机器人、包括机器人和用户终端的系统及其控制方法与流程
本公开涉及包括多个传感器的机器人、包括机器人和用户终端的系统及其控制方法。
背景技术:
1、近年来,已经积极开发了用于布置在室内空间中以向用户提供服务的机器人的技术。具体地,用于清洁室内空间的机器人可以通过多个传感器识别周围物体,并且基于关于识别出的物体的信息提供服务。
2、然而,设置在机器人中的多个传感器可能由于外部物理冲击或老化引起的机械变形而导致其性能劣化。相关技术的机器人即使在传感器的性能劣化的情况下也不具有校准性能的功能,因此不能防止机器人提供的服务质量的下降。
3、因此,一直需要机器人能够对多个传感器中的至少一个传感器持续地执行校准并提供高质量服务。
技术实现思路
1、技术问题
2、鉴于上述需求而做出本发明,本发明的目的在于提供一种在预定事件发生之后移动到预定点、并对多个传感器中的至少一个传感器执行校准的机器人及其控制方法。
3、技术方案
4、根据本公开的实施例,提供了一种机器人,该机器人包括:多个传感器;存储器;驱动单元;以及处理器,被配置为:基于识别出发生了预定事件,控制驱动单元使得机器人移动到预定点;基于识别出机器人已移动到预定点,通过多个传感器获取多个图像;基于所获取的多个图像来识别是否需要对多个传感器中的至少一个传感器执行校准;响应于识别出需要对至少一个传感器执行校准,基于多个图像获取用于校准与至少一个传感器相对应的感测数据的校准数据,并且将所获取的校准数据存储在存储器中;响应于从至少一个传感器获取到感测数据,基于存储在存储器中的校准数据来校准所获取的感测数据;以及基于经校准的感测数据来控制驱动单元。
5、处理器可以被配置为:基于所获取的多个图像来识别多个传感器中的每一个是否存在机械变形;以及基于识别出多个传感器中的至少一个传感器存在机械变形,识别出需要对至少一个传感器执行校准。
6、存储器可以存储与预定点相关的参考图像,并且处理器可以被配置为:基于所获取的多个图像获取深度图像,将参考图像与所获取的深度图像进行比较,以及基于比较结果来识别是否需要对多个传感器中的至少一个传感器执行校准。
7、处理器可以被配置为:基于识别出已达到预定时间间隔、或执行了预定数量的任务的间隔,识别出发生了预定事件。
8、处理器可以被配置为:基于识别出机器人已停靠在充电站处,识别出机器人已移动到预定点。
9、机器人还可以包括距离传感器,并且处理器可以被配置为:在识别出机器人已移动到预定点之后,基于由距离传感器获取的感测数据来识别在预定点的周围环境中是否存在动态物体,以及基于识别出存在动态物体,结束对多个传感器的校准操作。
