一种自识别清洗装置的制作方法
1.本实用新型涉及一种清洗机技术领域,具体涉及一种能够自动识别待清洗物的自识别清洗装置。
背景技术:
2.现有技术中的清洗机不仅能够进行餐具的清洗,也可以用于进行果蔬、海鲜等食物的清洗,特别在进行食物清洗时,由于不同的食物其性质差异较大,对应的清洗参数也相差较大。用户在使用时,需要根据放入的食物性质来调整清洗机的清洗参数,而用户在调整参数时,又需要查看说明书进行调整,操作步骤复杂,使用体验差。
3.授权公告号为cn212630705u(申请号为202020898119.6)的中国实用新型专利《洗碗机》,其中公开的洗碗机中设置有摄像模组以及补光件,利用摄像模组能实现对洗碗机内胆中图像的采集,进而通过对图像的分析获取内胆中的放置餐具的信息,进而调整喷淋机构的工作参数。但是该洗碗机中的摄像模组和补光件均设置在内胆的内壁面上,工作时容易被污水污染,影响对图像的处理结果。并且内胆无法移动且远离用户能够靠近的位置,清理也不方便。另外,当摄像模组出现故障而拆卸下来进行维修时,会影响内胆的完整性,导致洗碗机无法进行清洗工作。
技术实现要素:
4.本实用新型所要解决的技术问题是针对上述现有技术提供一种污染概率小、方便进行清洁、不会影响清洗腔完整性、操作便捷的自识别清洗装置。
5.本实用新型解决上述技术问题所采用的技术方案为:一种自识别清洗装置,包括具有清洗腔的机体,能开合地覆盖在机体开口上的门板,其特征在于:所述门板内面向清洗腔设置有摄像头和光源,所述门板内还设置有电路板、控制模块,所述摄像头、光源、控制模块分别与电路板电信号连接,所述门板的内板面上对应于摄像头、光源分别开设有开孔,所述开孔内密封嵌设有透明盖。
6.为了方便将摄像头采集的图像数据发送至外部计算设备进行计算处理,进而提高图像的处理速度,所述门板内还设置有与控制模块电信号连接的无线通信模块。
7.优选地,所述门板包括相互对合的第一盖体和第二盖体,所述第一盖体和第二盖体之间形成有安装腔,所述摄像头、光源、电路板、控制模块均设置在安装腔内,所述开孔开设于第二盖体上。
8.为了避免水自开孔内进入到电路板上,所述电路板外罩设有盒体,所述摄像头、光源连接在电路板上且嵌设在盒体内。
9.为了方便安装摄像头和光源,所述盒体上对应于摄像头、光源分别开设有安装孔,所述盒体上沿各安装孔的周向分别设置有环壁,所述环壁延伸至对应的开孔内。
10.优选地,所述摄像头、光源设置在门板的中部。
11.为了使得光源照射的光线能够全面覆盖清洗腔,所述门板的内板面中部向远离清
洗腔的方向凹陷设置。
12.与现有技术相比,本实用新型的优点在于:本实用新型中的自识别清洗装置,通过摄像头可以实现对清洗腔内待清洗物进行图像采集,进而通过图像分析实现对待清洗物的有效识别,并根据识别结果自主调节清洗参数进行清洗,特别进行食物清洗时,更加方便快捷。另外,该自识别清洗装置将摄像头、光源设置在门板内,并利用透明盖进行保护,大大降低了摄像头、光源与清洗腔内水的接触几率,使用更加安全,使用寿命更长。即使摄像头、光源发生故障而自门板中拆卸出来维修时,清洗腔的完整性不会受到任何影响,清洗装置仍然能够进行清洗工作,清洗装置的清洗工作不会受到影响。
附图说明
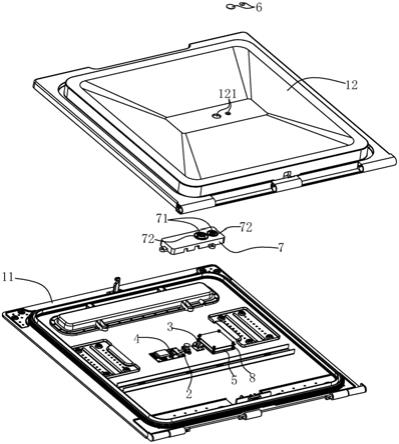
13.图1为本实用新型实施例中门板的立体图。
14.图2为图1的立体分解图。
15.图3为图1的剖视图。
16.图4为图3的部分放大图。
具体实施方式
17.以下结合附图实施例对本实用新型作进一步详细描述。
18.如图1至图4所示,本实施例中的自识别清洗装置,包括具有清洗腔的机体、能开合地覆盖在机体开口上的门板1、设置在门板1内的电路板4、控制模块5、摄像头2、光源3、无线通信模块8。
