基于高分辨率遥感影像的丘陵山区耕地宜机化确定方法与流程
1.本发明属于智慧种植领域,具体是一种基于高分辨率遥感影像的丘陵山区耕地宜机化确定方法。
背景技术:
2.目前,学界对耕地改造评价研究主要集中在高标准农田建设方面,包括建设前评估和建设后评价。在高标准农田建设前评估方面,主要从土地利用结构、农田空间格局、提高生产能力、土壤环境质量、人口社会因素以及地形条件等采集农田整治目标区域发展参数,综合分析高标准农田建设条件,测算新增耕地数量、耕地质量提升、粮食产能提升等耕地整治潜力,综合评价目标区域的整治难易程度,为耕地整治项目选址与优先序安排提供决策依据。在高标准农田建设后评价方面,更多关注耕地整治后生态环境效应,包括土壤理化性状变化、土壤养分变化、农田生态系统变化等,部分学者认为土地整治得土壤性状发生了较大的改变,尤其会加剧农田土壤理化性质区域性不平衡问题,但不平衡现象随时间迁移逐渐变小。农田整治会增加土壤养分的异质性,造成土壤ph、盐分和氮磷钾等不同程度的空间变异,会破坏原本稳定的农田生态系统,但耕地整治后的农田设施化水平将大幅提升,包括水利设施、生态防护条件、机耕道等基础设施。尚未查询到系统评价耕地宜机化水平的文献,对农田设施水平评价的文献也主要集中在水利设施方面,与宜机化相关的仅涉及机耕道通达性方面,对地块作业宜机化没有阐述。农田宜机化改造已经开始在部分丘陵山区试点,但由于缺乏相关评价方法与标准,不利于试点项目成果的推广应用。
技术实现要素:
[0003][0004]
本发明针对背景技术中存在的问题,提出一种基于高分辨率遥感影像的丘陵山区耕地宜机化确定方法。
[0005]
技术方案:
[0006]
一种基于高分辨率遥感影像的丘陵山区耕地宜机化确定方法,包括:
[0007]
计算目标区域的地块面积a、地块形状s、地块长宽比lw、地块高程差h四个数值;
[0008]
将四个数值分别与阈值比对获得地块面积指标ai、地块形状指标si、地块长宽比指标 lwi、地块高程差指标hi四个指标值;
[0009]
所有指标值均为1时确定为宜机化。
[0010]
具体的,它包括以下步骤:
[0011]
s1、获取目标地域的航空摄影数据;
[0012]
s2、使用数据处理软件,将航空摄影数据绘制为目标地域的地块封闭边界与其他地形要素的空间图形,填写相关属性,获得矢量属性表;
[0013]
s3、基于矢量属性表获取目标区域的地块面积a、地块形状s、地块长宽比lw、地块高程差h四个数值;
[0014]
s4、将四个数值分别与阈值比对获得地块面积指标ai、地块形状指标si、地块长宽比指标lwi、地块高程差指标hi四个指标值;
[0015]
s5、基于四个指标值输出目标地域的宜机化判定结果。
[0016]
具体的,s1中,航空摄影数据为lidar机载激光雷达数据生成的高精度dem数据。
[0017]
具体的,s2中,所述数据处理软件为arcgis。
[0018]
具体的,s2中,使用arcgis空间工作平台和空间分析工具,通过空间读取、空间叠加、空间分析的技术手段,绘制目标地域的地块封闭边界与其他地形要素的空间图形,填写相关属性,获得矢量属性表。
[0019]
具体的,s3中:
[0020]
地块面积a:基于矢量属性表获得每个地块的封闭矢量边界,利用arcgis的空间分析方法,计算每个封闭矢量边界内的面积,即为地块面积a;
[0021]
地块形状s:利用arcgis的空间分析手段,拟合得到地块封闭边界的最小外接矩形,并计算得到最小外接矩形面积a
mer
,然后计算地块面积a与其最小外接矩形面积a
mer
的比值,该比值称为地块的矩形度,即为地块形状s;
[0022]
地块长宽比lw:利用arcgis空间分析手段得到地块最小外接矩形的长度l与宽度w,计算最小外接矩形的长宽比,即为地块长宽比lw;
[0023]
地块高程差h:提出矢量属性表中每个绘制地块的面积,通过空间属性计算工具获取每个绘制地块最小外接矩形,套叠相应地区的dem数据,求出每个地块的平均高程,计算相邻地块之间的高程之差,获得地块高程差指标h。
[0024]
具体的,s4中,满足阈值要求的指标值编码为1,不满足阈值要求的指标值编码为0。
[0025]
具体的,s5中,所有指标值均为1时确定为宜机化。
