一种基于半径增量约束的大面积动物毛皮轮廓图像的切割方法
1.本发明涉及对大面积动物毛皮轮廓图像的切割技术领域,特别涉及一种基于半径增量约束的大面积动物毛皮轮廓图像的切割方法。
背景技术:
2.毛皮的切割是毛皮制革行业中的初加工工序,但由于大型原料皮味道重,工作环境较差,每次切割需要4~8刀不等,工人切割时需要不停的弯腰,长时间工作容易体力不支,因此工作强度大,缺乏新的年轻劳动力,导致企业招工困难。而现有技术自动化水平低,因此急需一种能够识别大面积动物毛皮的切割部位特征并给出切割路径的方法。
技术实现要素:
3.为了克服上述现有技术的不足,本发明的目的在于提供一种基于半径增量约束的大面积动物毛皮轮廓图像的切割方法,能够将不同形状大小的动物毛皮图像切割开,并给出相应的切割线,搭配相应的水刀切割等方式能够进行自动化切割,从而满足后续毛皮自动化切割工业生产要求。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种基于半径增量约束的大面积动物毛皮轮廓图像的切割方法,包括以下步骤;
6.步骤(1):将一张大型动物毛皮水平放置在橡胶板上,通过正上方的工业相机采集毛皮表面图像进行预处理,获取图像的轮廓图像;
7.步骤(2):将得到的轮廓图像建立相应的坐标系,得到此时整体轮廓的质心坐标,将质心坐标设为新的坐标系原点,建立新的坐标系;
8.步骤(3):以坐标原点为中心,沿着x轴正方向顺时针作射线,将该轮廓分为角度相同的n等份,将每一条射线与边缘轮廓点的交点用点进行标记,记为初始点,共有n个初始点;
9.步骤(4):将每一个初始点与质心的欧式距离定义为轮廓半径长度,定义当前初始点与上一个初始点的轮廓半径长度的比值为当前初始点的轮廓半径增长率,依次对轮廓初始点进行检测,设置半径增长率的阈值约束,将不符合阈值约束的点,将这些点进行剔除;
10.步骤(5):经过阈值约束调整后的轮廓点为满足阈值约束条件的点,将这些点进行保留,并连接这些点形成最终的切割路线。
11.所述步骤(1)预处理的步骤包括图像去噪、二值化、形态学修补和图像轮廓提取,具体步骤如下:
12.1)图像去噪处理:使用双边滤波对采集得到的图像进行去噪处理,去除图像采集过程中产生的各类图像噪声;
13.2)图像二值化处理:使用基于otsu(最大类间方差法)的阈值分割方法,将图像处理成前景毛皮为白色、背景橡胶板为黑色的二值化图像;
14.3)图像形态学缺陷修补:使用图像闭操作处理二值化后的图像:即先对二值化图像腐蚀操作,进一步消除细小噪声点;再膨胀操作,填补前景毛皮中识别为背景的黑色空洞区域;
15.4)图像轮廓提取:使用图像轮廓跟踪技术,基于相邻像素的黑白关系,确定毛皮轮廓的外边界、孔边界及对应的层次关系。保留外边界,舍弃内部孔边界,即得到最终的毛皮轮廓图像。
16.所述步骤2)具体为:
17.根据轮廓图像的大小,在图像的左上角顶点建立二维平面直角坐标系,由公式(1)求得质心c坐标(xc,yc),以质心坐标为原点坐标,建立新的坐标系,图中质心坐标为c(393,461);
[0018][0019]
式中,x为轮廓质心的横坐标,y为轮廓质心的纵坐标,xi为轮廓点i的横坐标,yi为轮廓点i的纵坐标,n为轮廓点的总个数,新的坐标系以轮廓质心为坐标原点,此时能直观的反应边缘上的轮廓点距离轮廓质心的距离变化情况。
[0020]
所述步骤2)建立新的坐标系具体为:
[0021]
以坐标原点为起点,沿着x轴正方向顺时针作一条射线l与接触到的第一个轮廓线相交于一点,该点与轮廓质心点的欧式距离定义为轮廓半径长度,记为r,该射线与x轴正方向的夹角记为θ,沿着顺时针方向作第二条射线与接触到的第一个轮廓线相交于一点,这两条射线的夹角记为δθ,初始角度θ0与角度增量δθ可以根据实验效果进行修改,令循环次数i=0,设置空的一维列表p与r。
[0022]
所述步骤3)具体为:
[0023]
以质心为起点作射线l,由公式(3)约束l与x轴的夹角,检测射线l与毛皮边缘的第一个交点pi,并由公式(2)计算交点pi与质心c的欧式距离ri;
[0024][0025]
式中,ri为轮廓点i的轮廓半径长度,根据公式(4)约束每一条射线与x轴的夹角θ,即:
