的传统方式,大大减少了工作量和人为因素干预且不需要大量的专业知识就能较好的圈定着陆范围,对月球探测任务中着陆区选址具有借鉴意义。
81.实施例二提供一种基于证据权和分形的全月着陆区选址方法,根据图2所示,具体步骤如下:
82.s1、对全月范围进行网格划分,计算每个单元网格中所含有的撞击坑个数,并通过计算网格均值获得每个证据因子所对应的网络均值层;
83.在本实施例中,所用全月范围为20037.4km*40074.4km,将其划分为72*144个网格,即每个网格大小设置为278.3km*278.3km。
84.在本实施例中,网格均值为单元网格内的像素点的均值,以及,证据因子包括月壳厚度、粗糙度图、坡度、数字高程模型、重力梯度、氧化铁含量分布以及月壤光学成熟度;
85.基于前述的步骤s1,在具体的处理过程中,第一,需要将每个证据图层的像素点读成二维矩阵,其中,证据图层为每个证据因子所对应的图层。
86.第二,需要将每个证据图层的像素矩阵行列数的公约数作为所划分网格的尺寸,对全月范围内的区域进行网格划分,具体的,像素矩阵为单元网格内的像素点所形成的矩阵;
87.第三,若证据图层的像素点值不能被网格尺寸所整除,则对证据图层的边缘像素点进行裁剪;
88.例如,证据因子月壳厚度所对应的证据图层像素点为721*1441,将其裁剪为720*1440以被公约数72*144整除;以及证据因子坡度所对应的证据图层像素矩阵为46080*92160,能被公约数72*144整除,因此不须对其进行边缘像素点裁剪操作。
89.第四,需要基于函数cal_avi,遍历各证据图层中每个单元网格内的像素点,计算每个单元网格像素点均值,以获得每个证据因子所对应的网格均值层;
90.在具体处理过程中,编写计算单元网格内像素点均值的函cal_avi,根据划分网格的尺寸,单元网格依次从左到右、从上到下移动,遍历单元网格内像素点,从而计算每个单元网格的像素点均值。以及,将每个证据因子所对应的作为参数输入函数cal_avi作同样的处理,得到每个证据层的网格均值层。
91.在具体处理过程中,单元网格依次从左到右、从上到下移动,单元网格内所选像素点集合选取具体过程:当0<i<网格行数时,0<j<网格列数时,判断(像素点行数/网格行数)*i<像素矩阵行索引<(像素点行数/网格行数)*(i+1)且(像素点列数/网格列数)*j<像素矩阵行索引<(像素点列数/网格列数)*(j+1)。
92.s2、通过二态变量表示每个网络均值层和目标图层,计算先验几率o
先验
,以及每个
证据因子在每个单元网格中的权重和后验概率p
后验
;
93.本实施例中,目标图层包括apollo 11、12、13、14、15、16、17号,luna 16、17、20、21、23、24号,surveyor 1、2、3、5、6、7号,chang
′
e 3、ranger 6、7、8、9号,crail及ladee共50个已着陆点;
94.基于前述的步骤s2,在具体的处理过程中,需要将每个证据因子所对应的网格均值层表示为0-1变量,以及基于已着陆点坐标,确定每个已着陆点所在的单元网格,用二态变量表示所确定的单元网格,下面对上述步骤进行详细描述:
95.第一,需要遍历每个网格均值层中的网格均值,根据第二阈值进行判断,若网格均值大于/小于第二阈值,则将网格均值所对应的单元网格设置为“0/1”或“1/0”;其中,第二阈值为基于专家知识判断所确定的阈值;
96.第二,需要将已着陆点坐标范围从-90
°
至90
°
调整为0
°
至180
°
,将-180
°
至180
°
调整为0
°
至360
°
;
97.第三,需要基于已着陆点坐标,遍历所划分网格,判断单元网格里是否含有已着陆点;通过将存在已着陆点的单元网格设置为“1”,将不含有已着陆点的单元网格设置为“0”,获得已着陆点网格层;
