机电设备的优化开发的制作方法
1.本发明涉及用于开发机电设备(即电机或发电机)的方法、用于优化机电设备的设计的计算机程序以及用于优化机电设备的设计的计算机化优化设备,机电设备优选地包括具有大量可优化设计参数的绕组组件。
背景技术:
2.电动机的设计开发是复杂而繁琐的。只有针对高容量应用,才能开发新的电机设计。如今,用于制造数量较少的应用的电机除了重复使用只能部分适应特定应用的现有设计外,别无选择。此外,电动机设计的开发通常不仅基于电机本身的特性,如损耗、速度和转矩,还基于支持高效和经济生产的要求。特别是,电机的绕组组件目前设计为便于由传统绕线机制造,而不是用于创建高效电机。因此,此类实际绕组组件实际上具有有限数量的设计参数。因此,由于个性化电机开发(特别是个性化绕组组件开发)的负担和成本,大多数电动机,尤其是用于小容量应用的电动机,没有针对其应用进行优化。特别是在功率、大小和重量上都有严格限制的微型电机领域,经典电机技术限制了最佳应用的可能性。对应用进行充分优化的电机可为应用带来级联效益。例如,较轻的电机将需要较轻的机械结构来支撑,效率较高的电机将需要较小的电池,具有较低运行温度的电机将延长应用的寿命,等等。
3.在开发新电机时使用计算机化的模拟或模型。然而,在大多数应用中,计算机化的模拟和模型用于检查电机的最终性能,但不用于详细优化电机设计,尤其是不涉及每个绕组元件的详细程度。
4.自八十年代以来已知的技术提出将绕组组件的导体打印在印刷电路板(printed circuit board,pcb)上,并用pcb创建绕组组件。一种特殊技术使用柔性pcb,然后将其轧制成无刷电机的定子绕组组件。由于绕组组件不再考虑传统绕组制造机器的限制,pcb使得在开发绕组组件的设计方面具有更大的灵活性。因此,建议通过计算机化的优化工具来优化绕组组件的某些标准。
5.ep3014744建议针对特定固定导体轨道拓扑优化pcb上导体轨道的位置,以获得特定应用的最佳绕组组件。优化使用优化函数,如取决于电机转矩和绕组组件导体的电阻(也称为焦耳损耗)的电机常数。类似披露可在ep1590871和ep0949749中找到。
6.francois等人的文章“对pcb绕组中涡流损耗的分析估算,以实现pm无槽电机的最佳尺寸(analytical estimation of eddy current losses in pcb winding for the optimal sizing of pm slotless motor)”建议通过最小化优化函数来优化电机设计。选择优化函数,使得在涡流损耗、铁损耗、摩擦损耗和焦耳损耗的总和保持小于某一耗散能量的约束下,电机转矩最大化。
7.ep3297132公开了用于高转速的电机应用。为了避免绕组组件导体中的涡流,建议将构成电流路径的轨道分割为较小的平行导体轨道。然而,由于不同并联轨道中的感应电压不同,这会产生循环电流。因此,建议进行优化,以找到并联导体轨道之间的最佳连接位置,以减少循环电流。此处选择优化函数,以减少循环电流损耗或与其他损耗相比平衡循环
电流损耗。
8.现有优化算法显示了针对特殊应用的优化,但当针对其他电机应用的开发使用建议的计算机化优化时,通常无法实现。此外,所取得的改进仍然不够好,无法用经典的线圈代替经典的电机设计,还不能满足高端微电机的要求。目前没有通用的优化函数可以应用于许多不同的应用场景,并且每次都会得到优化绕组设计,这种优化绕组设计比传统的通常基于导线的绕组设计要好。
9.在发电机或组合电机发电机的开发中也会出现同样的问题。
技术实现要素:
10.目的是提供方法和优化工具,用于改进机电设备的开发,特别是减少机电设备的开发时间,以更好地使机电设备适应多种可能的应用(包括低容量应用),并进一步改进机电设备。
11.该目的通过用于生产形成机电设备的绕组组件的电路板的方法来解决。电路板包括绕组导体轨道。该方法包括以下步骤:在计算机化的优化工具中优化绕组组件的设计;以及根据绕组组件的优化设计,制造具有绕组导体轨道的电路板。该方法的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合。
12.该目的通过用于生产机电设备的绕组组件的方法来解决。绕组组件包括具有绕组导体轨道的电路板。该方法包括以下步骤:在计算机化的优化工具中优化绕组组件的设计;根据绕组组件的优化设计,制造具有绕组导体轨道的电路板;以及用所制造的电路板形成所述机电设备的绕组组件。该方法的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合。
13.该目的通过用于生产具有绕组组件的机电设备的方法来解决。绕组组件包括具有绕组导体轨道的电路板。该方法包括以下步骤:在计算机化的优化工具中优化机电设备的设计;根据机电设备的优化设计,制造具有绕组导体轨道的电路板;用制造的电路板形成机电设备的绕组组件;以及根据所述机电设备的优化设计,将所述机电设备与形成的绕组组件组装在一起。该方法的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合。
14.该目的通过根据先前描述的方法生产的绕组组件或机电设备来解决。
15.该目的通过由具有绕组导体轨道的电路板形成的绕组组件进一步被解决。绕组组件的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合,和/或通过上述方法制造。
16.该目的通过具有用于机电设备绕组组件的绕组导体轨道的电路板进一步被解决。电路板的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合,或通过上述方法制造。
17.该目的通过机电设备进一步被解决,该机电设备包括转子、定子、磁性设备和绕组组件,其中,绕组组件由具有绕组导体轨道的电路板形成。该机电设备的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合。
18.该目的通过用于开发具有绕组组件的机电设备或机电设备的绕组组件的计算机化优化工具进一步被解决,其中,绕组组件由具有绕组导体轨道的电路板形成,计算机化优
化工具被配置为优化机电设备的绕组组件的设计。计算机化优化工具的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合。
19.该目的通过用于开发具有绕组组件的机电设备或机电设备的绕组组件的计算机程序进一步被解决,其中,绕组组件由具有绕组导体轨道的电路板形成,计算机程序包括指令,指令被配置为在处理器上执行时优化机电设备的绕组组件的设计或优化机电设备的设计。计算机程序的特征在于随后描述的一个优选实施例或两个或更多个优选实施例的组合。
20.该目的通过计算机化的转换工具或计算机程序进一步被解决,计算机化的转换工具或计算机程序用于将机电设备的绕组组件的优化设计转换为电路板的设计。电路板的设计优选地包括以下各项的材料、位置和/或尺寸:(i)导体轨道,(ii)连接电路板不同导体层上导体轨道的连接器,以及可选地(iii)相邻基板。这种转换使得绕组组件的开发和制造几乎完全自动化,并大大减少新机电设备的开发时间。
21.随后描述了本发明的优选实施例。