[0026]
θ=θ0+i
·
δθ
ꢀꢀꢀꢀꢀꢀꢀ
(3)
[0027]
式中,θ为当前射线与x轴正方向的夹角,θ0为初始角度,δθ为相邻两条射线的角度增量,顺时针遍历整个空间0
°
~360
°
,本文选取θ0=0
°
,即第一条射线方向为x轴正方向,设置角度增量δθ=5
°
,发射射线与接触到的第一个轮廓线相交于一点,将这些点标记,此时,射线将该轮廓分为72等份,每一等份的角度为5
°
,此时所有标记点为初始点,记所有初始点坐标为pi,i为当前初始点编号,i=1,2,3......72。
[0028]
所述步骤(4)中半径增长率的阈值最大为110%,最小为90%,即轮廓点的半径增
长率大于110%或者小于90%时,则被判定为不符合阈值约束的点;
[0029]
当增长率过快,即增长率超过110%的初始点,在当前角度上重新确定一个新的轮廓点进行替换,通过变化矩阵将新轮廓点的半径增长率变化为110%,从而确定新轮廓点的位置,原不符合要求的初始点被剔除,当增长率过慢,即增长率低于90%的初始点,对当前轮廓点的前一个角度上的轮廓点进行重新替换,通过变化矩阵将当前初始点的半径增长率变化为90%,从而把上一个初始点进行剔除,确定了新轮廓点的位置,再次对上一个轮廓点进行检测其增长率是否满足最大增长率阈值和最小增长率阈值的要求,满足要求则顺时针进行下一个轮廓点的判定,不满足要求则重复上述操作,直至所有点满足阈值约束为止。
[0030]
所述阈值约束规则具体为:
[0031]
需要切割部位的轮廓半径长度随着角度的变化而急剧变化,根据轮廓半径长度,定义当前初始点与上一个初始点的轮廓半径长度的比值为当前初始点的轮廓半径增长率。最大轮廓半径增长率阈值η
max
与最小轮廓半径增长率阈值η
min
可根据毛皮种类和特征自定义修改,本文选取η
max
=110%,η
min
=90%;
[0032]
式中,η为当前点的轮廓半径增长率,ri为当前初始点的轮廓半径长度,r
i-1
为上一个初始点的轮廓半径长度,因为需要切割部位的轮廓半径增长率变化相对比较剧烈,因此根据此类特征可以设置相应的阈值进行筛选,让阈值范围内的初始点保留下来,将阈值范围外的初始点进行剔除,以便进行后续的图像处理;
[0033]
若此时列表p的长度len(p)为0,则进行步骤8);否则,由公式(4)计算轮廓半径增长率,进行步骤6)。
[0034][0035]
所述最大阈值约束;若η≥η
max
,则调整交点pi的坐标为pi',pi'由公式(5)计算,重新计算交点pi与质心c的欧式距离,记为r',并将之放入列表r中,将交点pi放入列表p中,由公式(6)得出pi'的轮廓半径增长率,执行步骤8);若η<η
max
,则执行步骤7);
[0036][0037]
式中pi'为新的标记点(该点替换掉了当前不符合阈值要求的初始点)的坐标,为顺时针旋转θ角度的变换矩阵,c为质心坐标,r'为待求选择点的轮廓半径,r
i-1
为前一个新标记点(或满足要求保留的初始点)的轮廓半径,η
max
为设置的最大阈值。由此公式能将当前的初始点替换成一个新的标记点,并令其满足阈值条件;
[0038][0039]
最小阈值约束;若η≤η
min
,则令j=1,由公式(7)重新计算交点p
i-j
的坐标,重新计算交点p
i-j
与质心c的欧式距离,记为r
i-j
,当j=1时,将计算结果放入列表r和p中,当j>1
时,将列表r和p中原来的结果替换;令j=j+1,由公式(8)计算p
i-j
的轮廓半径增长率,若η≤η
min
,则重复步骤7)去判断p
i-j
的前一个初始点,否则,执行步骤8);
[0040][0041]
式中,p
i-j
为当前初始点的前j个初始点的坐标,j是初始值为1的循环递增变量,r
i-j-1
为初始点i前j+1个初始点的半径长度;
[0042][0043]
由以上公式能将当前初始点的前一个初始点替换成一个新的标记点,并令其满足阈值条件。
[0044]
所述步骤(5)具体为:
[0045]
空间遍历判定条件;判定是否θ≤θ
max
,若是,则令i=i+1,并执行步骤(3);否则执行步骤(5);
[0046]