[0026]
本发明的有益效果
[0027]
本发明从地块形状、面积、长宽比、高差与农机作业密切相关的4个维度选取地块宜机化评价指标,利用样本地区高分辨率遥感影像和高精度dem数据,基于arcgis绘制样本地区最小单元的地块边界,计算出耕地相关评价指标值,利用布尔型赋值方式和短板原理对样本地区耕地宜机化进行综合确定。
[0028]
本发明以样本地区采样视频数据为基础,进行数字化分析,客观判断出样本地区是否宜机化。相较传统的主观判断,更具高效性、科学性和准确性。本方法可用于高标准农田建设工程、农田宜机化改造工程项目评估,由于农田分布的广泛性,传统人工测绘方法工作量大、成本高,而采用本方法进行评估可有效减少野外作业工作量,降低工程项目前期投入成本,同时评价指标的科学设计保障了评估方法的科学性,arcgis技术和高分辨率遥感影像的应用也充分保障评估结果的准确性。
附图说明
[0029]
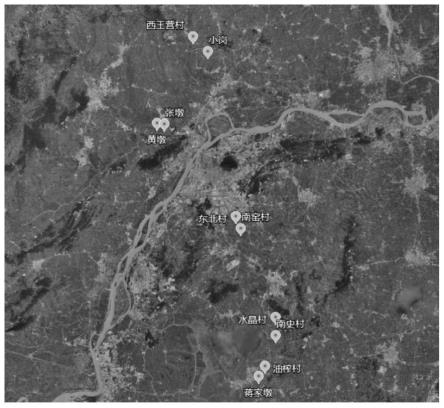
图1为实施例中抽样村分布图
[0030]
图2为实施例中部分抽样村地块分布情况图
具体实施方式
[0031]
实施例以南京为例对本发明方法做进一步说明,但本发明的保护范围不限于此:
[0032]
南京位于长江下游沿岸,北连江淮平原,东接长江三角洲,南京国土面积658,231.3公顷,农用地438039.0公顷,占国土面积66.5%。其中,耕地245593.1公顷,园地9404.1公顷,林地73927.9公顷,其他农用地109063.1公顷,分别占国土面积的37.31%、1.43%、 11.23%,16.57%。基本农田主要分布在六合、江宁、溧水、高淳、浦口五区,合计 220389.9hm2,占全市基本农田总面积的96.92%,其中六合和江宁区基本农田分布比重最大,
[0033]
(一)数据来源与处理方法
[0034]
实施例的研究数据主要来源于2018年覆盖南京全境的0.3米航空摄影数据(比例尺,1:500),由lidar机载激光雷达数据生成的高精度dem数据(采样间距2.5m)。数据处理软件为arcgis10.2,软件运行计算机配置为酷睿i7cpu、8g内存。在南京市六合区、浦口区、江宁区、高淳区、溧水区5个涉农区各随机抽取2个自然村,共计10个抽样村,具体抽样村分布如图1所示,抽样村耕地总体情况如表1所示。
[0035]
利用arcgis空间工作平台和空间分析工具,通过空间读取、空间叠加、空间分析等技术手段,分别绘制抽样村的地块封闭边界与其他地形要素的空间图形,填写相关属性,提出矢量属性表中每个绘制地块的面积,通过面积、长宽等相关空间属性计算工具和手段计算出每个绘制地块最小外接矩形,套叠相应地区的dem数据,通过纠正、平差等技术手段求出每个地块的平均高程。
[0036]
表1抽样村耕地总体情况
[0037][0038]
(二)评价指标
[0039]
农业农村部发布了《丘陵山区农田宜机化工作指引》,提出了丘陵山区耕地地块与机耕道的宜机化改造标准:1)地块形状:以长方形为原则;2)地块大小:短边长度5m以上,长宽比3-5:1,面积1亩以上。3)最大挖填高度:≤2m。4)整理后的地块生产路直接通达率100%。鉴于此,提出南京市耕地宜机化评价指标如下:
[0040]
1、地块面积指标(ai)。近年来,我国农业机械正在朝着大中型化发展,农机作业幅宽变大,地块面积过小,将影响农机转弯掉头灵便性,无法充分发挥大中型机具的效率优势。地块面积越大,农机作业效率越高。因此本文利用地块面积a的实测值来表征地块面积
宜机化程度。按照《丘陵山区农田宜机化工作指引》要求耕地面积应大于0.07公顷,抽样地块中面积大于667m2的地块数为910块,占总抽样地块数的87.5%。由于农业农村部颁布的《工作指引》更多是面向西南丘陵山区等地形条件更差的区域,相对而言,南京地形中平原占比较高,因此,南京地块面积限定值应更大,以南京保有量最大的联合收割机型作业幅宽 (3m)为基准,优化耕地参数可以满足收割机5个往返收割条幅,转弯性能不受限制。按照《指引》推荐的最大值确定南京地块面积参数,短边30m,长边150m,面积0.45公顷,地块面积指标ai值可由式(1)计算得到。
[0041][0042]
