图像处理装置、图像处理方法及图像处理程序与流程
1.本发明涉及处理拍摄建筑物所得的图像、建筑物的三维模型及损伤信息的技术。
背景技术:
2.关于处理建筑物的三维模型及损伤信息的技术,例如在专利文献1中记载了通过三维激光扫描仪获取隧道施工内表面的三维点云数据,并使用该数据生成表示形变的施工展开图的技术。
3.以往技术文献
4.专利文献
5.专利文献1:日本特开2019-020348号公报
技术实现要素:
6.发明要解决的技术课题
7.然而,在上述的专利文献1所记载的技术中,由于使用激光扫描仪,因此无法获取被摄体的图像数据,点云的分辨率也低。因此,无法有效地处理拍摄建筑物所得的图像、建筑物的三维模型及损伤信息。
8.本发明是鉴于这种情况而完成的,本公开的技术所涉及的一实施方式提供一种能够有效地处理拍摄建筑物所得的图像、建筑物的三维模型及损伤信息的图像处理装置、图像处理方法及图像处理程序。
9.用于解决技术课题的手段
10.本发明的第一方式所涉及的图像处理装置具备:处理器;以及存储器,其将拍摄建筑物所得的多个图像和建筑物的三维模型建立对应地存储,其中,处理器进行:展开处理,将三维模型展开为二维图像;提取处理,基于多个图像提取建筑物的损伤信息;映射处理,将损伤信息映射到二维图像上;以及输出处理,输出进行了映射的二维图像。
11.第二方式所涉及的图像处理装置在第一方式中,处理器进行:生成处理,基于多个图像生成建筑物的三维模型;以及存储控制处理,将三维模型与多个图像建立对应地存储到存储器中。
12.第三方式所涉及的图像处理装置在第二方式中,处理器将生成的三维模型中被指定的区域作为同一面来重构三维模型。
13.第四方式所涉及的图像处理装置在第一至第三方式中的任一项中,处理器沿着构成三维模型的面的边缘中被指定的边缘进行展开。
14.第五方式所涉及的图像处理装置在第四方式中,处理器接受进行展开时的边缘的指定。
15.第六方式所涉及的图像处理装置在第一至第五方式中的任一项中,处理器将三维模型中被指定的区域分割成所指定的大小的平面来进行展开。
16.第七方式所涉及的图像处理装置在第一至第六方式中的任一项中,处理器在展开
中使构成二维图像的区域的法线方向一致。
17.第八方式所涉及的图像处理装置在第一至第七方式中的任一项中,处理器对三维模型中被指定的部分进行展开。
18.第九方式所涉及的图像处理装置在第一至第八方式中的任一项中,处理器生成三维点云模型、三维网格模型、三维表面模型及三维实体模型中的至少一个来作为三维模型。
19.第十方式所涉及的图像处理装置在第一至第九方式中的任一项中,处理器生成三维点云模型来作为三维模型,基于三维点云模型来生成作为三维模型的三维网格模型、三维表面模型及三维实体模型中的至少一个。
20.第十一方式所涉及的图像处理装置在第一至第十方式中的任一项中,处理器生成基于多个图像的合成图像,并将合成图像映射到二维图像上。
21.第十二方式所涉及的图像处理装置在第十一方式中,处理器通过使特征点在多个图像间一致或者通过将多个图像投影到同一平面上而生成合成图像。
22.第十三方式所涉及的图像处理装置在第一至第十二方式中,处理器进行:获取处理,获取拍摄建筑物所得的多个图像、即拍摄日期时间与存储在存储器中的多个图像不同的多个图像;以及对应建立处理,将获取的多个图像与存储在存储器中的三维模型建立对应。
23.第十四方式所涉及的图像处理装置在第十三方式中,处理器基于获取的多个图像与存储在存储器中的多个图像的相关进行对应建立处理。
24.本发明的第十五方式所涉及的图像处理方法是由图像处理装置执行的图像处理方法,所述图像处理装置具备:处理器;以及存储器,其将拍摄建筑物所得的多个图像和建筑物的三维模型建立对应地存储,其中,处理器进行的处理包括:展开工序,将三维模型展开为二维图像;提取工序,基于多个图像提取建筑物的损伤信息;映射工序,将损伤信息映射到前维图像上;以及输出工序,输出进行了映射的二维图像。第十五方式所涉及的图像处理方法也可以进一步具有与第二至第十四方式同样的结构。
25.本发明的第十六方式所涉及的图像处理程序使计算机执行第十五方式所涉及的图像处理方法。记录了第十六方式所涉及的图像处理程序的计算机可读取的代码的非暂时性记录介质也可作为本发明的方式举出。
26.发明效果
27.如上所述,根据本发明的图像处理装置、图像处理方法及图像处理程序,用户能够有效地处理拍摄建筑物所得的图像、建筑物的三维模型及损伤信息。
附图说明