98.以及,在具体处理过程中,遍历所划分网格,判断单元网格里是否含有已着陆点的具体过程为:当0<i<网格行数时,0<j<网格列数时,判断(180/网格行数)*i<已着陆点x坐标《(180/网格行数)*(i+1)且(360/网格列数)*j<已着陆点y坐标《(360/网格列数)*(j+1)。
99.基于前述的步骤s2,在具体的处理过程中,还需要根据总单元网格的个数和含已着陆点单元网格的个数确定先验概率p
先验
,通过证据权重法计算先验几率o
先验
,以及每个证据因子在每个单元网格内的权重和后验概率p
后验
,下面对上述步骤分别进行详细描述:
100.为了更好的理解,在一种可能的实现过程中,根据总单元网格的个数和含已着陆点单元网格的个数确定先验概率p
先验
,以及通过证据权重法计算先验几率o
先验
的具体步骤如下:
101.遍历通过二态变量表示的已着陆点坐标,计算出已着陆点网格层中单元网格表示为“1”的总数m,通过计算得到先验概率p
先验
,其中,n为全月范围划分总单元网格的个数,通过计算得到先验几率o
先验
。
102.为了更好的理解,在一种可能的实现过程中,通过证据权重法计算每个证据因子在每个单元网格内的权重的具体步骤如下:
103.第一、遍历所划分网格,判断不同单元网格所对应位置的网格均值层及已着陆点网格层的状态,具体为:
104.统计在网格均值层和已着陆点网络层中均被设置为“1”的单元网格的个数,将对应单元网格的个数记为count_bd;
105.统计在网格均值层和已着陆点网络层中均被设置为“0”的单元网格的个数,将对
应单元网格的个数记为count_nbnd;
106.统计在网格均值层中被设置为“1”,同时在已着陆点网络层中均被设置为“0”的单元网格的个数,将对应单元网格的个数记为count_bnd;
107.统计在网格均值层中被设置为“0”,同时在已着陆点网络层中均被设置为“1”的单元网格的个数,将对应单元网格的个数记为count_nbd;
108.第二、当已着陆点网络层中均被设置为“1”时,则通过以及计算出第一权重w
+
;
109.第三、当已着陆点网络层中均被设置为“0”时,则通过以及计算出第二权重w
+
;
110.第四、对每个证据因子所对应的网络均值层进行上述处理,并结合每个证据因子所对应所对应的第一权重w
+
和第二权重w
+
,获得每个证据因子在每个单元网格中的权重
111.其中,k代表所划分的单元网格,k=1,2,...n;j代表证据因子,j=1,2,...7。
112.为了更好的理解,在一种可能的实现过程中,通过证据权重法计算每个证据因子在每个单元网格内的后验概率p
后验
具体步骤如下:
113.计算每个证据因子在每个单元网格中的权重叠加和通过计算得到q,通过计算出后验概率p
后验
;其中,
114.另外,本实施例中,通过计算所得到的后验概率p
后验
越大,则表明越适宜着陆。
115.本实施例中,图3为两个证据因子的后验概率结果示意图,图4为五个证据因子的后验概率结果示意图,以及图5为七个证据因子的后验概率结果示意图。
116.本实施例中,图6为证据权模拟示意图,以5个证据图层示意,全月划分为3*3的方格,黑色点为已着陆点。对于中间单元网格而言,由于该单元网格内含有已着陆点,该单元网格对应位置的证据因子的情况代表该处着陆有利。
117.s3、基于分形理论,统计出全部单元网格中含有多于s个撞击坑的单元网格的总数a,通过log(s)-log(a)双对数图拟合来确定第一阈值,根据所述第一阈值确定每个单元网格内撞击坑的分布复杂度;
118.其中,s=0,1,...,k,以及a=a0,a1,...,ak;
119.本实施例中,图7为全月撞击坑分布图。
120.在具体处理过程中,遍历所划分网格,判断单元网格里包含大于撞击坑个数的单元格总数s具体过程:当0<i<网格行数时,0<j<网格列数时,判断(180/网格行数)*i<撞击坑圆心x坐标《(180/网格行数)*(i+1)且(360/网格列数)*j<撞击坑圆心y坐标《(360/网格列数)*(j+1)。