10、机器人还可以包括用户接口以及通信接口,并且处理器可以被配置为:基于通过用户接口或通信接口中的至少一个接收到用户命令,控制驱动单元使得机器人移动到预定点。
11、处理器可以被配置为:基于获取的校准数据,额外从至少一个传感器获取感测数据;通过将校准数据应用到额外获取的感测数据来获取经校准的感测数据;以及基于识别出与感测数据相比经校准的感测数据改善了阈值或更多,将所获取的校准数据存储在存储器中。
12、处理器可以被配置为:基于在识别出机器人已移动到预定点之后发生机器人的行进模式改变的事件,结束对多个传感器的校准操作。
13、根据本公开的另一实施例,提供了一种系统,该系统包括机器人和用户终端,其中,用户终端被配置为:基于输入了用于对设置在机器人中的多个传感器执行校准的用户命令,向机器人发送用户命令;并且机器人被配置为:响应于从用户终端接收到用户命令,基于当机器人移动到预定点并且位于预定点处时从多个传感器获取的多个图像,识别是否需要对多个传感器中的至少一个传感器执行校准,以及响应于识别出需要对至少一个传感器执行校准,基于多个图像获取用于校准与至少一个传感器相对应的感测数据的校准数据,并且将所获取的校准数据存储在存储器中。
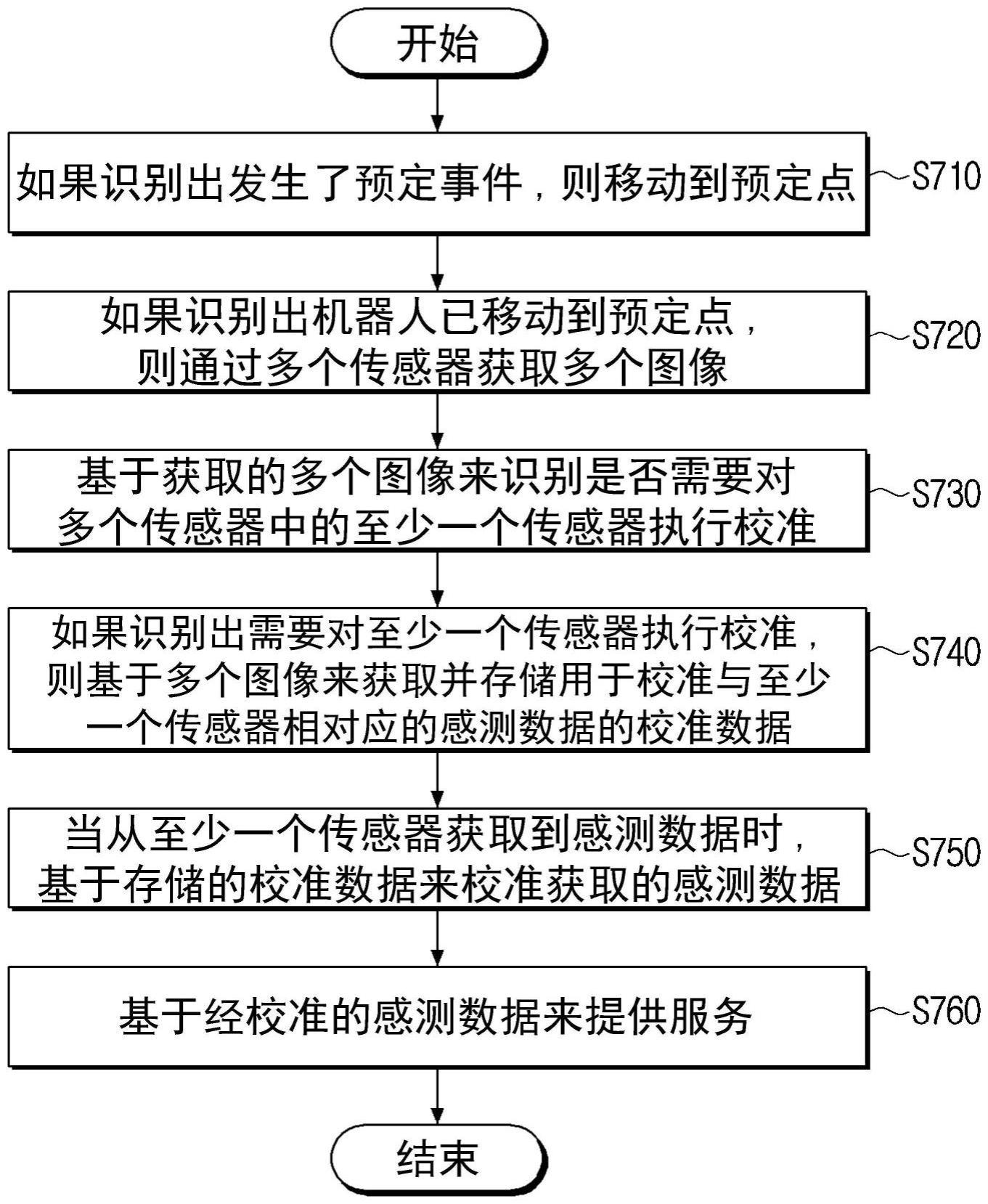
14、根据本公开的另一实施例,提供了一种用于控制机器人的方法,该方法包括:基于识别出发生了预定事件,将机器人移动到预定点;基于识别出机器人已移动到预定点,通过多个传感器获取多个图像;基于所获取的多个图像来识别是否需要对多个传感器中的至少一个传感器执行校准;响应于识别出需要对至少一个传感器执行校准,基于多个图像获取并存储用于校准与至少一个传感器相对应的感测数据的校准数据;响应于从至少一个传感器获取到感测数据,基于所存储的校准数据来校准所获取的感测数据;以及基于经校准的感测数据来驱动机器人。
15、识别是否需要执行校准可以包括:基于所获取的多个图像来识别多个传感器中的每一个是否存在机械变形;以及基于识别出多个传感器中的至少一个传感器存在机械变形,识别出需要对至少一个传感器执行校准。
16、识别是否需要执行校准可以包括:基于所获取的多个图像获取深度图像;将与预定点相关的参考图像与所获取的深度图像进行比较;以及基于比较结果来识别是否需要对多个传感器中的至少一个传感器执行校准。
17、移动机器人可以包括:基于识别出已达到预定时间间隔或执行了预定数量的任务的间隔中的至少一个,识别出发生了预定事件。
18、获取多个图像可以包括基于识别出机器人已停靠在充电站处,识别出机器人已移动到预定点。