28.图1是表示第一实施方式的图像处理系统的概略结构的图。
29.图2是表示处理部的功能结构的图。
30.图3是表示存储在存储装置中的信息的图。
31.图4是表示图像处理方法的处理的流程图。
32.图5是表示获取图像组的情形的图。
33.图6是表示损伤信息的例子的图。
34.图7是表示三维模型的例子的图。
35.图8是表示设定三维模型的展开条件的情形的图。
36.图9是表示将三维模型展开为二维图像的情形的图。
37.图10是表示从左侧面侧观察腿部的情形的图。
38.图11是表示使法线方向一致的二维展开的情形的图。
39.图12是表示以指定宽度的网格进行二维展开的情形的图。
40.图13是表示以指定宽度的网格进行二维展开的情形的另一图。
41.图14是表示在三维点云数据中指定边缘的情形的图。
42.图15是表示生成合成图像的情形的图。
43.图16是表示映射有合成图像的二维图像的图。
44.图17是表示映射有合成图像的三维模型的图。
45.图18是表示利用已生成的三维模型的处理的流程图。
具体实施方式
46.本发明所涉及的图像处理装置、图像处理方法及图像处理程序的一实施方式如下所述。在说明中,根据需要来参照附图。
47.[第一实施方式]
[0048]
[图像处理系统的结构]
[0049]
图1是表示图像处理系统1(图像处理装置)的概略结构的框图。图像处理系统1具备图像处理装置10(图像处理装置)和显示装置20(显示装置、监视器),是对分镜头拍摄被摄体(建筑物)所获取的多个图像进行损伤信息的提取、三维模型的创建、向二维图像的展开等的系统。图像处理系统1可使用个人计算机、平板终端、智能手机等设备(信息终端)构成。图像处理系统1的各要素可以收纳在一个框体中,也可以收纳在独立的框体中。另外,各要素也可以配置于远程位置并经由网络连接。
[0050]
[图像处理装置的结构]
[0051]
图像处理装置10具备处理部100、存储装置200及操作部300,这些各部相互连接以收发必要的信息。
[0052]
[处理部的结构]
[0053]
图2是表示处理部100(处理器)的结构的图。处理部100具备输入处理部102、获取处理部104、生成处理部106、展开处理部108、提取处理部110、映射处理部112、存储控制处理部114、对应建立处理部116、输出处理部118及通信控制部120,进行摄影图像的获取、三维模型的创建、向二维图像的展开、损伤信息的映射等。这些各部进行的处理的详情将在后文中描述。
[0054]
上述的处理部100的功能可使用各种处理器(processor)及记录介质实现。各种处理器还包括例如执行软件(程序)以实现各种功能的通用处理器即cpu(central processing unit)、图像处理专用处理器即gpu(graphics processing unit)、fpga(field programmable gate array)等在制造后可变更电路结构的处理器即可编程逻辑器件(programmable logic device:pld)。
[0055]
各功能可以由一个处理器来实现,也可以由同种或不同种的多个处理器(例如,多个fpga、或者cpu和fpga的组合、或cpu和gpu的组合)来实现。另外,也可以用一个处理器实
现多个功能。更具体而言,这些各种处理器的硬件结构是将半导体元件等电路元件组合而成的电路(circuitry)。
[0056]
在上述的处理器或者电路执行软件(程序)时,将执行的软件的计算机(例如,构成处理部100的各种处理器或电路和/或它们的组合)可读取的代码预先存储到rom等非暂时性记录介质(存储器)中,计算机参照该软件。在执行时,根据需要使用存储在存储装置中的信息。另外,在执行时,例如可将ram(random access memory;存储器)用作暂时性存储区域。
[0057]
此外,也可以是,由网络上的服务器(处理器)实现处理部100的功能的一部分或全部,图像处理装置10进行数据的输入、通信控制、结果显示等。在该情况下,构建包括网络上的服务器的application service provider型系统。
[0058]
[存储部的结构]
[0059]