22.在一个实施例中,优化函数对应于/包含/是以下优化函数中的至少一个:第一优化函数,其被定义为使得总损耗最小化,其中,损耗包括焦耳损耗、不平衡电流损耗、所述导体轨道中的涡流损耗、所述导体轨道外的涡流损耗,磁滞损耗、空气动力损耗和机械损耗中的两个或更多个;第二优化函数,其被定义为使得在所述机电设备或包含所述机电设备的产品的某个点或区域处的温度不超过最高温度的约束下,所述机电设备的电机转矩最大化;第三优化函数,其被定义为使得所述机电设备的大小和/或重量最小化;第四优化函数,其被定义为使得所述机电设备的转子的惯性被优化;第五优化函数,其被定义为使得所述机电设备的每体积密度的电机转矩或每质量密度的转矩最大化;第六优化函数,其被定义为使得所述机电设备的外部磁场最小化。虽然现有优化函数只能(经由电机常数或在给定最大允许损耗的情况下)最大化电机转矩以增加电机功率,但增加功率通常不是设计的目标。每种电机开发都是不同的。由于传统有线绕组的设计非常复杂,所以它总是被优化以提供最大功率,而不是为了达到特定的开发目标。所声称的替代优化函数都优化了机电设备的绕组,以达到特定的设计目标。这些优化函数与基于电路的绕组组件的优化相结合,可以将绕组组件优化至特定的设计目标,也适用于较少数量的机电设备。
23.在一个实施例中,在计算机化的优化工具中基于优化函数优化绕组组件的设计,其中,优化函数被定义为使得总损耗最小化,其中,总损耗包括焦耳损耗、不平衡电流损耗、导体轨道中的涡流损耗,导体轨道外的涡流损耗、磁滞损耗、空气动力损耗和机械损耗中的一个或更多个,优选为两个或更多个。这允许在给定电机转矩下将具有pcb绕组的电机的损耗降至最低,并开发最高效的电机。在现有技术中,要么对电机设计进行优化,以减少单一类型的损耗,要么使电机常数最大化。当使用优化函数最小化总损耗时,获得的电机设计相对于使用现有技术的优化函数获得的电机设计得到了显著改进。这是因为优化函数减少了不同类型的损耗,从而找到了不同损耗之间的最佳权衡。
24.在一个实施例中,优化函数被定义为使得在机电设备或包含机电设备的产品的某个点或区域处的温度不超过最高温度的约束下,机电设备的电机转矩最大化。此优化函数非常强大,可以优化绕组组件以获得最大功率,而不会使某点或区域处的温度超过最大温度。定义明确的点或区域中的温度通常是非常重要的开发目标,传统上通过选择功率使温
度不超过最高温度来实现该目标。
25.在一个实施例中,优化函数被定义为使得机电设备的大小和/或重量最小化。这样允许减小机电设备的大小或重量。在一个实施例中,优化函数被定义为使得机电设备的每体积密度的电机转矩或每质量密度的转矩最大化。虽然机电设备的许多元件已经针对大小和重量进行了优化,但绕组组件,尤其是基于电路的绕组组件尚未使用计算机化的优化工具进行优化,以减小机电设备的大小/重量或增加机电设备的每质量密度/大小密度的转矩。
26.在一个实施例中,优化函数被定义为使得机电设备的转子的惯性得到优化/最大化/最小化。同时考虑绕组组件的设计以优化转子的惯性,可以显著改进低惯性或高惯性电机的设计。
27.在一个实施例中,优化函数被定义为使得机电设备的外部磁场最小化。而外部磁场的降低通常是通过屏蔽外壳实现的。使用优化函数优化绕组组件以减少外部磁场是解决此问题的一种非常新的方法,可以避免机电设备的厚重屏蔽。
28.在一个实施例中,基于取决于涡流损耗、磁滞损耗、空气动力损耗和机械损耗中的至少一个的优化函数,在计算机化的优化工具中优化绕组组件的设计。
29.在一个实施例中,计算机化的优化工具被配置为基于考虑绕组导体轨道外的涡流损耗、磁滞损耗、空气动力损耗和机械损耗中的至少一个的设备模型来优化绕组组件。
30.在一个实施例中,优化函数或设备模型取决于焦耳损耗、不平衡电流损耗、绕组导体轨道外的涡流损耗、绕组导体轨道内的涡流损耗,磁滞损耗、空气动力损耗和机械损耗中的两个或更多个,优选为至少三个,优选为全部。这样可以对损耗进行更全面的评估,从而使优化工具能够基于更符合物理实际的参数执行优化。许多早期的模拟仅考虑了一种类型的损耗,如焦耳损耗或不平衡损耗,以基于选择的损耗类型优化绕组组件的单个特征。这在很大程度上限制了优化带来的改进,尤其是当涉及到相互排斥的设计决策时。此外,这降低了用于不同应用的工具的灵活性。很少有现有技术文件使用两种特定类型的损耗来权衡特定运行条件下特定问题的两种损耗。一般考虑2种或3种或更多种类型的损耗,使优化工具对于所有运行条件和所有类型的问题更加灵活。
31.在一个实施例中,计算机化的优化工具被配置为基于导体轨道横截面的方向或尺寸参数、并联或串联连接的导体轨道的数量和/或方式、层间连接(优选使用通孔)的坐标、一个或更多个导体轨道的厚度、绕组组件的尺寸、电路板的叠加数量、电路板基板横截面的方向或尺寸参数、电路板或基板的材料、线圈组件的连接、线圈组件的数量、绕组端子的数量和绕组端子的位置中的至少一个来优化绕组组件的设计。现有技术的优化算法只优化了导体轨道的曲率和电路板上导体轨道设计的一些有限参数,以找到绕组组件的最佳设计。然而,发现考虑上述一个或更多个参数可以显著改善优化结果的效果。导体轨道横截面的方向或尺寸参数、尤其是导体轨道的厚度和/或宽度对涡流损耗和焦耳损耗有重要影响。并联连接的导体轨道的数量对涡流损耗有重要影响。绕组组件的尺寸(例如其厚度)、相邻基板横截面的方向和尺寸、和/或电路板的叠加也对要开发的机电设备的性能有重要影响。电路板基板的厚度、线圈组件的连接、线圈组件的数量、绕组端子的数量和绕组端子的位置也被发现对优化设备的性能有重要影响。这些元件的材料也是如此。
32.在一个实施例中,方法包括以下步骤:在计算机化的转换工具中将绕组组件的优
化设计转换为电路板的设计,电路板的设计包括导体轨道的位置和尺寸,并且包括连接电路板不同导体层上导体轨道的连接器的位置和尺寸,其中,具有用于绕组组件的优化设计的导体轨道的电路板是基于电路板的转换设计制造的。优选地,该方法包括以下步骤:在计算机化的转换工具中,将电路板的设计转换为至少一台制造机器可读取的至少一个文件,并将至少一个文件发送到至少一台制造机器,其中,具有用于绕组组件的优化设计的导体轨道的电路板是使用所述至少一台制造机基于所述至少一个文件制造的。优选地,至少一个文件包括定义电路板每个导体层中导体轨道的位置和尺寸的至少一个第一文件(例如gerber、点云、gcode、加工说明、3d渲染文件或类似文件),可选地由一个第二文件补充,该第二文件包括来自不同导体层的导体轨道之间的连接器的位置和尺寸。在一个实施例中,可以将至少一个第一文件和一个第二文件集成到一个单个文件中。至少一个文件和/或第二文件还可以包括相邻基板或相邻套筒的位置、尺寸和连接信息。这种转换使得绕组组件的开发和制造几乎完全自动化,并显著减少新机电设备的开发时间。
33.在一个实施例中,绕组组件包括若干可堆叠电路板层的确定叠加,其中,每个电路板层对应于电路板的不同区域,其中,将绕组组件的优化设计转换为电路板的设计,以便基于该区域的电路板层调整不同区域中导体轨道之间的距离。根据电路板层调整导体轨道之间的距离有许多非常好的应用。通过将此步骤移出优化算法,优化和转换将变得更容易,而不会失去预期效果。
34.在一个实施例中,电路板是柔性电路板,其中,绕组组件是通过对制造的略微柔性的电路板进行轧制而形成的,以便柔性电路板的不同区域叠加在具有不同半径的不同电路板层中,其中,将绕组组件的优化设计转换为电路板的设计,以便不同区域中导体轨道之间的距离适应与该区域的电路板层的半径相对应的半径,以便在绕组组件优化设计中成角度地定位的导体轨道也位于由轧制电路板创建的绕组组件中。这使得能够保证轧制的柔性电路板中导体轨道的完美定位,从而保持优化工具中模型化的性能。
35.在一个实施例中,绕组组件的优化设计被转换为电路板的设计,以便基于电路板层调整不同区域中导体轨道之间的距离,从而使导体轨道在磁方向上遵循定义的偏差。这允许以后引入某些可能具有滤波目的或改善设备功能的偏差。
36.在一个实施例中,计算机化的优化工具包括机电设备的设备模型,该模型对机电设备的机械行为和电磁行为进行建模。设备模型优选地由允许模型参数空间中的模型参数集合定义。