目标切割线连接;通过轮廓半径增量阈值约束规则,对超越阈值的交点进行处理使之满足阈值条件,满足阈值条件的最终所有交点即为最终的切割点,将所有满足要求的初始点和标记点记为最终点,并按照顺时针连线得出切割路径,此切割路径为最终的目标切割线,依次连接列表p中的坐标点,画出切割线。
[0047]
本发明的有益效果:
[0048]
本发明方法能够去寻找并识别大面积动物毛皮的废弃区域特征,从而规划出切割路径将废弃部分切除,对于不同大小形状的毛皮都能自适应的分配合理阈值来提取切割区域,同时对毛皮轮廓具有较好的区分度,可以准确的定位目标区域,将所有需要切割的位置都能成功的提取出来,具有较强的容错率。通过该技术能有效将毛皮的头和蹄,尾部等废料部位进行切除,为自动化切割毛皮提供了新方案,能够解决传统工业中人力切割毛皮存在的人力不足、招工困难等问题。
附图说明
[0049]
图1为本发明方法流程示意图。
[0050]
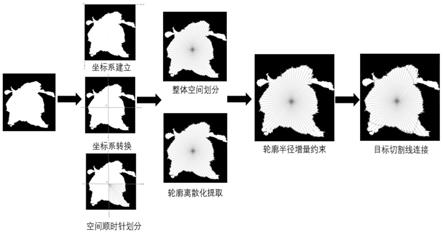
图2为本发明简要技术流程图。
[0051]
图3为本发明算法步骤流程图。
[0052]
图4预处理流程图。
[0053]
图5坐标系建立及转换流程图。
[0054]
图6空间划分结果图。
[0055]
图7初始点标记结果图。
[0056]
图8阈值约束调整后的轮廓点平面图。
[0057]
图9基于最终点的轮廓切割线示意图。
[0058]
图10不同形状大小的轮廓图像的最终提取结果。
具体实施方式
[0059]
下面结合附图对本发明作进一步详细说明。
[0060]
如图1-图3所示,发明的具体步骤如下:
[0061]
步骤1:图像预处理;
[0062]
将一张大型动物毛皮水平放置在橡胶板上,通过正上方的工业相机采集毛皮表面图像进行预处理,得到毛皮图像的二值化轮廓图像。其预处理流程图如图4所示,具体步骤如下:
[0063]
1)图像去噪处理:使用双边滤波对采集得到的图像进行去噪处理,去除图像采集过程中产生的各类图像噪声;
[0064]
2)图像二值化处理:使用基于otsu(最大类间方差法)的阈值分割方法,将图像处理成前景毛皮为白色、背景橡胶板为黑色的二值化图像;
[0065]
3)图像形态学缺陷修补:使用图像闭操作处理二值化后的图像:即先对二值化图像腐蚀操作,进一步消除细小噪声点;再膨胀操作,填补前景毛皮中识别为背景的黑色空洞区域;
[0066]
4)图像轮廓提取:使用图像轮廓跟踪技术,基于相邻像素的黑白关系,确定毛皮轮廓的外边界、孔边界及对应的层次关系。保留外边界,舍弃内部孔边界,即得到最终的毛皮轮廓图像。
[0067]
步骤2坐标系建立及转换:
[0068]
完成上述预处理步骤完成后,根据轮廓图像的大小,在图像的左上角顶点建立二维平面直角坐标系,由公式(1)求得质心c坐标(xc,yc),以质心坐标为原点坐标,建立新的坐标系,坐标系建立及转换流程图如图5所示,图中质心坐标为c(393,461);
[0069][0070]
式中,x为轮廓质心的横坐标,y为轮廓质心的纵坐标,xi为轮廓点i的横坐标,yi为轮廓点i的纵坐标,n为轮廓点的总个数,新的坐标系以轮廓质心为坐标原点,此时能直观的反应边缘上的轮廓点距离轮廓质心的距离变化情况。
[0071]
步骤3:参数初始化;以坐标原点为起点,沿着x轴正方向顺时针作一条射线l与接触到的第一个轮廓线相交于一点,该点与轮廓质心点的欧式距离定义为轮廓半径长度,记为r,该射线与x轴正方向的夹角记为θ,沿着顺时针方向作第二条射线与接触到的第一个轮廓线相交于一点,这两条射线的夹角记为δθ,初始角度θ0与角度增量δθ可以根据实验效果进行修改,令循环次数i=0,设置空的一维列表p与r。
[0072]
步骤4:轮廓离散化提取;以质心为起点作射线l,由公式(3)约束l与x轴的夹角,检测射线l与毛皮边缘的第一个交点pi,并由公式(2)计算交点pi与质心c的欧式距离ri;
[0073]
[0074]
式中,ri为轮廓点i的轮廓半径长度,根据公式(4)约束每一条射线与x轴的夹角θ,即:
[0075]
θ=θ0+i
·
δθ
ꢀꢀꢀꢀꢀꢀ
(3)
[0076]
式中,θ为当前射线与x轴正方向的夹角,θ0为初始角度,δθ为相邻两条射线的角度增量,顺时针遍历整个空间0