存储装置200(存储装置、存储器)由cd(compact disk)、dvd(digital versatile disk)、硬盘(hard disk)、各种半导体存储器等非暂时性记录介质及其控制部构成,图3所示的信息相互关联地存储。摄影图像202是拍摄建筑物所得的多个图像,也可以包括拍摄日期时间不同的多个图像组。合成图像204是由摄影图像合成的、与特定部件对应的图像(的集合)。三维模型数据206(三维模型)是基于摄影图像创建的建筑物的三维模型,特定了构成建筑物的部件。此外,三维模型数据206与摄影图像、合成图像、损伤信息等建立对应。损伤信息208(损伤信息)是从摄影图像提取的、表示建筑物的损伤的信息。二维展开图像210(二维图像)是将建筑物的三维模型展开成二维的图像。
[0060]
除了这些信息之外,应用后述的sfm(structure from motion)时所需的摄像装置的参数(焦距、影像传感器的图像尺寸、像素间距等)也可以存储于存储装置200中。
[0061]
[操作部的结构]
[0062]
操作部300包括键盘310和鼠标320,用户能够通过这些设备进行本发明所涉及的图像处理所需的操作。也可以通过使用触摸面板式的设备而将显示装置20用作操作部。
[0063]
[显示装置]
[0064]
显示装置20(显示装置)例如是液晶显示器等设备,能够显示获取的摄影图像、损伤信息、三维模型、二维图像等信息。
[0065]
[图像处理的顺序]
[0066]
图4是表示本发明的图像处理方法的顺序的流程图。
[0067]
[图像的输入]
[0068]
输入处理部102(处理器)输入拍摄作为被摄体的建筑物所得的多个图像(步骤s100:输入处理、输入工序)。建筑物(建筑、结构物)例如是桥梁、道路等,但也可以是其他建筑物。另外,输入处理部102可以输入存储在存储装置200中的图像作为摄影图像202,也可以经由未图示的记录介质或网络输入图像。这些图像可通过无人机等飞行器或有移动功能的机器人等一边移动视点一边进行拍摄(也可以由用户拍摄)。拍摄的图像也可以不是立体图像。此外,为了三维模型的创建及图像合成,优选许多特征点在图像间之间是共同的,因此优选相邻的图像彼此充分(例如,面积的80%以上)交叠。图5是表示通过摄像装置30拍摄这样交叠的图像的情形的图。
[0069]
[损伤的提取]
[0070]
提取处理部110(处理器)基于输入的多个图像,提取建筑物的损伤信息(步骤s110:提取处理,提取工序)。提取处理部110在提取处理中能够提取损伤的种类、数量、大小、损伤程度及时间变化中的至少一个作为损伤信息。
[0071]
提取处理部110可使用各种方法提取损伤信息。例如,可使用日本专利4006007号公报所记载的裂纹检测方法或日本特表2010-538258号公报所记载的锈及剥离的检测方法。另外,提取处理部110可使用机器学习的方法提取损伤信息。例如,可将作为标签而赋予了损伤的种类或大小等的图像作为监督数据给出,并通过机器学习生成dnn(deep neural network)等学习器,使用生成的学习器检测损伤。
[0072]
提取处理部110可以从各个摄影图像中提取损伤信息并将对应的信息合成为一个,也可以从合成多个摄影图像而成的一个图像中提取损伤信息。损伤可表示为具有起点和终点的矢量,在该情况下,也可以如wo2017/110279号公报所记载的那样,考虑矢量彼此的层次结构。
[0073]
图6是表示提取的损伤信息的例子的图。提取处理部110能够将提取的损伤信息作为损伤信息208存储到存储装置200中。这样的损伤信息能够映射到建筑物的二维展开图像或三维模型上(参照步骤s150等)。
[0074]
[三维模型的创建]
[0075]
生成处理部106(处理器)基于输入的多个图像,创建建筑物的三维模型(步骤s120:生成处理、生成工序)。在三维模型中,存在三维点云模型、基于三维点云模型创建的三维多边形模型、三维网格模型、三维表面模型、或者在这些模型上纹理映射有图像的三维模型等各种模型。生成处理部106例如可使用sfm(structure from motion)的方法创建三维模型。sfm是根据多视点图像复原三维形状的方法,例如通过sift(scale-invariant feature transform)等算法计算特征点,将该特征点作为线索,使用三角测量的原理计算点云(point cloud)的三维位置。具体而言,使用三角测量的原理从摄像装置向特征点画直线,通过对应的特征点的两根直线的交点成为复原的三维点。然后,通过对检测出的每个特征点进行该作业,能够获得点云的三维位置。图7是表示三维模型的例子的图,该图的(a)部分是表示点云500(点云的例子)的图。此外,在sfm中不计算大小,而是例如通过进行与尺寸已知的部件的比较或者在被摄体上设置尺寸已知的标尺(scaler)并进行拍摄,能够进行与真实尺寸之间的对应建立。