37.在一个实施例中,计算机化的优化工具配置为接收机电设备的至少一个运行参数,其中,通过对模型参数集合重复具有不同值集合的不同优化循环,在计算机化的优化工具中优化绕组组件的设计,其中,每个优化循环使用针对各个优化循环的模型参数集合的值集合执行以下步骤:针对至少一个运行参数和实际优化循环的值集合,基于设备模型确定机电设备的机械行为和电磁行为;基于确定的机械行为和/或机电行为计算优化函数的结果;以及将优化函数的结果与至少一个先前优化循环的优化函数的至少一个结果进行比较。
38.在一个实施例中,计算机化的优化工具是可配置的,使得机器模型的模型参数集合中超过50%的模型参数是可配置模型参数,这些可配置模型参数可以在约束状态和自由状态中选择,其中,在约束状态下配置的每个可配置模型参数的优化被限制在允许模型参
数空间的子模型参数空间,在自由状态下配置的每个可配置模型参数的优化可以在允许模型参数空间中被自由地优化,以及/或者计算机化的优化工具是可配置的,使得可以在不同的优化函数中选择优化函数。这种可配置性使优化工具非常灵活,因此可以用于任何潜在的应用。在一种应用中,大小需要固定,并且转矩需要最大化,以获得给定的总损耗量,而在另一种应用中,对于给定的速度和转矩以及其他参数,总损耗量必须减少。这种可配置性是为任何应用快速开发设备的重要特征,因为优化工具不能针对每个应用进行调整。
39.在一个实施例中,计算机化的优化工具被配置为基于绕组组件和剩余机电设备设计的组合优化来优化机电设备。经典优化算法只能单独优化绕组组件的有限数量的参数。发现设备的其他部件(如转子、定子、磁性组件和间隙)与绕组组件之间的相互作用至关重要,绕组组件和机电设备的其他部件的参数的组合优化使机电设备的性能能够达到新的水平。这说明了综合优化与包含大量可优化参数的绕组组件相结合的好处,为机电开发人员提供了更大的自由度。这特别有利于旋转机电设备。
40.在一个实施例中,剩余机电设备的设计优化包括机电设备的磁性组件、机电设备的定子和转子之间的间隙、转子和定子中的至少一个的设计优化,具体而言,剩余机电设备的设计包括定子轭的材料和/或至少一个尺寸、磁性组件中的永磁体的材料和/或至少一个尺寸、磁性组件中的多个极对、转子轭的材料和/或至少一个尺寸以及间隙的厚度中的至少一个。
41.在一个实施例中,计算机化的优化工具被配置为基于用于机电设备的至少一种材料的优化来优化机电设备。结果表明,还考虑机电设备的材料显著改善了优化结果。优选地,用于机电设备的至少一种材料是机电设备的磁性组件、绕组组件、转子和定子中的一个或更多个的材料。磁性组件的材料可以是磁体的材料,也可以是保持磁体的支撑材料的材料。绕组组件的材料可以是电路板的基板和/或导体轨道的材料。转子或定子的材料可以是定子轭或转子轭的材料。
42.在一个实施例中,电路板包括从第一外围侧延伸到第二外围侧的至少两个连接导体轨道,其中,第一外围侧与第二外围侧相对布置,每个连接导体轨道在第一外围侧处具有第一连接端子,在第二外围侧处具有第二连接端子。从第一个外围侧延伸至第二个外围侧的连接导体轨道应包括所有类型的连接导体轨道,这些连接导体轨道允许第一端子连接至第一外围侧的连接导体轨道和/或允许第二端子连接至第二外围侧的连接导体轨道。本实施例的优点是,绕组组件的电路板可用于提供从绕组组件或设备的一侧到另一侧的连接线。特别是在微型电机中,电机的大小非常重要,电机周围单独的连接线会增加应用的大小或使结构复杂化。发现延伸穿过电机的连接线可以被设计成使得不会真正地干扰电机的功能,并且电路板的制造非常容易。连接线可以连接电气部件,例如位于动力工具尖端处的传感器,该动力工具的一侧包括电动机,另一侧包括电源。因此,第一连接端子可以连接到电源(例如网络),第二连接端子连接到工具的尖端。这两个连接导体轨道的其他功能也是可能的。本实施例对于轧制的柔性电路板特别有利。优选地,连接线彼此平行布置(在连接线的大部分上方)。为了尽可能近地布置连接线,连接线被布置在印刷电路板的相对侧处(在运动方向上处于相同的高度),或布置在相邻电路板层上面向彼此的导体层处(在运动方向上处于相同的高度),或者彼此相邻地布置在同一电路板层的同一导体层中。当连接线布置得彼此非常接近时,流过两条连接线的正向和反向电流会产生磁场,该磁场几乎相互抵消,
因此不会或仅轻微影响电机的运行。相反,由于绕组导体轨道产生的电磁场在正向轨道中感应出的电压几乎被反向轨道中的感应电压抵消,因此不会影响连接线的运行。连接导体轨道可以在电路板的外围侧附近彼此分叉,以便连接到(分叉部分)的连接端子彼此之间更好地绝缘和/或更容易接近。靠近外围侧的分叉连接导体轨道意味着它们(在运动方向上)的距离相对于它们在两个外围侧之间的电路板中心的距离增加。连接导体轨道和/或连接端子的位置、横截面参数(如厚度和宽度)和/或路径可以是模型参数,以便它们也得到优化。
43.在一个实施例中,计算机化的优化工具或计算机程序被配置为优化机电设备。
44.在一个实施例中,绕组导体轨道被配置为传导运行机电设备的电流。
附图说明
45.下图显示了本发明的一个或更多个非限制性实施例:
46.图1a以垂直于径向方向的截面图显示了具有径向磁化的旋转电动机的实施例。
47.图1b显示了单侧线性电动机的实施例。
48.图1c显示了双侧线性电动机的实施例。
49.图1d显示了具有轴向磁化的旋转电动机的实施例。
50.图1e显示了旋转无芯电机的实施例。
51.图2显示了本发明的优化工具、转换工具和系统的示意性实施例。
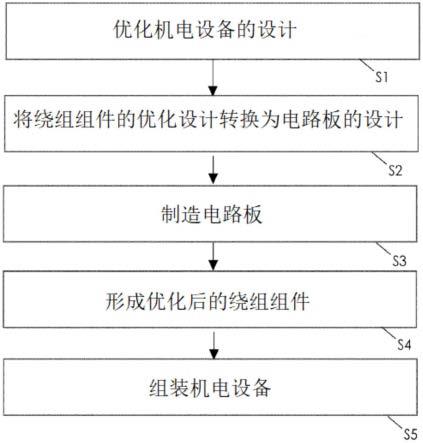
52.图3显示了解释本发明主要步骤的流程图。
53.图4a至图4d显示了电路板的不同可能实施例。
54.图5a至图5c显示了由电路板叠加形成的绕组组件的不同可能实施例。
55.图6a至图6e显示了转子中磁性组件的不同可能实施例。
56.在附图中,相同的附图标记已用于相同或相似的元件。
具体实施方式
57.在下一节中,将通过参考附图来描述本发明的非限制性实施例。
58.机电设备是电动机、发电机或组合式机电转换器。电动机将电能转换为动能。发电机将动能转换为电能。机电转换器可以用作电机和发电机。事实上,现今的许多电动机都是机电转换器,也能回收能量。如果为了简洁起见,随后仅针对电动机描述机电设备的功能,则其也应类似于发电机和机电转换器。
59.图1a至图1e显示了机电设备的示例性实施例。机电设备包括定子、转子、绕组组件40和磁性组件20。
60.转子相对于定子移动。机电设备的运动通常是旋转(旋转设备),如图1a、图1d和图1e中的实施例所示。然而,机电设备的运动也可以是如图1b和图1c中的实施例所示的线性电机(更一般地,线性设备)中的平移。在这种情况下,转子不旋转,而是平移,即沿直线移动。在这种情况下,转子有时也称为动子(mover)。以下描述涉及带旋转转子的旋转机电设备。然而,本公开同样可以应用于任何线性(也为平面或圆盘)设备和进行平移转子运动的其他设备或其组合。转子和定子之间设置有间隙30。如图1c和图1e中的实施例所示,间隙30可以包括多于一个间隙30。如果定子延伸到转子的两侧,则间隙30可以例如位于转子的两
个相对侧。间隙30通常是充满空气的空气间隙30。但是,也可以用另一种流体填充间隙30。流体可以是气体或液体。气体通常是空气。液体可以是水。具有多个转子、多个定子和多个间隙30的配置也是可行的。
61.在旋转设备的实施例中,定子优选地布置在转子周围,即转子在定子内旋转,如图1a所示。然而,转子也可能绕定子旋转,即转子布置在定子周围或外部,如图1e所示。定子和转子优选地布置成圆柱体,转子和定子中的至少一个是空心圆柱体,该空心圆柱体内包括转子和定子中的另一个,如图1a和图1e所示。转子和/或定子也可以具有图1d所示的圆盘形状。如果随后仅针对与定子成固定关系的绕组组件40描述机电设备的功能,则绕组组件40可以与定子是旋转关系。本公开同样可以应用于此类不同配置。