19、有益效果
20、根据本公开的各种实施例,机器人可以获取具有高可靠性的感测数据并基于该感测数据提供服务,从而提高用户的便利性。
技术特征:
1.一种机器人,包括:
2.根据权利要求1所述的机器人,其中,所述处理器进一步被配置为:
3.根据权利要求1所述的机器人,
4.根据权利要求1所述的机器人,其中,所述处理器进一步被配置为:基于识别出经过了预定时间间隔、或已达到执行了预定数量的任务的间隔,识别出发生了所述预定事件。
5.根据权利要求1所述的机器人,其中,所述处理器进一步被配置为:基于识别出所述机器人已停靠在充电站处,识别出所述机器人已移动到所述预定点。
6.根据权利要求1所述的机器人,还包括:
7.根据权利要求1所述的机器人,还包括:
8.根据权利要求1所述的机器人,其中,所述处理器进一步被配置为:
9.根据权利要求1所述的机器人,其中,所述处理器进一步被配置为:基于在识别出所述机器人已移动到所述预定点之后发生所述机器人的行进模式改变的事件,结束对所述多个传感器的校准操作。
10.一种系统,包括机器人和用户终端,所述机器人包括多个传感器,其中:
11.一种用于控制机器人的方法,所述方法包括:
12.根据权利要求11所述的方法,其中,识别是否需要执行所述校准包括:
13.根据权利要求11所述的方法,其中,识别是否需要执行所述校准包括:
14.根据权利要求11所述的方法,其中,移动所述机器人包括:基于识别出已达到预定时间间隔或执行了预定数量的任务的间隔中的至少一个,识别出发生了所述预定事件。
15.根据权利要求11所述的方法,其中,获取所述多个图像包括:基于识别出所述机器人已停靠在充电站处,识别出所述机器人已移动到所述预定点。
技术总结
公开了一种机器人。该机器人包括:多个传感器;存储器;驱动单元;以及处理器。处理器可以:基于识别出发生了预定事件,控制驱动单元使得机器人移动到预定点;基于识别出机器人已移动到预定点,通过多个传感器获取多个图像;基于所获取的多个图像来识别是否需要对多个传感器中的至少一个传感器执行校准;响应于识别出需要对至少一个传感器执行校准,基于多个图像获取用于校准与至少一个传感器相对应的感测数据的校准数据,并且将所获取的校准数据存储在存储器中;响应于从至少一个传感器获取到感测数据,基于存储在存储器中的校准数据来校准所获取的感测数据;以及基于经校准的感测数据来控制驱动单元。
技术研发人员:柳旼佑,李东勋,金信,张义宁,河昌湖
受保护的技术使用者:三星电子株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!