[0076]
生成处理部106能够对如此获得的点云的数据应用例如tin模型(tin:triangulated irregular network)并用三角形近似建筑物的表面,基于其结果获得其他三维模型(多边形模型、网格模型、表面模型、实体模型等)。在这些模型内的三维实体模型中,建筑物的三维形状构成为如填充积木或块那样的全填充的三维部件的组合。此外,也可以是,在获得实体模型时,用户经由操作部300指定“点云的哪个范围处于同一个面”,生成处理部106使用其结果。另外,生成处理部106也可以使用ransac(random sample consensus)等算法推定属于同一个面的点自动生成实体模型,而不依赖于用户的操作。在生成实体模型时,生成处理部106也可以利用点云的三维位置、色(r、g、b)、亮度等信息及其变化。
[0077]
此外,在通过过去的检查等已经生成或获取了三维模型的情况下,生成处理部106也可以读入该模型(参照后述的图18及与该图有关的说明)。
[0078]
[部件的特定]
[0079]
优选的是,生成处理部106(处理器)在三维模型中特定构成建筑物的部件(特定处理、特定工序)。即,优选的是,生成处理部106特定“三维模型的各区域与建筑物的哪个部件对应”。生成处理部106可以基于用户的操作(例如,用鼠标320指定构成一个部件的范围)来特定部件,也可以不依赖于用户特定部件的操作而进行特定。生成处理部106也可以在特定部件时使用与部件的形状或尺寸相关的信息。例如可使用“在水平面内以二维状展开且面积为阈值以上的部件为底板”、“粘附在底板上且以一维状延伸的部件为主梁”等信息。另外,生成处理部106也可以使用通过给出构成三维模型的部件作为正确标签的机器学习构成的dnn等学习器来特定部件。图7的(b)部分是表示特定了部件的三维模型的例子的图。在该图的例子中,桥梁的三维模型510由底板512、壁部514及腿部516各部件构成。
[0080]
[三维模型的重构]
[0081]
有时因摄影条件或被摄体的状态,无法从摄影图像中获取足够数量的特征点,作为其结果,无法生成准确的模型(本来为一个的面被分割成多个面、应为多个面的部分被识别为一个面等)。于是,生成处理部106(处理器)能够基于用户的操作(例如,指定作为同一个面的区域的操作)进行三维模型的重构(重构处理、重构工序)。通过这种重构,用户能够获得适当的三维模型。
[0082]
[三维模型向二维图像的展开]
[0083]
展开处理部108(处理器)指定将生成的三维模型展开为二维图像时的条件(展开条件)(步骤s130:展开处理、展开工序)。例如,展开处理部108能够按照用户的操作指定展开的范围及展开时的边缘(构成三维模型的面的边界)。展开处理部108也可以指定展开条件而不依赖于用户的操作。图8是表示对三维模型指定展开条件的情形的图。在该图的(a)部分中,三维模型510(桥梁的一部分)由底板520、腿部530等部件构成。图8的(b)部分表示例如通过利用鼠标320的选择操作来指定腿部530(粗线部分)作为展开范围的情形,该图的(c)部分表示指定了展开范围及边缘(均为粗线部分)的情形。展开范围可以是三维模型的一部分,也可以是全部。通过这样的指定,用户能够按期望的边缘对期望的范围进行展开。另外,由于对于不需要的部分可以不进行展开,因此能够减轻展开处理对系统造成的负荷。
[0084]
展开处理部108按指定的条件将三维模型展开为二维图像(步骤s140:展开处理、展开工序)。图9是表示将在图8所示的三维模型510中被指定的范围(腿部530)沿着指定的边缘展开的情形的图。在图9中,分为左侧面532、壁面534以及右侧面536来展开。
[0085]
[使法线方向一致的展开]
[0086]
图10是表示从左侧面532侧观察腿部530的情形的图。在构成壁面534的区域534a、534b、534c中,法线方向分别是矢量537a、537b、537c所示的方向,各区域的法线方向不同。在这种情况下,展开处理部108能够使构成二维图像的区域的法线方向一致。例如如图11所示,展开处理部108能够将与纸面正交的方向(跟前侧)作为法线矢量,将壁面534作为由区域535a、535b、535c构成的壁面535进行展开。通过这样的展开,用户能够从相同方向观察被检体的各区域。