62.机电设备优选地包括三个方向。a)转子的运动方向。对于旋转设备,运动方向是角方向。b)(对于旋转设备)以转子的旋转轴方向延伸或(对于所有设备)沿垂直于运动方向和磁方向的方向延伸的转子方向。c)在绕组组件40和磁性组件20之间或在转子和定子之间相互作用的磁场的主方向上延伸的磁方向。对于具有径向通量的旋转设备,磁方向径向延伸至转子轴和/或垂直于运动方向和转子方向,如图1a和图1e所示。对于具有轴向通量的旋转设备,磁方向平行于转子轴(轴向地)延伸和/或垂直于运动方向和转子方向,如图1d所示。所有三个方向优选地相互垂直。对于机电设备的大多数部件,厚度表示磁方向的尺寸,以及/或者长度表示转子方向的尺寸。
63.定子优选地包括定子轭50。定子轭50通常具有以下功能:阻挡、输送和/或汇集机电设备内部的磁场以使机电设备外部的磁场较小或减小;以及/或者引导和/或增加布置在定子中的绕组组件40和/或磁性组件20的磁场。定子轭50优选地还具有支撑布置在定子中的绕组组件40或磁性组件20的功能。定子轭50优选由金属制成。定子轭50优选由磁性材料制成,所述磁性材料优选为顺磁性或铁磁性材料,甚至更优选为铁磁性材料。铁磁性材料可以是铁磁性金属。定子轭50的尺寸和材料是定子的参数。定子和/或定子轭50的尺寸优选地包括磁方向上的第一尺寸(例如厚度)和转子方向上的第二尺寸(例如长度)。该尺寸可以包括运动方向上的第三尺寸,但在大多数情况下,第三尺寸是360
°
。(第一、第二或第三)尺寸可以以相对距离(厚度、宽度、长度)或以一个或两个绝对位置(相关方向上的起点和终点)来表示。
64.转子优选地包括转子轭10。转子轭10优选地具有支撑布置在转子中的绕组组件40或磁性组件20和/或支撑传递机电设备运动能量的机械接口(对于旋转设备,轴与转子一起旋转)的功能。转子轭10例如由金属制成。转子轭10优选地由磁性材料制成,所述磁性材料优选为顺磁性或铁磁性材料,甚至更优选为磁芯材料。转子轭10的磁性材料可以在不同方向上布置(磁化)。转子轭10的尺寸、材料和材料的磁性布置是转子的参数。转子和/或转子轭10的尺寸优选地包括磁方向上的第一尺寸(例如厚度)和转子方向上的第二尺寸(例如长度)。该尺寸可以包括运动方向上的第三尺寸,但在大多数情况下,第三尺寸是360
°
。(第一、第二或第三)尺寸可以以相对距离(厚度、宽度、长度)或一个或两个绝对位置(相关方向的起点和终点)来表示。在一些实施例中,没有转子轭,例如在无芯设计中。
65.可选地,转子或定子可以包括围绕磁性组件20和/或在磁性组件20和间隙30之间的套筒(有时称为简单涂层)。转子套筒(布置在转子中的套筒)防止例如磁性组件20的永磁体因定子中的离心力而移动。定子或转子中的套筒可以进一步具有使间隙30中磁性组件20
的表面光滑或保护间隙30中磁性组件20的表面的功能。套筒的尺寸和/或材料可以是转子或定子的进一步参数(无论套筒布置在哪里)。
66.绕组组件40至少包括配置为传导机电设备的运行电流的绕组导体。运行电流驱动或移动转子,即产生移动/旋转磁场(沿磁场方向延伸),使电机转子移动(或旋转)。发电机中的运行电流是由发电机转子的运动引起的。绕组组件40优选地包括至少一个线圈组件、优选地包括至少两个线圈组件,优选地包括至少三个线圈组件。线圈组件是一个绕组端子和另一个绕组端子或连接点之间的至少一个绕组导体。连接点是将至少三个线圈组件或至少两个线圈组件与一个绕组端子进行连接的点。优选地,绕组组件40包括至少三个线圈组件,这些线圈组件以星形点或多边形连接方式连接。在星形点连接中,所有线圈组件都在一侧与绕组端子(针对每个线圈组件不同)连接,在另一侧与公共连接点(星形点)连接,公共连接点连接所有至少三个线圈组件。在多边形连接中,所有线圈组件都连接在两个连接点之间,其中,两个连接点中的每个连接点与相邻的线圈组件和绕组端子连接。优选地,绕组组件40包括以星形点或三角形连接方式连接的三个线圈组件(例如,对于(无刷)三相交流(ac)设备)。优选地,绕组组件40包括至少3个、优选地包括至少5个、优选地包括至少7个、优选地包括至少9个以多边形连接方式连接的线圈组件(例如,对于有刷直流(dc)设备)。在另一个实施例中,绕组组件40包括三个或更多个线圈组件,这些线圈组件通过一个或更多个星形点和/或通过多边形连接方式连接。绕组组件40优选地包括至少一个相。在一个实施例中,绕组组件40包括至少两个相,优选地包括三个相。也有可能存在具有多于三个相(例如6个相或9个相)的实施例。每个相包括至少一个绕组端子,用于将绕组组件40与电源(电池、电网或其他)连接,用于为电动机的相供电,以用于移动转子和/或用来自发电机转子的动力为电源充电。例如对于具有一个相的实施例,至少一个端子可以包括输入端子和输出端子。至少一个端子还可以针对每个相(仅)包括一个输入端子,而相的输出以星形点或多边形连接方式连接。
67.绕组组件40优选地包括电路板。电路板优选地包括基板和一些导体轨道。有许多可能的基板变体,因此应以广泛的方式理解这一术语。基板优选地与导体轨道相邻,并且可以在一个或更多个导体轨道的一侧或多侧提供电气绝缘,包括潜在地提供导体轨道的全封闭绝缘。基板还可提供热功能和/或提供机械功能,以用于承受导体轨道的重量,使导体轨道保持在适当位置或方便导体轨道的操作。这也可以支持来自机电设备的其他机械元件,例如转子的轴承。基板可以由不同的材料制成,例如但不限于塑料、聚合物、碳、薄膜、胶、陶瓷等,并且可以在加法、催化、成型或减法工艺中处理。
68.绕组组件40可以在机电设备内分为多个子组件。
69.电路板优选地包括至少一个或两个带导体轨道的导体层。至少一个或两个导体层优选地布置在电路板的两(水平或平面或相对)侧。电路板优选地包括至少一个外围侧,优选地包括连接两个平面侧的四个外围侧。四个外围侧优选地包括第一外围侧、第二外围侧、第三外围侧和第四外围侧。第一外围侧与第二外围侧相对布置。第一外围侧优选地平行于第二外围侧。第三外围侧与第四外围侧相对布置。第三外围侧优选地平行于第四外围侧。第一和/或第二外围侧优选地长于第三和/或第四外围侧。电路板优选地是pcb。然而,电路板还可以包括另一种电路板或任何其他水平基板,其具有形成导体轨道的至少一个或两个导体层。随后,该技术用pcb描述,但始终可以用另一电路板代替。导体轨道包括实现绕组组件
40的绕组导体的绕组导体轨道。绕组导体轨道被配置为传导机电设备的运行电流。绕组导体或绕组导体轨道被配置为传导驱动或移动转子的运行电流,即产生使电机转子移动(或旋转)或由发电机转子的移动引起的磁场。(绕组)导体轨道优选地布置在pcb的至少两个导体层中,优选地在pcb的顶侧和底侧。两个导体层的并排布置也是可能的。对于更复杂的pcb设计,至少两个导体层还可以包括更多导体层。pcb优选地包括用于在不同导体层上导电地连接(绕组)导体轨道的连接器。连接器可以替代地直接集成到导体轨道中。此类连接器优选地为定向互连接入。pcb(或电路板)优选地是柔性pcb(或其他柔性电路板)。在优选实施例中,绕组组件40是通过将具有导体轨道的柔性pcb轧制成空心圆柱体而形成的。柔性pcb优选地绕轧制轴轧制。轧制轴优选地平行于转子轴和/或平行于pcb的第三或第四外围侧。优选地,轧制pcb的第一和第二外围侧形成(空心)圆柱体的基面。
