一种船载测控设备遮挡余量实时计算及二维显示方法与流程
1.本发明涉及航天测量工况设计领域,涉及一种船载天线设备遮挡余量实时计算及二维显示方法,该方法通过实时获取船载天线设备的方位、俯仰等信息,结合航向信息,实时计算和显示天线设备的遮挡余量,为判断各天线跟踪时是否被遮挡提供决策信息。
背景技术:
2.海上活动测控平台是船舶与特装系统包括测控、通信设备的有机结合。各种大型试验设备沿平台艏艉线密集架设,电磁信号容易受到相互之间天线外罩以及烟囱、船桅、桥楼等船体建筑的遮挡和反射,影响信号强度,产生干扰,进而影响测量精度。为保证设备性能,航天测控任务在设计时,根据目标理论飞行轨迹,合理规划船位和天线指向,避开遮挡区域。如果任务海域受限,或者目标仰角过低、机动范围过大等原因,遮挡问题不可避免,需研究遮挡预报模型,在任务实施过程中,实时计算和监视遮挡余量,采取变航向等应对措施,保持目标全程通视和通信畅通,从而保证弧段任务顺利完成。
3.遮挡余量的含义:遮挡面积同遮挡物的位置、高度、宽度以及二者几何关系等因素相关,可表示为遮挡函数。假设遮挡物处于静止状态,从被遮挡设备的视角看,遮挡阴影在被遮挡设备的方位角和俯仰角满足一定关系时才会出现,因此可将遮挡关系看作关于方位角x和俯仰角y的函数。遮挡余量的含义是:在当前俯仰角下,当前方位指向与最近的阴影边缘的距离(单位为
°
)。当遮挡余量为负时,表示落入阴影区;当遮挡余量取值为最大值360
°
时,表示360
°
方向都无遮挡。
4.图1示意了一个典型的天线遮挡方位图,其中的遮挡区域描述方式示意如下:
5.(1)方位角在(20
°
~160
°
、-20
°
~-160
°
)范围内,仰角>-5
°
无遮挡。
6.(2)方位角在0~
±
20
°
范围内,仰角>33
°
无遮挡。
7.(3)方位角在(160
°
~200
°
)范围内,仰角>24
°
无遮挡。
8.为了避免遮挡,应尽量保持或者增大遮挡余量。增大遮挡余量有两种策略:一是提高俯仰角,二是改变方位指向。对于第一种策略,在保持对目标跟踪的前提下,理论上可通过船体倾斜来增大俯仰角的值,但这种方法可操作性不强,在海浪环境下维持倾斜动作也比较困难;对于第二种策略,利用船体转向可实现天线方位角的平移,这种方法容易操作,且航向变化的角速度和航向变化范围都相对可控,因此对于存在遮挡风险的任务,一般采取变航向测量的策略来应对。
9.变航向测量的要素包括起始时刻、转向方向、转向角速度、转向范围。这4个要素都同遮挡余量密切相关,要准确控制这4个要素,实现遮挡规避,就需要实时计算、监视、预测遮挡余量。
技术实现要素:
10.本发明所要解决的技术问题是针对上述现有技术提供了一种船载天线设备遮挡余量实时计算及二维显示方法,该方法可用于多个船载天线设备遮挡余量的实时计算和显
示。本发明采用时间驱动的方式实时计算设备遮挡余量,计算频率为1hz。
11.本发明解决上述问题所采用的技术方案为:一种船载天线设备遮挡余量实时计算及二维显示方法,所述方法包括以下步骤:
12.步骤a、数据库设计:包括相互关联的《天线遮挡区域描述表》、《天线设备标识表》、《船姿船位数据表》;按照一定顺序和规则读取数据库表,对数据库表中的数据进行合法性检查;
13.步骤b、显示画面设计:包括整体视图和分设备视图,两者互为补充,整体视图用于实时观察航向与各设备方位角、俯仰角以及遮挡余量的联动变化,可以直观得出船舶转向是否合理的结论;分设备视图用于全程监视测控弧段内该设备是否落入和绕开了阴影区域;
14.步骤c、遮挡余量计算:(1)采用俯视投影坐标系,绘制出单台设备的遮挡区域以及设备指向轴的投影曲线;(2)采用360
°
表盘绘制设备的方位角,从表盘中心引出的方位指示线指示设备的实际方位角,该指示线的径向长度指示设备的实际俯仰角; (3)表盘的径向方向表示俯仰角,从圆盘中心往外,俯仰角逐渐变大,0
°
俯仰角在径向长度的1/2处;
