一种机器人系统的制作方法
1.本实用新型涉及一种机器人系统。
背景技术:
2.随着机器人系统技术的不断发展,机器人系统的功能日益强大,能够满足各种复杂的应用需求。然而,由于现有机器人系统的音频载荷装置和视频载荷装置无法快速准确地与外界进行有效交互,因此降低了工作效率,使得机器人系统无法及时有效地完成工作任务。同时,由于机器人系统的内部构造日益复杂,因此导致机器人系统内部的空间比较拥挤,无法进行及时散热。
技术实现要素:
3.针对上述问题,本实用新型的目的是提供一种机器人系统,其能够快速准确地与外界进行有效交互,同时能够及时散热且散热效率高。
4.本实用新型提出了一种机器人系统,包括机器人本体、四个翻转器、音视频集成装置和散热装置;其中,两个所述翻转器间隔设置在所述机器人本体的前部两侧,另外两个所述翻转器间隔设置在所述机器人本体的后部两侧,每一个所述翻转器均包括第一皮带轮和第二皮带轮,所述第一皮带轮和所述第二皮带轮之间设置有翻转器臂,所述机器人本体通过履带连接各所述第一皮带轮和各所述第二皮带轮,所述音视频集成装置包括设置在所述机器人本体前端的面板盖,所述面板盖上间隔设置有麦克风、扬声器、显示屏和摄像机,所述散热装置包括设置在所述机器人本体侧部的第一散热器和设置在所述机器人本体后部的第二散热器。
5.在一个具体实施例中,所述显示屏为发光二极管屏幕、有机发光二极管屏幕或电子墨水屏幕。
6.在一个具体实施例中,所述面板盖上间隔设置有两个照明灯。
7.在一个具体实施例中,所述面板盖上设置有穿孔。
8.在一个具体实施例中,所述穿孔包括激光器穿孔、红外灯穿孔、化学传感器穿孔、压力传感器穿孔、扫描激光传感器穿孔和/或扫掠激光灯穿孔,所述机器人本体中对应设置有激光器、红外灯、化学传感器、压力传感器、扫描激光传感器和/或扫掠激光灯,且所述激光器穿孔、所述红外灯穿孔、所述化学传感器穿孔、所述压力传感器穿孔、所述扫描激光传感器穿孔和/或所述扫掠激光灯穿孔对应设置在所述激光器、所述红外灯、所述化学传感器、所述压力传感器、所述扫描激光传感器和/或所述扫掠激光灯的前方。
9.在一个具体实施例中,所述穿孔的数目为多个,所述多个穿孔呈间隔设置。
10.在一个具体实施例中,所述机器人本体的侧部设置有第一散热器盖,所述第一散热器盖覆盖所述第一散热器。
11.在一个具体实施例中,所述第一散热器的数目为两个,所述两个第一散热器分别布置在所述机器人本体的左右两侧。
12.在一个具体实施例中,所述机器人本体的后端设置有第二散热器盖,所述第二散热器盖覆盖所述第二散热器。
13.在一个具体实施例中,所述第一皮带轮上背离所述机器人本体侧的位置设置有第一皮带轮盖,所述第一皮带轮盖的直径大于所述第一皮带轮的直径,所述第二皮带轮上背离所述机器人本体侧的位置设置有第二皮带轮盖,所述第二皮带轮盖的直径大于所述第二皮带轮的直径。
14.本实用新型由于采取以上技术方案,其具有以下优点:
15.1、本实用新型能够快速准确地与外界进行有效交互,从而能够提高机器人系统的工作效率。
16.2、本实用新型能够及时散热且散热效率高,散热效果好,从而能够及时有效地降低机器人本体和有效载荷装置内部的温度,防止机器人系统发生故障,延长机器人系统的使用寿命。
17.3、本实用新型能够防止履带松脱,安全性好。
18.4、本实用新型结构简单,使用方便,适用范围广,市场前景广阔。
19.本实用新型的其它特征和优点将在随后的说明书中阐述,并且部分的从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
20.为了更清楚的说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要的附图做简单的介绍:
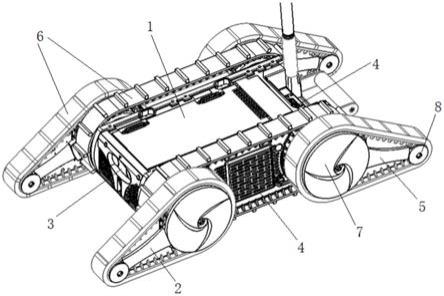
21.图1示出了本实用新型的机器人系统的一个具体实施例的结构示意图;
22.图2示出了本实用新型的机器人系统的一个具体实施例的机器人本体前端设置音视频集成装置的结构示意图;
23.图3示出了本实用新型的机器人系统的一个具体实施例的机器人本体侧部设置第一散热器盖的结构示意图;
24.图4示出了本实用新型的机器人系统的一个具体实施例的机器人本体后端设置第二散热器盖的结构示意图。
具体实施方式