70.图4显示了不同的电路板拓扑。在图4a中,显示了电路板的第一实施例。电路板1包括基板2,在电路板顶部处具有导体轨道3的第一层5.1,在电路板底部处具有导体轨道3的第二层5.2。同一导体轨道层5.1或5.2的导体轨道3之间的空间填充有基板2。两层5.1和5.2中导体轨道3的一些位置通过连接器(例如通孔)4连接。图4b显示了电路板1的第二实施例,该电路板1类似于图4a中的电路板1。然而,同一导体轨道层5.1或5.2的导体轨道之间的空间没有填充基板。图4c显示了电路板1的第三实施例,该电路板1类似于图4a中的电路板1。然而,同一导体轨道层5.1或5.2的导体轨道不是敞开的,而是被基板2或另一保护层覆盖。图4d显示了电路板1的第四实施例,该电路板1类似于图4a中的电路板1。然而,电路板包括电路板中的三个(或更多个)导体轨道层5.1、5.2和5.3。电路板的许多其他实施例是可能的。电路板、导体轨道和/或基板可以以加法、催化、雕刻、机器加工、成型或减法工艺或其他形式获得或处理。如果电路板是通过诸如3d打印等加法制造工艺制造的,则两个导体层5.1和5.2之间的基板可能变得非常薄,并且可以被单独设计。然后可以在同一印刷工艺中逐层打印连接器、导体轨道和基板。这也将允许电路板的导体层5.1、5.2不布置在一个平面上,而是像意大利面条一样三维延伸。这可能是一种包含更多导体轨道并避免交叉的方法,而无需连接不同导体轨道层的专用连接器。此外,基板可以被设计以具有可能不同的厚度,可能含有一些空气以减轻重量等。因此,任何类型的电路板都可以通过新的制造方法或经典的制造方法生产。具有导体轨道和基板的电路板可以用3d打印直接以绕组组件40的最终形式来制造。因此,制造电路板的步骤和从电路板形成绕组组件40的步骤可以成为一个单独的步骤。
71.图5显示了绕组组件40的不同实施例,其具有叠加不同电路板层的不同类型。图5c显示了另一个实施例,其中电路板是柔性电路板,该柔性电路板被卷起以形成圆柱体或空心圆柱体,从而形成绕组组件40。因此,同一电路板1具有不同的部分1.i,这些部分(一旦卷积就)形成不同的电路板层1.i。图5b显示了电路板1的不同子电路板1.1、1.2、1.3的堆叠,其中,每个子电路板1.1、1.2、1.3形成不同的电路板层1.1、1.2和1.3。图5a显示了通过叠加(三个)不同的子电路板1.1、1.2、1.3而形成的绕组组件40。每个子电路板1.1、1.2,1.3都具有空心圆柱体的形式。子电路板1.1、1.2、1.3依次摆放(类似于关闭望远镜时)。子电路板之间可以存在一些连接6,以电气连接子电路板。例如,两个相邻的子电路板可以通过子电路板相应位置处的表面端子来连接,以便子电路板的表面端子面向彼此并接触(可能也焊接)。端子也可以被横向设置,然后通过焊接连接。电路板的许多其他叠加也是可能的。
72.绕组端子优选地布置在电路板的第一外围侧处。在轧制pcb的实施例中,可以经由圆柱体绕组组件40的基面处的绕组端子接触设备。
73.优选地,绕组组件40包括至少两个叠加电路板层。在wo2014207174a2和wo2016110549a1中详细描述了pcb导体轨道设计的不同示例,这些示例在此被并入用于绕组导体轨道和绕组组件40的设计。电路板层的叠加优选地通过轧制柔性电路板来实现,但也可以通过(柔性)电路板的其他成型(例如子pcb或来自子pcb的材料的折叠、层压、印刷、成型、机械加工、熔接或堆叠)来实现。然而,也有可能pcb没有被叠加,并且只有一个电路板层。
74.绕组组件40的参数为(成形的)绕组组件40的尺寸、叠加电路板的层数和电路板的参数。绕组组件40的尺寸可以包括绕组组件40(在磁方向上)的第一尺寸。绕组组件40的第一尺寸可以用相对厚度、绝对最大和最小半径、叠加pcb层数或pcb(在轧制方向上)的长度来表示。绕组组件40的尺寸还可以包括绕组组件40(在转子方向上)的第二方向,例如其长度。电路板的参数优选地包括导体轨道的参数、电路板的尺寸(例如基板的厚度或电路板的堆叠)、导体轨道的厚度、线圈组件的连接、不同导体轨道的数量和形状、线圈组件的数量、绕组端子的数量和/或绕组端子的位置。电路板中的厚度是指在垂直于电路板平面的方向上的尺寸。导体轨道的参数包括导体轨道的二维(two dimensional,2d)或三维(three dimensional,3d)曲率、导体轨道任意横截面的尺寸。导体轨道的尺寸特别包括导体轨道横截面的尺寸,例如导体轨道的宽度(垂直于导体轨道的纵轴,且平行于电路板的平面)、最小导体轨道之间的距离和/或(在pcb平面/pcb层/导体层的法线方向上的)厚度。导体轨道的材料可以包括(但不限于)铜、银、铁或适合通过电流或保持组件形状的任意金属。本发明对于随后形成绕组组件40的柔性电路板和/或对于叠加电路板(特别是对于轧制的柔性电路板)特别有利,但也可以通过本发明优化具有(硬的和/或非叠加的)电路板的绕组组件。
75.机电设备优选地包括磁性组件20。优选地,磁性组件20包括至少一个磁极,优选地包括至少一对磁极。每对磁极包括一个南极(在朝向绕组组件40的方向)和一个北极(在朝向绕组组件40的方向)。至少一个(一对)磁极可以由至少一个永磁体实现。至少一个磁极也可以通过电磁体实现。在这种情况下,磁性组件20可以利用一个或更多个类似于绕组组件40的导体轨道来实现,以在导体轨道传导(直流(direct current,dc))电流时实现电磁体。磁极的数量和/或磁性组件20的材料是磁性组件的重要参数。图6a至图6e显示了在转子中布置磁性组件20的不同示例。图6a显示了图1a所示的类似实施例,其中转子轴和/或转子轭10具有圆柱体形式或圆形横截面。磁性组件20具有圆形空心圆柱体形式或围绕转子轭10延伸的圆环形截面。图6b显示了无芯转子,即具有磁性组件20而没有芯或转子轭10的转子。在图6c至图6e中,转子轴和/或转子轭10具有多边形横截面形状,其是磁性组件中磁体数量的函数(即,如果磁性组件中有4个磁体,则为方形横截面;如果磁性组件内有6个磁体,则为六边形横截面等)。磁性组件20包括四个子组件,它们具有图6c中的弓形、图6d中的梯形和图6e中的面包条形状。图6a至图6e所示的磁性组件也可以布置在定子中,例如用于无芯电机。图6c还显示了空心转子轴和/或转子轭。
76.机电设备优选地包括转子和定子之间的间隙30。间隙30的参数优选地为转子和定子之间(在磁方向)的距离。间隙30的参数也可以包括间隙的材料,即间隙30中包含的流体。流体优选地是空气,即所谓的空气间隙。然而,间隙30中也可能有其他气体,甚至间隙30中
也可能有液体,例如水。
77.图1a至图1e显示了机电设备的不同示例性实施例。
78.在优选实施例中,磁性组件20布置在转子中,绕组组件40布置在定子中,如图1a、图1b和图1d所示。
79.在替代实施例中,磁性组件20布置在定子中,绕组组件40布置在转子中,例如如图1c和图1e所示。然而,这需要滑动电气接触路径,这会增加机器或连接到转子的线的机械磨损和摩擦,例如在线性机器中。然而,这对于具有极高动力的应用来说可能是有利的。
80.图1a所示的这种机电设备的第一示例具有旋转转子。转子布置在定子内,使定子围绕转子。转子和/或定子具有圆柱体形式,圆柱轴为旋转轴和/或转子方向。转子和定子同轴地布置。间隙30布置在定子和转子之间。转子包括转子轭10和磁性组件20。优选地,磁性组件20布置在转子轭100和间隙30之间。可选地,转子可以包括如上所述的转子套筒(图1中未显示)。定子包括定子轭50和绕组组件40。绕组组件40优选地布置在定子轭50和间隙30之间。
81.图1b显示了具有直线平移转子(straight translating rotor)(或动子)的机电设备的第二示例,即所谓的线性机电设备。间隙30布置在定子和转子之间。转子包括转子轭10和磁性组件20。优选地,磁性组件20布置在转子轭10和间隙30之间。可选地,转子可以包括如上所述的转子套筒(图1b中未显示)。定子包括定子轭50和绕组组件40。绕组组件40优选地布置在定子轭50和间隙30之间。在本实施例中,定子和转子的功能可以很容易地与具有转子轭50和绕组组件40的转子以及具有定子轭10和磁性组件20的定子互换。