19.本实施例中的机体可以采用现有技术中的任意清洗机的机体结构,基于此,附图中未示出该机体的具体结构。
20.门板1包括相互对合的第一盖体11和第二盖体12,其中第一门板1位于远离清洗腔的一侧,第二门板1位于靠近清洗腔的一侧,第二盖体12作为门板1的内板面。第一盖体11和第二盖体12的边缘之间密封连接,如此在第一盖体11和第二盖体12之间形成有安装腔,摄像头2、光源3、电路板4、控制模块5均设置在安装腔内,并且摄像头2和光源3面向清洗腔的方向设置。第二盖体12上对应于摄像头2、光源3的设置位置分别开设有开孔121,各开孔121内密封嵌设有透明盖6以满足摄像头2的拍摄需求以及光源3的照射需求。为了保证透明盖6在开孔121内的密封连接,本实施例中的透明盖6采用台阶面的连接方式扣合在开孔121内,如此能够提高两者连接的密封性,同时在透明盖6与开孔121内周壁之间还设置密封件以增加两者之间连接的密封性。
21.为了能够更好、更全面的拍摄到清洗腔内的图像,同时保证在拍摄过程中清洗腔内良好的光线,本实施例中将摄像头2和光源3设置在门板1的中部,并且的内板面中部向远离清洗腔的方向凹陷设置,即第二盖体12的中部向远离清洗腔的方向凹陷设置,该中部的四周为倾斜面,如此光源3照射出的光线在该第二盖体12的作用下能够更全面、更均匀的照射在清洗腔内。本实施例中的光源3可以采用led灯。
22.电路板4上具有摄像头2、光源3的供电电路、驱动电路等电路,摄像头2、光源3与电路板4电信号连接,并且该电路板4还与控制模块5电信号连接,不仅接收控制模块5发送的控制信号,进而控制摄像头2、光源3进行工作,该电路板4还能够将摄像头2采集的图像数据
传送给控制模块5。控制模块5可以采用现有的cpu芯片。由于清洗装置中采用的控制模块5通常运算能力有限,本实施例中还设置了与控制模块5电信号连接的无线通信模块8,如可以采用wifi模块,通过该无线通信模块8能够将控制模块5获取的图像数据传送至外部的计算设备上,如可以传送至云服务器、外部计算终端等上进行计算,计算完的结果通过无线通信模块8传动给控制模块5,进而实现对清洗装置进行工作控制。
23.为了实现对电路板4的保护,尽可能避免清洗腔内水对电路板4的影响,在电路板4外罩设有盒体7,该盒体7可以通过固定在第一盖体11上而实现对电路板4的封罩。摄像头2、光源3连接在电路板4上且嵌设在盒体7内。具体地,盒体7上对应于摄像头2、光源3分别开设有安装孔71,盒体7上沿各安装孔71的周向分别设置有环壁72,环壁72延伸至门板1的内板面上。如此环壁72在盒体7的盒面与第二门板1之间围设形成供摄像头2和光源3置入的腔体,实现了对摄像头2和光源3的保护。
24.该自识别清洗装置在进行果蔬清洗时,通过前期清洗实验与图像采集,建立果蔬分类数据库,对每一种果蔬进行不同照明条件下的图像采集,为每一种果蔬建立独立的数据集。数据库搭建完成后,同时进行每一种果蔬的清洗实验,通过清洗实验得到每一种果蔬对应的最佳水量、转速以及清洗时间参数,进而形成最佳清洗时序。
25.前期实验过程中,通过采集图像构建数据集,然后将数据集传送至云服务器,在云服务器端对识别模型进行训练来提高图像识别的准确率,数据集越丰富,训练后模型越好其识别率也会更高。实际进行果蔬辨识时,将使用概率来衡量待辨识果蔬与数据集中的果蔬图像的相关性。
26.每台该自识别清洗装置出厂前,在门板1关闭状态下,打开光源3及摄像头2,对清洗腔进行图像采集,首先对图像进行去色处理,其次在图像上以图像宽度的1/6宽度间隔进行五次横向线扫描,统计五条扫描线上同一像素值的像素点数量,提取像素点数量前五的像素值并记录,在此处,为了避免设备老化、光线变化等带来的影响因素,将前五的每个像素值进行调整,调整范围为