°
~360
°
,本文选取θ0=0
°
,即第一条射线方向为x轴正方向,设置角度增量δθ=5
°
,发射射线与接触到的第一个轮廓线相交于一点,将这些点标记,此时,射线将该轮廓分为72等份,每一等份的角度为5
°
,此时所有标记点为初始点,空间划分结果如图6所示,所有初始点标记结果如图7所示,记所有初始点坐标为pi,i为当前初始点编号,i=1,2,3......72。
[0077]
步骤5:阈值约束规则;需要切割部位的轮廓半径长度随着角度的变化而急剧变化,根据轮廓半径长度,定义当前初始点与上一个初始点的轮廓半径长度的比值为当前初始点的轮廓半径增长率。最大轮廓半径增长率阈值η
max
与最小轮廓半径增长率阈值η
min
可根据毛皮种类和特征自定义修改,本文选取η
max
=110%,η
min
=90%;
[0078]
式中,η为当前点的轮廓半径增长率,ri为当前初始点的轮廓半径长度,r
i-1
为上一个初始点的轮廓半径长度,因为需要切割部位的轮廓半径增长率变化相对比较剧烈,因此根据此类特征可以设置相应的阈值进行筛选,让阈值范围内的初始点保留下来,将阈值范围外的初始点进行剔除,以便进行后续的图像处理;
[0079]
若此时列表p的长度len(p)为0,则进行步骤8);否则,由公式(4)计算轮廓半径增长率,进行步骤6)。
[0080][0081]
步骤6:最大阈值约束;若η≥η
max
,则调整交点pi的坐标为pi',pi'由公式(5)计算,重新计算交点pi与质心c的欧式距离,记为r',并将之放入列表r中,将交点pi放入列表p中,由公式(6)得出pi'的轮廓半径增长率,执行步骤8);若η<η
max
,则执行步骤7)。
[0082][0083]
式中pi'为新的标记点(该点替换掉了当前不符合阈值要求的初始点)的坐标,为顺时针旋转θ角度的变换矩阵,c为质心坐标,r'为待求选择点的轮廓半径,r
i-1
为前一个新标记点(或满足要求保留的初始点)的轮廓半径,η
max
为设置的最大阈值。由此公式能将当前的初始点替换成一个新的标记点,并令其满足阈值条件;
[0084][0085]
步骤7:最小阈值约束;若η≤η
min
,则令j=1,由公式(7)重新计算交点p
i-j
的坐标,重新计算交点p
i-j
与质心c的欧式距离,记为r
i-j
,当j=1时,将计算结果放入列表r和p中,当
j>1时,将列表r和p中原来的结果替换;令j=j+1,由公式(8)计算p
i-j
的轮廓半径增长率,若η≤η
min
,则重复步骤7)去判断p
i-j
的前一个初始点,否则,执行步骤8);
[0086][0087]
式中,p
i-j
为当前初始点的前j个初始点的坐标,j是初始值为1的循环递增变量,r
i-j-1
为初始点i前j+1个初始点的半径长度。
[0088][0089]
由以上公式能将当前初始点的前一个初始点替换成一个新的标记点,并令其满足阈值条件。图8所示为经过阈值约束调整后的轮廓点平面图。
[0090]
步骤8:空间遍历判定条件;判定是否θ≤θ
max
,若是,则令i=i+1,并执行步骤4);否则执行步骤9);
[0091]
步骤9:目标切割线连接;通过轮廓半径增量阈值约束规则,对超越阈值的交点进行处理使之满足阈值条件,满足阈值条件的最终所有交点即为最终的切割点,将所有满足要求的初始点和标记点记为最终点,并按照顺时针连线得出切割路径,此切割路径为最终的目标切割线。依次连接列表p中的坐标点,画出切割线。图9为基于最终点的轮廓切割线示意图。
[0092]
以上算法的核心是通过以毛皮轮廓质心为起点按照相同的间隔角度作射线,射线与轮廓点的交点的距离即为轮廓半径长度,以相邻交点的半径的比值计算半径增长率,通过设置增长率的最大与最小阈值,对超越阈值的交点进行处理使之满足阈值条件,最终所有保留的交点的连线为切割路径。不同形状大小的轮廓图像的最终提取结果如图10所示,大量的实验结果表明,本发明所提切割方法具备新颖性与有效性,能实现毛皮的图像切割并给出切割路径,从而满足后续毛皮自动化切割工业生产要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1