82.图1c显示了具有直线平移转子的机电设备的第三示例,即线性机电设备的第二示例。设备包括布置在定子之间的转子,定子在两侧围绕转子。因此,转子在定子中移动。定子因此包括位于转子第一侧的第一定子部分和位于转子第二侧的第二定子部分。因此,在定子和转子之间布置的间隙30包括第一定子部分和转子之间的第一间隙30以及第二定子部分和转子之间的第二间隙30。转子仅包括绕组组件40。定子包括磁性组件20,优选地包括第一定子中的第一磁性组件20和第二定子中的第二磁性组件20。定子包括定子轭50,优选地包括第一定子中的第一定子轭50和第二定子中的第二定子轭50。第一磁性组件20优选地布置在第一定子轭50和第一间隙30之间。第二磁性组件20优选地布置在第二定子轭50和第二间隙30之间。在本实施例中,定子和转子的功能可以很容易地与具有转子轭50和磁性组件20的转子以及具有绕组组件40的定子互换。转子可以具有布置在定子第一侧的第一转子和布置在定子第二侧的第二转子。第一转子将包括第一转子轭50和第一磁性组件20。第二转子将包括第二转子轭50和第二磁性组件20。
83.图1d显示了转子围绕旋转轴或转子轴60旋转的机电设备的第四示例。图1a显示的是径向通量机器,而图1d显示的是磁方向与转子方向平行的轴向通量机器。转子和/或定子为圆盘形。定子和/或转子的圆盘平面垂直于转子方向和/或旋转轴。间隙30布置在定子和转子之间。转子包括转子轭10和磁性组件20。优选地,磁性组件20布置在转子轭10和间隙30之间。可选地,转子可以包括如上所述的转子套筒(图1d中未显示)。定子包括定子轭50和绕组组件40。绕组组件40优选地布置在定子轭50和间隙30之间。在本实施例中,定子和转子的功能可以很容易地与具有转子轭50和绕组组件40的转子以及与具有定子轭10和磁性组件20的定子互换。
84.图1e显示了具有旋转转子的机电设备的第五实施例。图1e示出了类似于图1a的径向通量机器,但采用无芯设计。转子和/或定子具有圆柱体形式,圆柱轴为旋转轴和/或转子方向。转子和定子同轴地布置。转子包括绕组组件40。该设备包括布置在定子之间的转子,定子在两侧围绕转子。转子在定子内旋转。定子优选地包括位于转子第一侧的第一定子和位于转子第二侧的第二定子。因此,布置在定子和转子之间的间隙30包括第一定子和转子之间的第一间隙30以及第二定子和转子间的第二间隙30。第一定子布置在转子内部,第二定子布置在转子外部。第一定子优选地具有全圆柱体形式。第二定子优选地具有空心圆柱体形式或围绕第一定子布置的套筒的形式。转子优选地具有空心圆柱体形式或布置在第一定子周围和/或第二定子内的套筒的形式。第一定子、第二定子和转子同轴地布置。定子包括定子轭50,优选地包括第一定子中的第一定子轭50和第二定子中的第二定子轭50。定子包括磁性组件20,优选地在第一定子中。第一磁性组件20优选地布置在第一定子轭50和第一间隙30之间。然而,也可以将磁性组件20布置在第二定子中。在这种情况下,可以避免第一定子。也将可以在第二定子中布置第二磁性组件,类似于图1c的实施例。
85.机电设备可以是直流(dc)机器,即由dc电流供电的dc电机,或者是将转子的运动转化为dc电流的dc发电机。机电设备也可以是交流(alternating current,ac)机器,即由ac电流供电的ac电机,或将转子的运动转换为dc电流的ac发电机。机电设备可以是有刷的或无刷的。机电设备可以是有芯的(在转子中有芯或磁性转子轭10)或无芯的(在转子中没有芯或磁性转子轭11)。
86.图2显示了用于开发机电设备的设计的计算机化的优化工具。
87.优化工具包括建模装置m和优化装置o。
88.优化工具接收至少一个运行参数op作为输入参数。运行参数op优选地包括电机转矩、电机速度、设备损耗以及设备温度中的至少一个,优选地包括齐总两个。输入参数优选地包括至少一个运行参数的至少一个值,例如电机正常运行时的运行值对。然而,也有可能给出至少一个运行参数的值范围。可以结合加权函数给出值范围,该加权函数指示值范围内各个值的频率。这个加权运行值范围也可以称为运行周期。
89.优化工具优选地接收至少一个约束c、模型参数po的初始化值集合和/或配置输入l作为进一步的可选输入参数。优化工具优选地经由人机界面或机器对机器界面接收输入参数,优选地经由具有屏幕和/或输入设备(如键盘、触敏表面、鼠标等)的计算机用户界面。输出参数,包括数据的视觉表示(图表、表
……
)也可以通过相同的界面传递。配置输入l表示与用户选择有关的所有输入参数,涉及下面指示的所有可配置参数。
90.建模装置m被配置为对机电设备建模。建模装置m优选地包括用于对机电设备建模的设备模型。建模装置m和/或设备模型被配置为对设备的电磁行为和机械行为建模。设备模型可以是数值模型和/或分析模型。优选地,设备模型结合了数值模型和分析模型。设备模型由模型参数集合描述。模型参数集合优选地包括定子参数、转子参数、磁性组件20的参数、绕组组件参数和/或间隙30的参数(如上文所述)。模型参数集合优选地包括至少5个、优选地包括至少10个、优选地包括至少20个、优选地包括至少30个不同的模型参数。模型参数集合的值优选地由允许模型参数空间来限制。允许模型参数空间包含设备本身提供的所有约束(不能经由输入进行配置),例如,如果转子布置在定子内部,转子的外部尺寸必须小于定子的内部尺寸等。模型参数的允许模型参数空间可以是离散的或连续的。例如,间隙30的
厚度值是相当连续的,电路板的堆叠值是相当离散的,只允许提供商或制造机器进行堆叠。允许模型参数空间可以通过用户输入的约束c进一步限制为子模型参数空间。一个模型参数的约束可以将此模型参数设置为固定值,也可以将模型参数限制为值范围或多个值范围。建模装置m和/或设备模型被配置为基于运行参数op和基于从优化装置o接收的模型参数的值集合pi,对设备的电磁行为和机械行为进行建模。建模装置m和/或设备模型被配置为基于运行参数op和模型参数的值集合pi来确定结果值ri。如果给出了至少一个运行参数op的值范围,则结果值ri是基于至少一个运行参数op的值范围计算的,优选地是基于至少一个运行参数的值范围的多个实现计算的。优选地,结果值ri是基于平均数计算的,优选地是基于作为输入参数接收的加权函数的多个实现所产生的结果值ri的加权平均数计算的。结果值ri被配置为计算下面更详细描述的优化函数。结果值ri可以进一步作为优化函数本身。优选地,结果值ri包括评估优化后的电机所需的所有值。然而,结果值(或产生值(resulting values))ri也可能仅包括计算优化函数所需的值,并且仅在最终优化迭代中或之后计算设备感兴趣的剩余结果值rf,以可选地给出值rf。结果值ri或rf可以是损耗、转矩、速度、磁场、电阻、机械摩擦、空气动力摩擦、电机大小、电机重量等。优选地,优化工具100、建模装置m和/或设备模型优选地可配置,以便用户在不同的设备模型中选择,每个设备模型具有不同的模型参数集合。不同的设备模型可以区分例如ac或dc设备、有刷或无刷设备、在转子中具有磁性组件20和在定子中具有绕组组件40或者反之亦然的设备等。优选地,优化工具100、建模装置m和/或设备模型优选地可配置,以便用户选择哪些模型参数是可优化的,哪些参数是被约束的。优选地,至少50%、优选地至少60%、优选地至少70%、优选地至少80%、优选地至少90%、优选地所有模型参数是可优化的和/或可约束的(通过用户选择)。