121.基于前述的步骤s3,在具体的处理过程中,需要获取所述log(s)-log(a)双对数图中两条斜率延长线的交点,将所述交点坐标的横坐标值作为第一阈值。
122.另外,在具体应用中,在步骤s3之后,s4之前,需要基于每个单元网格内撞击坑的分布复杂度,对单元网格进行分类,分为第一单元网格和第二单元网格。
123.s4、基于第一单元网格和第二单元网格的索引值,降低第一单元网格的后验概率p
后验
,升高第二单元网格的后验概率p
后验
,以获得修正后验概率p
修正后验
;
124.本实施例中,第一单元网格为撞击坑个数s大于拐点值t的单元网格,第二单元网格为撞击坑个数为0的单元网格;
125.本实施例中,索引值为基于全月范围进行网格划分时,所设定的用于区分不同网格的数值;
126.基于前述的步骤s4,在具体的处理过程中,第一,需要根据第一单元网格和第二单元网格的索引值,确定第一单元网格和第二单元网格;
127.第二、基于降低第一单元网格的后验概率p
后验
,基于升高第二单元网格的后验概率p
后验
,修正每个证据因子在每个单元网格中的后验概率p
后验
,以获得修正后验概率p
修正后验
;
128.其中,α1和α2为基于log(s)-log(a)双对数图所获得的斜率的绝对值,α1>α2。
129.本实施例中,图8为基于降低第一单元网格的后验概率的后验概率图,以及图9为基于升高第二单元网格的后验概率的后验概率图。
130.例如,以全月划分为72*144的方格为例,计算出单元网格中撞击坑个数最多为17个,最少为0个。撞击坑数等于0的单元格概率升高,单元格中撞击坑数大于阈值的单元格概率降低,获取这些情况所在单元网格的索引值,进而相应改变计算的后验概率p
后验
。
131.s5、通过对所述修正后验概率p
修正后验
进行颜色渲染,获得后验概率图,将所述后验概率图与专家筛选图层、撞击坑数据库进行结合,进行全月着陆区的选址;
132.基于步骤s5,在一种可能的实现过程中,为了使结果更加直观,将计算所得的修正后验概率p
修正后验
进行颜色渲染,具体为:对附图进行蓝色渲染,以获得后验概率图,后验概率图中蓝色越深表明越适宜着陆。
133.例如,图8和图9为后验概率图与专家筛选图层、撞击坑数据库相叠加的结果,可以比较明显地看出专家筛选出的预选着陆点主要分布在修正后验概率较高的单元网格中,且后验概率较高的区域撞击坑分布复杂度相对较低。
134.通过实施例二所述的方法进行着陆区选址改变了以往专家根据科学需求在工程约束条件下人工确定适宜着陆地区的传统方式,大大减少了工作量和人为因素干预且不需要大量的专业知识就能较好的圈定着陆范围,对月球探测任务中着陆区选址具有借鉴意义。
135.应当注意的是,在权利要求中,不应将位于括号之间的任何附图标记理解成对权利要求的限制。词语“包含”不排除存在未列在权利要求中的部件或步骤。位于部件之前的词语“一”或“一个”不排除存在多个这样的部件。此外,需要说明的是,在本说明书的描述
中,术语“一个实施例”、“一些实施例”、“实施例”、“示例”、“具体示例”或“一些示例”等的描述,是指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。
136.尽管已描述了本发明的优选实施例,但本领域的技术人员在得知了基本创造性概念后,则可对这些实施例做出另外的变更和修改。所以,权利要求应该解释为包括优选实施例以及落入本发明范围的所有变更和修改。
137.显然,本领域的技术人员可以对本发明进行各种修改和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也应该包含这些修改和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1