一种基于标定的图像自适应复原方法与流程
1.本发明涉及图像复原处理领域,具体为一种基于标定的图像自适应复原方法。
背景技术:
2.物空间一点经过理想光学成像系统所成的像仍是一点。而实际光学成像系统受几何像差和光学衍射极限的影响,图像不再是清晰完善像,存在一定的光学模糊。同时,成像过程中总是伴随着噪声信号,噪声主要来源于与光强相关的泊松噪声、电荷转移过程中引入的转移噪声、热激发在硅衬底产生的暗电流噪声、以及非均匀性噪声等。
3.这些因素导致了图像质量的下降,因此图像去噪和去糊是图像复原中非常重要步骤。图像去噪一般从图像的平滑性、频域的高频性及分布的随机性出发,构建相应的数学模型来去除噪声;图像去糊利用人类对清晰图像的认知,为退化模型添加先验进行模型求解,达到图像去模糊的功能。
4.当前绝大部分算法对图像处理都是人为给予某种假设,如噪声服从高斯分布或模糊核默认值,这会使得对于不同成像系统,图像复原效果不理想。
技术实现要素:
5.本发明的目的在于提供一种基于标定的图像自适应复原方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于标定的图像自适应复原方法,包括步骤:s1:噪声标定,对设定的靶标进行拍摄、保存,并进行噪声标定;s2:成像系统标定;s3:图像去噪处理;s4:图像去糊处理;s5:输出最终复原后的图像。
7.优选的,s1中噪声标定包括全局噪声标定、局部噪声标定,噪声标定具体步骤包括:s101:设定靶标,采用实际光学系统对靶标进行拍摄,保存拍摄图像;s102:选择两帧同一时刻相同场景的靶标图像;s103:计算全局图像噪声分布;s104:计算局部图像噪声分布。
8.优选的,s103中全局图像噪声分布计算过程具体包括:s103a:对两帧靶标图像进行差分运算,获得差值图像;s103b:对差值图像进行概率密度函数的分布拟合,确定其分布类型和具体参数值;s103c:将结果存入参数文件中。
9.优选的,s104中局部图像噪声分布计算过程具体包括:s104a:在靶标图像上截取n个不同灰度值的图像块,n默认为8;s104b:对各个图像块分别绘制直方图;s104c:再进行概率密度函数的分布拟合,确定其分布类型和具体参数值;s104d:对n个图像块结果取平均;s104e:将所有结果存入参数文件。
10.优选的,s2的成像系统标定过程具体包括:s201:选择一帧靶标图像;s202:截取图像中带有黑白斜边的区域roi;s203:将roi中不同行的数据顺序“投影”在相同像素格子上,得到边缘扩散函数esf;s204:对边缘扩散函数esf进行求导得到直线的变化率线扩散函数lsf;s205:将lsf进行傅里叶fft变换就得到各空间频率下的响应值sfr;s206:对sfr数据进行分析,获得成像系统模糊参数;s207:将结果存入参数文件中。
11.优选的,s3中图像去噪处理基于分布算法实现,分布算法包括但不限于中值滤波、非局部均值算法、r-l算法。
12.优选的,s4中图像去糊处理过程基于去糊算出实现,经去糊处理后的图片即为最终复原后的图像。
13.与现有技术相比,本发明的有益效果是:本发明通过当前光学系统进行噪声分布和成像系统标定,并将标定后的文件保存,应用到后续算法作为先验参数,根据噪声分布选择不同算法,能够使得去噪效果最佳;将成像系统标定的结果作为基于边缘去糊算法的初值,进一步提高盲去模糊的模糊核估计的正确性,进而能大大提升去糊效果。
附图说明
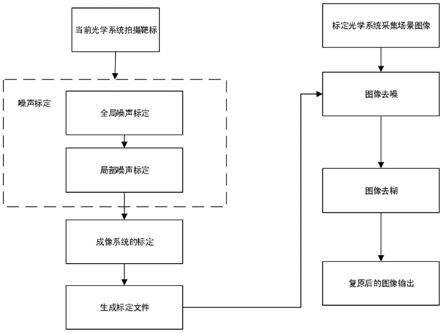
14.图1为本发明整体的流程框图;图2为本发明实施例中噪声标定的流程图;图3为本发明实施例中成像系统标定的流程图;图4为本发明实施例中图像去噪的流程图;图5为本发明实施例中图像去糊的流程图;图6为本发明实施例中标定靶标的示意图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.请参阅图1,本发明提供一种技术方案:一种基于标定的图像自适应复原方法,包