15.步骤d、数据二维显示:将接收到的数据进行时标整理和对齐,在整秒点统一计算各设备的遮挡余量并在整体视图和分视图上实时显示;若遮挡余量过小或有变为负的趋势,将在界面上提示报警并给出转向建议。
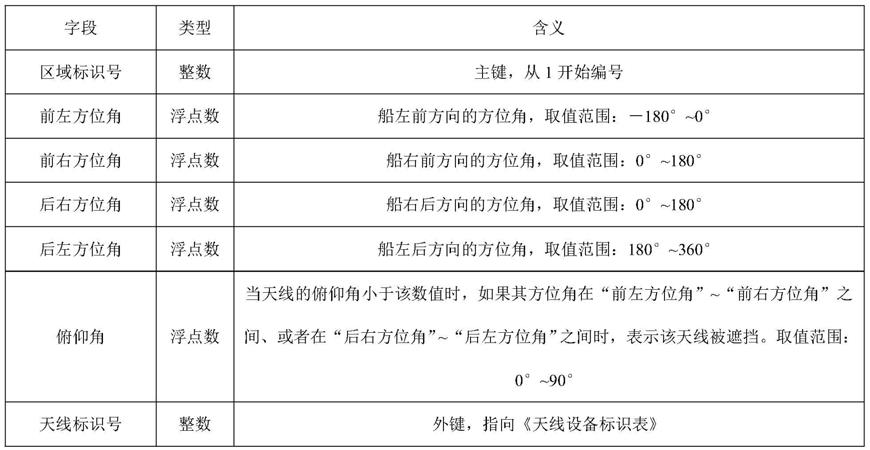
16.优选地,所述《天线遮挡区域描述表》包括7个字段,字段“区域标识号”为主键,每个遮挡区域均配置一个标识号,同一副天线可有多个“区域标识号”,这几个区域共同组成该天线的遮挡区域;每个遮挡区域由字段“前左方位角”、“前右方位角”、“后右方位角”、“后左方位角”、“俯仰角”共同组成,字段“天线标识号”为外键,用于指向《天线设备标识表》;
17.所述《天线设备标识表》存储测量平台天线设备的基础信息,包括天线标识号、天线名称、天线数据标识码、是否计算和船姿船位标识号,其中字段“天线数据标识码”用于从网络数据中识别出该天线的方位、俯仰数据;字段“船姿船位标识号”为外键,指向《船姿船位数据表》,用于指定该天线配套的船姿船位设备;
18.所述《船姿船位数据表》,存储船姿船位设备的基础信息,当存在多套船姿船位测量设备,实际计算时选用其中一套测量设备的数据,包括作为主键的“船姿船位标识号”,“船姿船位设备名称”和“船姿船位设备标识码”。
19.优选地,步骤a具体包括1)按“天线标识号”分类读取《天线遮挡区域描述表》,读取时同时按照俯仰角从小到大排序,生成每副天线的遮挡区域数组,形成如下形式的数据:{天线标识号,[前左方位角、前右方位角、后右方位角、后左方位角、俯仰角]
+
},其中的“+”号表示该数据有多组;
[0020]
2)按“天线标识号”从小到大排序读取《天线设备标识表》,把其中的“天线数据标识码”从十六进制转换为十进制;根据其中的“船姿船位标识号”,从《船姿船位数据表》中读取对应的记录,把“船姿船位设备标识码”与该“天线标识号”相关联;
[0021]
优选地,方位角的大小关系为:
[0022]
前左方位角≤前右方位角≤后右方位角≤后左方位角。
[0023]
优选地,所述步骤b中的整体视图包括统计《天线设备标识表》中字段“是否计算”为true的记录个数,按照“天线标识号”从小到大的顺序,在视图的左部分依次绘制各设备
的遮挡余量简图;视图的右部分依次显示测量平台的航向信息,各设备的方位数据、俯仰数据以及遮挡余量数据。
[0024]
优选地,所述步骤b中的分设备视图数量与整体视图中的遮挡余量简图个数一致,每个分设备视图仅设备数据和遮挡数据不同,显示方式完全一致,根据《天线遮挡区域描述表》中该设备的数据,采用俯视投影坐标系,绘制出单台设备的遮挡区域以及设备指向轴的投影曲线;绘制360
°
表盘以表达设备的方位角,从表盘中心引出的方位指示线指示设备的实际方位角,该指示线的径向长度指示设备的实际俯仰角,初始化时为0
ꢀ°
;绘制表盘的径向刻度,以表达设备的俯仰角,在径向长度的1/2处绘制0
°
俯仰角的基准圆。
[0025]
优选地,在船测控数据业务网络上,按照通信协议网收两类数据:
①
测控设备的原始测量数据,从中提取设备在甲板系下的方位角和俯仰角值;
②
惯导设备的船姿船位数据,获得当前船位、航向和航速信息。
[0026]
与现有技术相比,本发明的优点在于:
[0027]
1、本发明设计的船载测控设备遮挡余量实时显示视图,其中整体视图可实时观察航向与各设备方位角、俯仰角以及遮挡余量的联动变化,据此可以直观得出船舶转向是否合理的结论;分设备视图用于全程监视测控弧段内该设备是否落入和绕开了阴影区域,据此可以直观判断分设备是否进入遮挡区。
[0028]
2、本发明设计的《天线遮挡区域描述表》、《天线设备标识表》、和《船姿船位数据表》,实现了天线遮挡数据的可配置性、天线设备数据显示的可选择性以及船姿船位数据源的可选择性,适用于各船不同设备,适用性强。
附图说明
[0029]
图1是本发明涉及的遮挡关系示意图。图中横坐标x为方位角,纵坐标y为俯仰角,均采用甲板坐标系,其中方位角x为[0
°