[0087]
[曲面的分割展开]
[0088]
展开处理部108能够将包括三维模型的曲面的部分分割成指定大小的平面并进行展开。图12是表示指定平面的大小(网格的宽度)的情形的图。图12的(a)部分是表示在圆柱
形的三维模型540中通过矩形区域543对侧面542指定平面的宽度(虚线部分的宽度)的情形的图,该图的(b)部分表示侧面542的一部分被分割成指定宽度的区域542a的状态。展开处理部108能够基于例如用户使用鼠标320进行的选择来进行矩形区域543等分割时的平面的大小的指定。另外,该图的(c)部分表示侧面542被分割成指定大小(宽度)的多个平面544并二维展开后的情形。
[0089]
图13是表示指定平面的大小(网格的宽度)的情形的另一图。该图的(a)部分是表示通过矩形区域545对三维模型540指定平面的宽度的情形的图。矩形区域545的宽度比图12所示的矩形区域543的宽度窄。同样,图13的(b)部分表示侧面542的一部分被分割成指定宽度的区域545a的状态,该图的(c)部分表示侧面542被分割成指定大小(宽度)的多个平面546并二维展开后的情形。
[0090]
展开处理部108能够考虑展开的精度、计算的负荷等来指定平面的大小(网格的宽度)。此外,也可以针对三维模型的每个区域改变平面的大小(网格的宽度)。例如,能够在平面及接近平面的形状的区域扩展网格的宽度(加粗),在曲率高的区域缩窄网格的宽度(减细)。通过这种网格宽度的指定,能够考虑建筑物的形状或展开精度等来进行适当的平面展开。
[0091]
[点云数据中的边缘指定]
[0092]
在图8中示出了对三维实体模型指定展开范围及边缘的例子,但也可以对三维点云数据进行展开范围及边缘的指定。图14是表示对点云500指定边缘550的情形的图。展开处理部108能够基于例如用户使用鼠标320进行的选择来进行这种指定。
[0093]
[合成图像的生成及映射]
[0094]
在步骤s120中生成的三维模型仅为形状的模型时,映射处理部112(处理器)能够如下所述将多个图像(摄影图像)合成(步骤s142:图像合成处理、图像合成工序),并将该图像(合成图像)映射到二维图像(或原来的三维模型)上(步骤s144:映射处理、映射工序)。
[0095]
映射处理部112能够以使对应的特征点在多个图像(摄影图像)间一致的方式通过移动、旋转、变形等来合成图像。这种方法在对象为平面状时特别有效,可获得高画质的图像。另外,映射处理部112也能够通过将多个图像投影到同一个平面上的正射投影或马赛克处理来合成图像。正射投影或马赛克处理在对象上存在凹凸时是有效的。因此,映射处理部112也可以根据对象(被摄体、建筑物)的形状来采用图像合成的方法。
[0096]
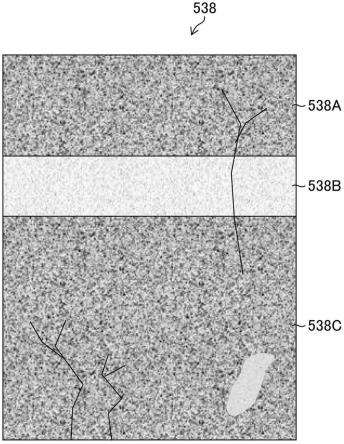
另外,映射处理部112能够通过例如表面映射、uv映射(除了xyz坐标系之外使用uv坐标系的映射)、平面映射、平面投影等进行映射。映射处理部112可以组合使用多个映射方法,也可以根据三维模型的形状分开使用多个方法。图15是表示合成图像的情形的图,在该图的(a)部分中,虚线是各摄影图像的范围,实线是合成图像的范围。另外,该图的(b)部分是合成图像的例子。图16是表示合成图像被映射在腿部530的二维图像535上后的映射图像538的图。区域538a、538b、538c是分别与图9的区域534a、534b、534c及图11的区域535a、535b、535c对应的区域。
[0097]
此外,映射处理部112可以由构成摄影图像的一部分的图像组生成合成图像,也可以由通过用户的操作等选择的图像组生成合成图像。例如,映射处理部112能够由画质高的图像(亮度适当、模糊和抖动少、从正面拍摄等)生成合成图像。
[0098]
[损伤信息的映射]
[0099]
映射处理部112(处理器)能够将在步骤s110中提取的损伤信息映射到将三维模型展开所得的二维图像或映射有合成图像的二维图像上(步骤s150:映射处理、映射工序)。输出处理部118(处理器)通过在显示装置20上显示、存储到存储装置200中(二维展开图像210)等方法输出映射后的二维图像(步骤s160:输出处理、输出工序)。
[0100]
[向三维图像的映射]
[0101]
映射处理部112还能够将合成图像映射到三维模型上。图17是表示将合成图像及损伤信息映射在图8所示的三维模型510上的映射图像539的图。