括步骤:s1:噪声标定,对设定的靶标进行拍摄、保存,并进行噪声标定(标定靶标如图6);s2:成像系统标定;s3:图像去噪处理;s4:图像去糊处理;s5:输出最终复原后的图像。
17.请参阅图2,在本实施例中,s1中噪声标定包括全局噪声标定、局部噪声标定,噪声标定具体步骤包括:s101:设定靶标,采用实际光学系统对靶标进行拍摄,保存拍摄图像;s102:选择两帧同一时刻相同场景的靶标图像;s103:计算全局图像噪声分布;s104:计算局部图像噪声分布。
18.在本实施例中,s103中全局图像噪声分布计算过程具体包括:s103a:对两帧靶标图像进行差分运算,获得差值图像;s103b:对差值图像进行概率密度函数的分布拟合,确定其分布类型和具体参数值;s103c:将结果存入参数文件中。
19.在本实施例中,s104中局部图像噪声分布计算过程具体包括:s104a:在靶标图像上截取n个不同灰度值的图像块,n默认为8;s104b:对各个图像块分别绘制直方图;s104c:再进行概率密度函数的分布拟合,确定其分布类型和具体参数值;s104d:对n个图像块结果取平均;s104e:将所有结果存入参数文件。
20.请参阅图3,在本实施例中,s2的成像系统标定过程具体包括:s201:选择一帧靶标图像;s202:截取图像中带有黑白斜边的区域roi;s203:将roi中不同行的数据顺序“投影”在相同像素格子上,得到边缘扩散函数esf;s204:对边缘扩散函数esf进行求导得到直线的变化率线扩散函数lsf;s205:将lsf进行傅里叶fft变换就得到各空间频率下的响应值sfr;s206:对sfr数据进行分析,获得成像系统模糊参数;s207:将结果存入参数文件中。
21.请参阅图4,在本实施例中,s3中图像去噪处理基于分布算法实现,分布算法包括但不限于中值滤波、非局部均值算法、r-l算法。
22.s3中具体包括步骤:s301:导入参数文件;s302:选择要处理的输入图像;s303:根据参数文件标定的噪声分布,进行自适应算法选择,算法提供自适应算法选择;算法包括:
a、中值滤波(椒盐噪声),中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,从而消除孤立的噪声点;b、非局部均值算法(高斯噪声),非局部均值算法为在一个目标像素周围区域平滑取均值的方法,所以非局部均值滤波就意味着它使用图像中的所有像素,这些像素根据某种相似度进行加权平均。滤波后图像清晰度高,而且不丢失细节;非局部均值算法使用自然图像中普遍存在的冗余信息来去噪声,与双线性滤波、中值滤波等利用图像局部信息来滤波不同,其利用了整幅图像进行去噪,即以图像块为单位在图像中寻找相似区域,再对这些区域取平均,较好地滤除图像中的高斯噪声;c、r-l算法(泊松噪声);s304:对输入图像进行处理;s305:输出处理后的图像,再进入图像去糊处理。
23.请参阅图5,在本实施例中,s4中图像去糊处理过程基于去糊算出实现,经去糊处理后的图片即为最终复原后的图像。
24.在本实施例中,s4中具体包括:s401:读取参数文件标定的成像系统模糊参数,构建成二维核函数;s402:把s401中获得的核,作为基于边缘去糊算法的初始值,开始图像去糊;s403:图像去糊后完成复原操作。
25.上述实施例通过对实际光学系统的噪声和模糊系数标定,进行参数化的数学建模,将标定结果应用到后续图像复原算法中,获得对于这套成像系统的最佳图像复原结果。
26.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1