±
w,w由研发设计人员通过实验制定。
27.该自识别清洗装置的智能果蔬清洗时序如下:
28.s1、清洗程序启动,依次打开光源3、摄像头2;
29.s2、对清洗腔内的果蔬图像进行整体采集;
30.s3、将采集得到的二维图像上传至云端服务器,将图像备份;
31.s4、将备份图像进行去色处理,以图像宽度的1/6的间隔宽度进行五次横向线扫描,提取每条扫描线上同一像素值的像素点数量,并提取像素点数量前五的像素值与出厂前采集的五个像素值进行对比;
32.s4.1没有变化,说明此时可能放入了果蔬,但是果蔬数量极少,转到s13;
33.s4.2前五个像素值中只有四个与出厂前采集的五个像素值相同,说明此时已放入了具备一定数量的一种果蔬,跳转至s5;
34.s4.3前五个像素值中有小于等于三个像素值与出厂前采集的五个像素值相同,说明此时已放入了一种以上的具备一定数量的果蔬,跳转至s13;
35.s5、判断其是否属于已采集的一种果蔬;
36.s5.1分析完成后,概率最高值大于60%,转到s6;
37.s5.2分析完成后,概率最高值小于60%,则此时有一定可能发生误识别,转到s7;
38.s6、取概率最高值所对应的果蔬种类,记为f并存储,调出f对应果蔬单位面积m,转到s8;
39.s7、为避免误识别引起的时序选择错误造成果蔬洗坏的问题,选取排第一和第二高的概率值,找到所对应的果蔬种类,记为f1、f2并存储,分别调出f1、f2对应果蔬单位面积m1、m2,转到s9;
40.s8、对图像进行图像分割,消除果蔬篮及背景的影响,将果蔬部分的图像分离出来并计算该部分的总面积,记为sal,将总面积sal除以对应果蔬单位面积m,即得到果蔬的近似数量,记为n,转到s10;
41.s9、对图像进行图像分割,消除果蔬篮及背景的影响,将果蔬部分的图像分离出来并计算该部分的总面积,记为sal,将总面积sal分别除以对应果蔬单位面积m1、m2,得到的数量分别记为n1,n2,转到11;
42.s10、将云端计算结果,果蔬种类f与果蔬数量n下载到本地,索引得到对应的清洗时序t;
43.s11、将云端计算结果,果蔬种类f1、f与果蔬数量n1,n2下载到本地,索引得到对应的清洗时序t1、t2,接上文所述为避免果蔬洗坏的问题,取两个时序中水量较高的作为最终的清洗时序tfina;
44.s12、开始清洗;
45.s13、启动设定的标准洗程序;
46.s14、结束清洗过程。
47.本实用新型中的自识别清洗装置,通过摄像头2可以实现对清洗腔内待清洗物进行图像采集,进而通过图像分析实现对待清洗物的有效识别,并根据识别结果自主调节清洗参数进行清洗,特别进行食物清洗时,用户无需进行对应食物清洗参数的选择,使用更加方便快捷,清洗效果佳。另外,该自识别清洗装置将摄像头2、光源3设置在门板1内,并利用透明盖6进行保护,大大降低了摄像头2、光源3与清洗腔内水的接触几率,使用更加安全,使用寿命更长。即使摄像头2、光源3发生故障而自门板1中拆卸出来维修时,清洗腔的完整性不会受到任何影响,清洗装置仍然能够进行清洗工作,清洗装置的清洗工作不会受到影响。并且由于摄像头2、光源3安装在门板1上,特别该自识别清洗装置为水槽式清洗装置时吗,摄像头2、光源3碰触到清洗过程中油污的几率较小,摄像头2、光源3被污染的几率小,在透明盖6保护小接触油污的几率更小,并且,即使透明盖6被油污污染,用户也方便打开门板1进行清理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1