[0102]
[三维模型的存储]
[0103]
存储控制处理部114(处理器)能够将表示生成的三维模型的数据与摄影图像(输入的多个图像)及特定的部件建立对应,作为三维模型数据206存储到存储装置200(存储器)中(步骤s170:存储控制处理、存储控制工序)。
[0104]
处理部100(处理器)重复上述的处理,直到在步骤s180中成为yes。
[0105]
通过这样的处理,在图像处理系统1中,用户能够有效地处理拍摄建筑物所得的图像、建筑物的三维模型及损伤信息。
[0106]
[已有的三维模型的使用]
[0107]
在图4的流程图中,对从摄影图像生成新的三维模型的情况进行了说明,但在通过过去的检查等已经生成或者获取了三维模型的情况下,生成处理部106也可以读入该模型。即,也可以不在每次获取图像时生成三维模型。图18是表示使用已生成的三维模型的处理(本发明所涉及的图像处理方法的一方式)的流程图。在该流程图中,获取处理部104(处理器)获取拍摄建筑物所得的多个图像、即拍摄日期时间与存储在存储装置200(存储器)中的多个图像(成为三维模型生成的对象的过去的图像)不同的多个图像(例如,新的拍摄日期时间的图像)(步骤s102:获取处理、获取工序)。
[0108]
生成处理部106(处理器)读入已有的三维模型(步骤s122:读入处理、读入工序),对应建立处理部116(处理器)将在步骤s102中获取的多个图像和读入的已有的三维模型建立对应(步骤s124:对应建立处理、对应建立工序)。对应建立处理部116例如能够基于获取的多个图像与存储在存储装置200中的多个图像的相关进行对应建立处理(对应建立工序)。以下的处理(工序)与图4的流程图相同。
[0109]
即使在这样使用已有的三维模型的情况下,也能够进行损伤信息的提取、向二维图像的展开、向二维图像或三维模型的映射等,用户能够使用已有的三维模型有效地处理拍摄建筑物所得的图像、建筑物的三维模型及损伤信息。
[0110]
以上对本发明的实施方式进行了说明,但本发明不限于上述的方式,在不脱离本发明的精神的范围内可以进行各种变形。
[0111]
符号说明
[0112]
1 图像处理系统
[0113]
10 图像处理装置
[0114]
20 显示装置
[0115]
30 摄像装置
[0116]
100 处理部
[0117]
102 输入处理部
[0118]
104 获取处理部
[0119]
106 生成处理部
[0120]
108 展开处理部
[0121]
110 提取处理部
[0122]
112 映射处理部
[0123]
114 存储控制处理部
[0124]
116 对应建立处理部
[0125]
118 输出处理部
[0126]
120 通信控制部
[0127]
200 存储装置
[0128]
202 摄影图像
[0129]
204 合成图像
[0130]
206 三维模型数据
[0131]
208 损伤信息
[0132]
210 二维展开图像
[0133]
300 操作部
[0134]
310 键盘
[0135]
320 鼠标
[0136]
500 点云
[0137]
510 三维模型
[0138]
512 底板
[0139]
514 壁部
[0140]
516 腿部
[0141]
520 底板
[0142]
530 腿部
[0143]
532 左侧面
[0144]
534 壁面
[0145]
534a 区域
[0146]
534b 区域
[0147]
534c 区域
[0148]
535 壁面
[0149]
535a 区域
[0150]
535b 区域
[0151]
535c 区域
[0152]
536 右侧面
[0153]
537a 矢量
[0154]
537b 矢量
[0155]
537c 矢量
[0156]
538 映射图像
[0157]
538a 区域
[0158]
538b 区域
[0159]
538c 区域
[0160]
539 映射图像
[0161]
540 三维模型
[0162]
542 侧面
[0163]
542a 区域
[0164]
543 矩形区域
[0165]
544 平面
[0166]
545 矩形区域
[0167]
545a 区域
[0168]
546 平面
[0169]
550 边缘
[0170]
s100~s180 图像处理方法的各步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1