25.以下将结合附图及实施例来详细说明本实用新型的实施方式,借此对本实用新型如何应用技术手段来解决技术问题,并达成技术效果的实现过程能充分理解并据以实施。需要说明的是,只要不构成冲突,本实用新型中的各个实施例以及各实施例中的各个特征可以相互结合,所形成的技术方案均在本实用新型的保护范围之内。本实用新型所提到的方向用语例如「前」、「后」、「内」和「外」,仅是参考附加图式的方式。因此,使用的方向用语是用以说明及理解本实用新型,而非用以限制本实用新型。
26.如图1所示,本实用新型提出的机器人系统,包括机器人本体1、四个翻转器2、音视频集成装置3和散热装置4。其中,两个翻转器2间隔设置在机器人本体1的前部两侧。另外两个翻转器2间隔设置在机器人本体1的后部两侧。每一个翻转器2均包括第一皮带轮和第二
皮带轮。第一皮带轮和第二皮带轮之间设置有翻转器臂5。机器人本体1通过履带6连接各第一皮带轮和各第二皮带轮。音视频集成装置3包括设置在机器人本体1前端的面板盖31,面板盖31上间隔设置有麦克风32、扬声器33、显示屏和摄像机34。例如,显示屏能够在递送医疗用品时显示红十字符号,和/或显示操作员的脸,使得机器人系统遇到的对象能够快速准确地识别操作员。同时,显示屏能够用于与远程操作员控制装置进行视频聊天。摄像机34能够全面准确地获取外界图像信息。音视频集成装置3使得机器人系统能够快速准确地与外界进行有效交互。散热装置4包括设置在机器人本体1侧部的第一散热器和设置在机器人本体1后部的第二散热器,使得机器人系统能够及时散热且散热效率高,散热效果好。
27.在一个具体的实施例中,显示屏为发光二极管屏幕、有机发光二极管屏幕或电子墨水屏幕,能够更好的显示图像、文本和/或虚拟脸。
28.在一个具体实施例中,如图2所示,面板盖31上间隔设置有两个照明灯35,能够便于机器人系统在光线暗的场景下工作,照明效果好。
29.在一个具体的实施例中,麦克风32和扬声器33分别通过胶体和/或紧固件与面板盖1连接。
30.在一个具体的实施例中,麦克风32为驻极体麦克风、激光麦克风、压电麦克风、凝胶麦克风、隔膜麦克风、振动检测麦克风、抛物线麦克风或猎枪麦克风。
31.在一个具体的实施例中,如图2所示,面板盖31上设置有穿孔36。穿孔36包括激光器穿孔、红外灯穿孔、化学传感器穿孔、压力传感器穿孔、扫描激光传感器穿孔和/或扫掠激光灯(例如用于脸部扫描、房间扫描、指纹扫描和/或足迹扫描)穿孔。其中,机器人本体1中对应设置有激光器、红外灯、化学传感器、压力传感器、扫描激光传感器和/或扫掠激光灯。并且,激光器穿孔、红外灯穿孔、化学传感器穿孔、压力传感器穿孔、扫描激光传感器穿孔和/或扫掠激光灯穿孔对应设置在激光器、红外灯、化学传感器、压力传感器、扫描激光传感器和/或扫掠激光灯的前方,能够无障碍地进行通信。
32.在一个具体的实施例中,如图2所示,穿孔36的数目为多个。多个穿孔36呈间隔设置。
33.在一个具体的实施例中,面板盖1采用聚碳酸酯和/或晶体制成。
34.在一个具体的实施例中,如图1、图3所示,机器人本体1的侧部设置有第一散热器盖11,第一散热器盖11覆盖第一散热器,能够保护第一散热器免受损坏。
35.在一个具体的实施例中,第一散热器的数目为两个,两个第一散热器分别布置在机器人本体1的左右两侧,能够进一步提高散热效率和散热效果。
36.在一个具体的实施例中,如图1、图4所示,机器人本体1的后端设置有第二散热器盖12,第二散热器盖12覆盖第二散热器,能够保护第二散热器免受损坏。
37.在一个具体的实施例中,如图1所示,第一皮带轮上背离机器人本体1侧的位置设置有第一皮带轮盖7,第一皮带轮盖7的直径大于第一皮带轮的直径。第二皮带轮上背离机器人本体1侧的位置设置有第二皮带轮盖8,第二皮带轮盖8的直径大于第二皮带轮的直径。这样,能够侧向保持履带6,防止履带6在恶劣(如脏乱、充满碎屑)环境中且重负载下执行零转弯半径操作时松脱。
38.虽然本实用新型所公开的实施方式如上,但所述的内容只是为了便于理解本实用新型而采用的实施方式,并非用以限定本实用新型。任何本实用新型所属技术领域内的技
术人员,在不脱离本实用新型所公开的精神和范围的前提下,可以在实施的形式上及细节上作任何的修改与变化,但本实用新型的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1