,360
°
],俯仰角y为[0
°
,90
°
]。图中显示,当方位角在[0
°
,20
°
]、俯仰角《=33
°
时有遮挡;方位角在[160
°
,200
°
]、俯仰角《=24
°
时有遮挡;方位角在[340
°
,360
°
]、俯仰角《=33
°
时有遮挡;其余区域无遮挡。对于测量平台上的设备来说,遮挡阴影一般出现在船艏艉线上,即分布于x=0和x=180 两侧。
[0030]
图2是本发明设计的卫星遮挡角实时显示的整体视图。图中采用360
°
表盘绘制船舶航向,表盘中心的航向指示线指示船舶的实际航向;在航向指示线上依次绘制了各设备的遮挡余量简图,每副简图上都绘制了遮挡情况以及设备的方位指向,据此容易知道各设备遮挡的整体情况,即简图中方位指向进入阴影部分时该设备被遮挡;视图的右部分依次显示测量平台的航向信息,各设备的方位数据、俯仰数据以及遮挡余量数据,其中遮挡余量数据显示颜色为红色时表示该设备被遮挡。
[0031]
图3是本发明设计的卫星遮挡角实时显示的分视图。图中采用俯视投影坐标系,绘制出单台设备的遮挡区域以及设备指向轴的投影曲线;采用360
°
表盘绘制设备的方位角,从表盘中心引出的方位指示线指示设备的实际方位角,该指示线的径向长度指示设备的实际俯仰角;表盘的径向方向表示俯仰角,从圆盘中心往外,俯仰角逐渐变大,0
°
俯仰角在径向长度的1/2处。
具体实施方式
[0032]
以下结合附图实施例对本发明作进一步详细描述。
[0033]
一种船载天线设备遮挡余量实时计算及二维显示方法。该方法包括以下步骤:
[0034]
步骤a,数据库设计。本发明设计了3种数据库表:《天线遮挡区域描述表》、《天线设备标识表》、《船姿船位数据表》。
[0035]
步骤a.1,设计《天线遮挡区域描述表》,存储天线遮挡区域的方位、俯仰信息。字段“天线标识号”为外键,指向《天线设备标识表》;方位角指甲板系下与正北方向的夹角,顺时针为正,逆时针为负。
[0036]
表1 天线遮挡区域描述表
[0037][0038]
步骤a.2,设计《天线设备标识表》,存储测量平台天线设备的基础信息,包括天线标识号、天线名称、天线数据标识码等。字段“天线数据标识码”用于从网络数据中识别出该天线的方位、俯仰数据;字段“船姿船位标识号”为外键,指向《船姿船位数据表》,用于指定该天线配套的船姿船位设备。
[0039]
表2 天线设备标识表
[0040][0041][0042]
步骤a.3,设计《船姿船位数据表》,存储船姿船位设备的基础信息。当存在多套船姿船位测量设备,实际计算时应当选用其中一套测量设备的数据。
[0043]
表3 船姿船位数据表
[0044]
字段类型含义
船姿船位标识号整数主键,从1开始编号船姿船位设备名称字符串该天线的中文名称船姿船位设备标识码十六进制整数以0x开头的十六进制整数,用于从网络上识别船姿船位数据
[0045]
步骤b,显示画面设计。采用整体视图+分设备视图方式设计显示画面,整体视图中设备数量、分视图个数与用户配置的《天线设备标识表》密切相关,其值与该表中“是否计算”字段值为“是”的数量一致。
[0046]
步骤b.1,整体视图设计。整体视图将船舶航向和各设备绘制在一个表盘上,用户可实时观察航向与设备方位角、俯仰角以及遮挡余量的联动变化,可以直观得出船舶转向结论,如图2所示;
[0047]
步骤b.2,分设备视图设计。分设备视图采用俯视投影坐标系,绘制出单台设备的遮挡区域以及设备指向轴的投影曲线,用户可全程监视在任务时段中设备是否落入和绕开了阴影区域,图3显示了脉雷设备的遮挡区域,以及一次侧向测量的过程。
[0048]
步骤c,遮挡余量计算算法设计。本算法基于《天线遮挡区域描述表》中的遮挡数据,假设某天线的遮挡数组为[前左方位角、前右方位角、后右方位角、后左方位角、俯仰角],且已按俯仰角从大到小排序,其中第i个元素计为sheltarray[i]。假设当前设备的方位角为azimangle,仰角为eleangle。那么,遮挡余量计算算法为:
[0049]
步骤c.1,如果eleangle大于sheltarray[0]元素中的俯仰角,那么说明该设备无遮挡,即遮挡余量为360
°
,遮挡余量计算结束,否则执行步骤c.2。
[0050]
步骤c.2,查找eleangle在遮挡数组中的位置,即查找满足
[0051]“sheltarray[i].俯仰角》=eleangle》sheltarray[i+1].俯仰角”[0052]
的数据元素。如果查找成功,那么记录sheltarray[i]中的遮挡角数据,执行步骤 c.3;如果查找失败,那么使用sheltarray[]数组中最后一个数据元素的遮挡角数据。
[0053]
步骤c.3,根据sheltarray[i]中的遮挡方位角数据,分类计算遮挡余量。首先需要把“前左方位角”的值转换到0~360
°
之间,即如果“前左方位角《0”,那么“前左方位角+=360”,然后执行如下操作:
[0054]
(1)如果遮挡角数据中“前左方位角==前右方位角”,而“后左方位角!=后右方位角”,说明该设备仅在后方有遮挡,那么仅需判断后方遮挡情况,即:
[0055]
①
如果“eleangle《后右方位角”,那么遮挡余量值为“后右方位角-eleangle”,该值为正,目标位于右方空白区,无遮挡;
[0056]
②
如果“后右方位角《=eleangle《=后左方位角”,那么遮挡余量值为“后右方位角-eleangle”和“eleangle-后左方位角”中的较大值,该值为负,目标位于后方遮挡区;
[0057]
③
如果“eleangle》后左方位角”,那么遮挡余量值为“eleangle-后左方位角”,该值为正,目标位于后方空白区。
[0058]
(2)如果遮挡角数据中“前左方位角!=前右方位角”,而“后左方位角==后右方位角”,说明该设备仅在前方有遮挡,那么仅需判断前方遮挡情况,即:
[0059]
①
如果“eleangle《=前右方位角”,那么遮挡余量值为“eleangle
–
前右方位角”,该值为负,目标位于右前方遮挡区;
[0060]
②
如果“前右方位角《eleangle《前左方位角”,那么遮挡余量值为“eleangle
–
前右方位角”和“前左方位角-eleangle”中的较小值,该值为正,目标位于空白区;
[0061]
③
如果“eleangle》前左方位角”,那么遮挡余量值为“前左方位角
–
eleangle”,该值为负,目标位于左前方遮挡区。
[0062]
(3)如果遮挡角数据中“前左方位角!=前右方位角”,且“后左方位角!=后右方位角”,说明该设备在前后方均有遮挡,那么需同时判断前后方遮挡情况,即:
[0063]
①
如果“eleangle《=前右方位角”,那么遮挡余量值为“eleangle
–
前右方位角”,该值为负,目标位于右前方遮挡区;
[0064]
②
如果“前右方位角《eleangle《后右方位角”,那么遮挡余量值为“eleangle
–
前右方位角”和“后右方位角-eleangle”中的较小值,该值为正,目标位于空白区;
[0065]
③
如果“后右方位角《=eleangle《=后左方位角”,那么遮挡余量值为“后右方位角-eleangle”和“eleangle-后左方位角”中的较大值,该值为负,目标位于后方遮挡区;
[0066]
④
如果“后左方位角《eleangle《前左方位角”,那么遮挡余量值为“eleangle
–
后左方位角”和“前左方位角-eleangle”中的较小值,该值为正,目标位于空白区;
[0067]
⑤
如果“eleangle》=前左方位角”,那么遮挡余量值为“前左方位角
–
eleangle”,该值为负,目标位于左前方遮挡区。
[0068]
除上述实施例外,本发明还包括有其他实施方式,凡采用等同变换或者等效替换方式形成的技术方案,均应落入本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1