91.优化装置(或优化器)o被配置为在不同的优化循环i中重复优化过程。优选地,优化过程以迭代或递归方式重复。优化装置o在每个优化循环i重复以下过程:确定模型参数的值集合pi,将值集合pi发送给建模装置m,接收结果值ri,基于ri计算优化函数,并将优化函数的结果与至少一个先前优化循环的优化函数的结果进行比较。优化循环的细节在优化算法中定义。可以使用任何标准优化算法或自定义优化算法。在一个实施例中,优化器o使用遗传优化算法。优选地,针对第i个循环的建模参数,使用遗传优化算法的优化器在每个优化循环中使用值集合pik中的多个k。在一个实施例中,使用确定性优化算法。优选地,优化工具100或优化器o在不同的优化算法之间是可配置的,优选地尤其是在确定性算法和遗传算法之间。优化算法优选地执行对最小化一个或几个优化函数的参数值的搜索。然而,优化算法可以被定义为使得优化函数最大化,以找到最佳值。
92.第一优化循环的值集合pi可以是随机选择的,也可以基于初始化值集合、或基于历史值、或基于优化器中存储的一些其他规则。后续优化循环的值集合pi优选地基于先前优化循环的值集合pi-1和/或基于先前优化循环的优化函数。值集合pi也可以(例如,在遗传优化算法中)随机选择。
93.优化器o从建模装置m接收结果值ri,并基于接收的结果ri计算优化函数f(ri)。在非常简单的情况下,优化函数可以是从建模装置m直接接收的结果ri。优化函数优选地取决于以下一个或更多个参数:设备的焦耳损耗、(随后省略的设备的)不平衡电流损耗、涡流损耗、滞后损耗、空气动力损耗、机械损耗、电机的转矩或力、电机常数kp、设备体积、设备质
量、纹波(转矩振荡)、成本或采购信息。优化函数被定义以最大化或最小化某个优化参数。这意味着优化器继续优化模型参数pi的值,使得优化参数最小或最大。优化函数因此取决于优化参数。优化函数可能还依赖于进一步的模型参数或约束参数,但优化器不会最小化或最大化这些参数。例如,在将总损耗保持在阈值以下的约束条件下,优化函数最大化电机转矩,将不会使总损耗最小化,而只是约束优化中的总损耗。优选地,优化函数为以下之一:
94.在一个实施例中,优化函数被定义为使得电机常数kp最大化。电机常数kp优选地取决于电机转矩和电机损耗,尤其是电机的焦耳损耗。优选地,优化常数取决于电机转矩与取决于损耗的值(优选地为取决于损耗的值的平方根)的比。取决于损耗的值优选地是焦耳损耗。焦耳损耗是指由于绕组导体中的(特别是绕组导体轨道中的)电阻引起的损耗。在一个实施例中,优化函数被定义为使得总损耗最小化。在这种情况下,优选地将电机转矩和电机速度作为输入运行参数给出。总损耗优选地包括焦耳损耗、不平衡电流损耗、涡流损耗、磁滞损耗、空气动力损耗和机械损耗中的一个、两个、三个、更多个或全部。由导体内磁场的变化或时间演变在导体内引入电流(循环电流)的涡流(也称为傅科电流(foucault’s current))回路。涡流损耗是由设备中的涡流引起的损耗。涡流可能出现在绕组导体和设备的其他导电部件中。涡流损耗因此通常包括导体涡流损耗(在绕组导体中引起)和剩余涡流损耗(在设备的其他导电部件中引起)。不平衡电流是由于绕组导体不同部件处的不同磁场而由电压差引起的电流,特别是在线圈组件中使用多个平行导体轨道时。不平衡电流损耗是指由绕组导体中的不平衡电流引起的设备损耗。磁滞损耗是指铁磁性部件中的磁滞损耗,特别是定子轭50和转子轭10中的磁滞损耗。空气动力损耗是指由间隙30中的转子引起的空气动力摩擦引起的设备损耗。机械损耗是指由设备的机械部件引起的损耗,尤其是转子和/或刷子(如有)的轴承的损耗。总损耗优选地取决于焦耳损耗、不平衡电流损耗、涡流损耗、磁滞损耗、空气动力损耗和机械损耗中的两个或更多个的线性组合/加权和。
95.在一个实施例中,优化函数被定义为使得针对给定的总损耗量或温度最大化电机转矩。在优选实施例中,优化函数被定义为使得在电机或包含电机的产品的某点或区域的给定最高温度下,将电机转矩最大化。在这种情况下,优选地将(某点或区域处的)总损耗或温度和电机速度作为输入运行参数。
96.在一个实施例中,优化函数被定义为使得电机的大小和/或重量最小化。在这种情况下,优选地将电机转矩和电机速度作为输入运行参数。
97.在一个实施例中,优化函数被定义为使得最大化电机的每体积密度转矩或每质量密度转矩。在这种情况下,优选地将电机转矩和电机速度作为输入运行参数。
98.在一个实施例中,优化函数被定义为使得转矩振荡最小化。在这种情况下,优选地将电机转矩和电机速度作为输入运行参数。
99.在一个实施例中,优化函数被定义为使得优化转子的惯性,优选地最小化转子的惯性。
100.在一个实施例中,优化函数被定义为使得最小化电机的给定点或子区域处的温度。
101.在一个实施例中,优化函数被定义为使得机电设备的一个或更多个部件的成本最小化。在这种情况下,优选地将机电设备的一个或更多个部件的成本或采购信息作为输入运行参数。成本可能包括购买、制造或劳工成本。采购信息可能包括提前期、供应商信息、物
流信息等。
102.在一个实施例中,优化基于上述优化函数中的一个。在另一实施例中,优化基于同一优化过程中的两个或更多个优化函数。在一个实施例中,基于两个或更多个优化函数的优化基于优化算法执行双目标或多目标优化,双目标或多目标优化考虑两个或更多个优化函数,优选地考虑两个或更多个上述优化函数。在另一个实施例中,基于两个或更多个优化函数的优化基于使用由两个或更多个上述优化函数的线性组合形成的优化函数的(单目标)优化。优选地,如果优化仅基于一个或多于一个优化函数,则用户可以选择。优选地,用户可以选择哪些优化函数被选择和/或组合以及/或者如何组合它们(每个优化函数的权重)。
103.优化器o或优化工具100优选地可配置,以便用户可以在不同的优化函数中进行选择,优选地在一个或更多个上述优化函数中进行选择。优化器o或优化工具100优选地是可配置的,以便用户可以在仅基于一个优化函数的单目标优化算法和基于至少两个优化函数的双目标优化算法之间进行选择。
104.优化器o优选包括停止准则,以用于停止优化循环并给出模型参数的最终值集合pf。停止准则可以是例如(在最后n个优化循环内)优化函数不再改进或改进小于某个阈值。停止准则也可以是最大循环次数。在优化器检测到停止准则后,优化器给出模型参数的最终值集合pf。
105.最终值集合pf包括用于定义电路板的模型参数(电路板参数)的第一值集合pfw和用于其他模型参数的第二值集合pfo。第一值集合pfw用于根据优化结果制造电路板,而第二值集合pfo用于根据优化结果制造设备的其他部件,根据优化结果形成电路板并根据优化结果组装设备。
106.在优选实施例中,优化器优化绕组组件40和剩余设备的参数。发现绕组组件40的设计与剩余设备高度相关。仅通过优化绕组组件40,优化结果是有限的。通过同时优化这两者,优化设备的性能得到显著提高。然而,在另一个实施例中,也可以仅优化绕组组件40或电路板的参数。
107.上述优化器o使用由模型参数p定义的设备模型m(经典参数性优化器)。然而,优化器o也使用生成性设计来优化机电设备或其一部分的设计(生成性设计优化器)。代替转子轭10的实心圆柱体环,生成性设计优化可以用于找到重量、成本和稳定性方面的最佳零件。代替使用电路板上的绕组导体轨道设计的固定拓扑并优化拓扑参数,生成性设计可用于找到绕组导体轨道的最佳拓扑。生成性设计是指,在机电设备、或转子、或定子、或磁性组件20、或绕组组件40或电路板中的二维或三维位置空间中,位置空间中的每个位置点可以在其材料或其设备功能方面变化。设备功能是,位置点属于磁性组件20、绕组组件40、间隙30、转子轭10、定子轭50、转子和/或定子。因此,生成性设计并不是仅优化固定拓扑的参数,还可以通过创建新拓扑来优化拓扑。这可能产生真正的优化零件,这些零件不受人类逻辑约束的限制,而仅受给予优化器o的机电约束的限制。这可以与上述参数性优化器结合,以使优化器0包括参数性优化器和生成性优化器。这两个优化器可以通过使用来自生成性优化器的最后生成性优化步骤/循环的生成性设计来运行参数性优化器的一个或更多个参数性优化循环,随后通过使用来自生成性设计优化器的最后参数性优化步骤/循环的参数性设计来运行生成性优化器的一个或更多个生成性优化循环来组合等。
108.优化工具100优选地包括温度模型t。温度模型基于模型参数的最终集合pf和最终结果值rf计算机电设备的温度,并给出设备的温度tf。温度可以是平均值,也可以是设备上方的温度场。温度模型t有助于更好地了解优化后的设备的温度。在另一个实施例中,如果温度是优化函数的相关参数,则温度模型可以是建模装置m的一部分。
109.计算机化的优化工具100优选地是在计算机或处理器或芯片上执行的软件。计算机也可以是服务器。计算机或处理器可以包括如在云计算或数据处理中心中的多个子处理设备。计算机化的优化工具100也可以是设备,例如芯片、计算机或专用优化器。计算机化的优化工具100也可以是存储上述软件的软件产品。
110.图2进一步显示了计算机化的转换工具200。
111.计算机化的转换工具200包括第一转换器c1。计算机化的转换工具200,特别是第一转换器c1被配置为将来自计算机化优化装置100的绕组组件40的优化设计、即绕组组件40或电路板的模型参数的值集合pfw转换为电路板的设计d。电路板的设计d包括(i)导体轨道和/或(ii)连接电路板不同导体层上导体轨道的连接器和/或(iii)基板的材料、位置和/或尺寸。电路板的设计d、特别是导体轨道的设计与绕组组件40的设计、特别是优化器o中使用的绕组导体轨道不同。在优化器o中,可以对导体进行一些近似以便更容易地对其建模,以及/或者在用于制造电路板的电路板设计d中,存在额外的约束,例如来自电路板的制造机器的约束。优选地,计算机化的转换工具200包括第二转换器c2。第二转化器c2和/或计算机化的转换工具200将电路板的设计转换为可由至少一台用于制造电路板的制造机器300读取的至少一个文件f。然后基于电路板的转换后的设计d制造根据优化设计的具有导体轨道和/或连接器的电路板,优选地由制造机器300基于文件f来制造电路板。文件f优选地包括多个文件,优选地包括至少一个第一文件和/或至少一个第二文件,第一文件定义(i)至少两个导体层上的导体轨道的材料、位置或尺寸,第二文件定义(ii)至少两个导体层之间的连接器和/或(iii)基板的材料、位置或尺寸。至少一个第一文件优选地包括至少两个第一文件,其中,每个第一文件包括至少两个导体层中的一个导体层的导体轨道的位置和/或尺寸。第一文件优选地是gerber文件。至少一个第二文件优选地是drill文件。至少一个第二文件优选地包括使用的每种类型的连接器或通孔的单独文件。优选地,将至少一个文件f发送到制造机器300,以根据绕组组件40的优化设计制造电路板。
112.如上所述,电路板优选地通过在多个电路板层中叠加电路板而形成绕组组件40。这可以通过柔性电路板、可折叠电路板或包含多个单独子电路板的电路板来实现。每个电路板层对应于电路板的不同(表面)区域。计算机化的转换工具200优选地被配置为将绕组组件40的优化设计转换为电路板的设计,以便基于该区域所处的电路板层来调整不同区域中导体轨道之间的距离。这种考虑在优化工具100中可能过于复杂,因此在转换工具200中更容易实现。导体轨道之间的距离是指相邻导体轨道(优选地在电路板的同一侧)之间的距离。在某些情况下,转换器也可能改变电路板不同侧导体的距离。该距离优选地总是在电路板的平面或与该平面平行的任何平面上测量。
113.在一个实施例中,电路板是柔性电路板,其中,绕组组件40是通过轧制制造的柔性电路板形成的,使得柔性电路板的不同区域叠加在具有不同半径的不同电路板层处。优选地,将绕组组件40的优化设计转换为电路板的设计,使得不同区域中的导体轨道之间的距离适应于与对应于相应区域的电路板层半径相对应的半径,以便在绕组组件40的优化设计
中成角度对准的导体轨道也在由轧制电路板创建的绕组组件40中对准。结果表明,这种小的转换步骤提高了优化后的设备的性能。
114.在一个实施例中,绕组组件40的优化设计被转换为电路板的设计,以便基于电路板层调整不同区域中导体轨道之间的距离,从而使导体轨道在磁方向上遵循定义的偏差。与来自优化工具100的设备的优化设计相比,这种偏差可能是轧制电路板的导体轨道的某个角偏差。这种偏差的工作原理例如类似于电磁噪声的滤波器,例如电磁相干的滤波器。角偏差可能是使在优化设计中成角度对准的导体轨道在转换后的设计中具有从电路层到电路层的固定角度差。在线性机器或具有堆叠或折叠电路板层的轴向通量旋转机器中,可以实现类似的偏差。
115.计算机化的转换工具200优选地是在计算机或处理器或芯片上执行的软件。计算机也可以是服务器。计算机或处理器可以包括如云计算或数据处理中心中的多个子处理设备。计算机化的转换工具200也可以是设备,例如芯片、计算机或专用优化器。计算机化的转换工具200也可以是软件或存储上述软件的软件即服务(software-as-a-service,saas)产品。计算机化的转换工具200可以是与计算机化的优化工具100相同的软件,也可以是单独的软件。在后一种情况下,两个不同的软件可以安装在同一处理器或同一计算机上,也可以安装在不同的计算机或处理器上。
116.图2显示了具有优化工具100、转换工具200和用于制造绕组组件40的电路板的制造机器300的系统。
117.所描述的系统和优化工具能够在很短的时间内,在没有或很少的人机交互的情况下,开发一种优于现有技术中的机电设备的新型机电设备。即使是小体积应用,所开发的机电设备也可以是个性化的,并且表现出显著提高的性能。绕组组件40的设备开发和电路板制造可以完全或至少高度自动化,以便开发快速且容易。
118.图3显示了用于制造绕组组件40和用于制造机电设备的方法。
119.在第一步骤s1中,使用上述计算机化的优化工具100优化机电设备的设计。优选地,优化工具100的输入参数被输入到计算机化的优化工具100中,特别是机电设备将运行的运行参数op。优选地,还定义了机电设备的约束,例如尺寸、最高温度、重量等。优选地,优化工具100配置有输入l,例如通过选择优化函数、设备模型、优化算法等进行配置。然后,优化工具100优化机电设备,并输出用于机电设备的优化设计的模型参数pf。
120.在步骤s2中,与电路板相关的模型参数pfw在上述转换工具200中被转换为电路板的设计d,优选地,在具有设计d的文件f中,文件f可被电路板的制造机器300读取。
121.在步骤s3中,基于绕组组件40的优化设计,优选地基于电路板的转换设计d,优选地基于文件f制造电路板。绕组组件40优选地由至少一台制造机器制造。
122.在步骤s4中,根据来自计算机化的优化工具100的绕组组件40的优化设计(由pf确定),用制造的电路板来形成绕组组件40。在一个实施例中,轧制制造的柔性电路板以获得圆柱体绕组组件40,优选地为空心圆柱体绕组组件40。要形成的绕组组件40的电路板层的内半径、外半径和/或数量由优化工具的输出pf定义。然而,从电路板获得绕组组件40的其他形成过程也是可能的。步骤s3和步骤s4最终可以合并为单个步骤。
123.步骤s1至步骤s4描述了开发(或优化)和制造绕组组件40的方法。
124.在步骤s5中,组装机电设备。这包括根据来自优化工具100的优化设计,制造和购
买机电设备的剩余零件,如磁性组件20、定子(轭)、转子(轭)。绕组组件40和剩余零件按照预期组装在优化工具100的设备模型中。
125.步骤s1至步骤s5描述了开发(或优化)和制造机电设备的方法。
126.应当理解,本发明不限于所描述的实施例,并且可以在不超出所附权利要求的范围的情况下应用变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1