2、地块形状指标(si)。收割机直线行走时,操控简单,运转效率高,其运动轨迹与割幅构成矩形,因此,地块形状越接近矩形,农业机械作业效率越高。本文利用矩形度来表征地块形状的宜机化程度,矩形度r用地块面积a与其最小外接矩形面积a
mer
之比表示,如式(2)。
[0043][0044]
式中,r表示地块形状的矩形度;a表示地块实际面积,m2;a
mer
表示地块最小外接矩形面积,m2。矩形度取值范围为0《r≤1,当地块形状为矩形时,r=1;当地块形状越不规则时,r取值越小。耕地矩形度应越接近越好,但由于部分地形改造为矩形地块难度较大,丛文杰(2017)对江苏地区农地进行抽样调查发现,江苏地块矩形度以不小于0.75为宜
[31]
。地块形状指标si值可由式(3)计算得到。
[0045][0046]
3、地块长宽比指标(lwi)。耕地宽度必须不小于农机作业幅宽,农机才能下地作业。农机掉头转弯的次数与耕地的宽度正相关。由于掉头转弯时无法形成有效作业,因此,农机作业效率损失环节主要在转弯掉头阶段。当地块长宽比越大时,转弯掉头时间占总作业时间比重越小,农机作业效率损失也越小。由于耕地形状复杂,部分地块更无法找到长度与宽度,因此,为便于度量,本文利用地块最小外接矩形的长宽比lw来表征地块长宽比宜机化程度。《指引》提出地块长宽比不应低于3:1,地块长宽比指标lwi值可由式(4)计算得到。
[0047][0048]
4、地块高程差指标(hi)。地形不平整是丘陵山区典型特征,分布在此类地形条件下的水田表现为不同地块不在同一海拔高度,相邻地块之间有高差,影响农业机械田间转移效率,甚至对农机户生命财产安全造成威胁。因此,本文利用地块平均高程差h来表征地块高程差,如式(5)。
[0049][0050]
式中,hi表示第i个抽样区地块平均高程差,m;al
imax
表示第i个抽样区地块最大高程, m;al
im.n
表示第i个抽样区地块最小高程,m;mi表示第i个抽样区最大高程与最小高程地块之间间隔地块数量。陈聪等(2015)认为田间高差小于0.5m的条件下,所有机型履带式联合收割机均可顺畅完成田间转移
[34]
。因此,地块高程差指标hi值可由式(6)计算得到。
[0051][0052]
(三)布尔赋值综合评价体系
[0053]
以地块为评价基本单元,依上述选取的地块形状、地块面积、地块长宽比、地块高程差等4个指标逐个排序,采取4位编码方式自左向右逐个赋值给田块的各评价指标,其中每位编码代表相应评价指标的指标值。利用短板原理进行综合维度评价,当且仅当评价田块的4 位编码值全都为1时,表征目标地块满足宜机化要求;反之,评价地块在面积、形状等某个或多个方面存在不足,不能全部满足宜机化要求。基于此,建立耕地宜机化评价的编码值体系,用于从多维度分析耕地的宜机化程度(详见表2)。
[0054]
表2耕地宜机化综合评价指标编码值及含义
[0055][0056]
(四)耕地宜机化评价结果
[0057]
(4-1)抽样耕地数据总体分布
[0058]
将抽样村影像数据载入arcgis中,每个村连片绘制出一定数量的地块边界,由arcgis 识别出地块高程,计算出耕地面积,详见图2。
[0059]
图2为p1、p2、p3抽样村地块分布情况,图中单个封闭图形单元为一个地块,地块中标注的数据为其高程数据,图中底色变化规律为高程越高,所在区域颜色越深。
[0060]
表3抽样村地块宜机化总体情
[0061][0062]
由表3可以看出,抽样村农田总体上在地块面积、形状和长宽比方面没有达到宜机
化标准,高程差可以满足宜机化要求。
[0063]
(4-2)耕地宜机化评价结果
[0064]
通过布尔赋值综合评价方法计算得到抽样村每个地块的评价值,详见表4。
[0065]
表4抽样村农田宜机化评价结果
[0066][0067]
从地块面积来看,1040个地块中,168个地块面积不低于0.45hm2,占总地块的 16.15%,主要分布在南部茅山附近的蒋家墩村和油榨村,少量分布在中部的东北村。从地块形状来看,148个地块矩形度不小于0.75,占总地块的14.23%,主要分布在六合区的小岗村和西王营村。从地块长宽比来看,46个地块长宽比不小于3:1,占总地块的4.42%,主要分布在江宁区的南窑村。从地块高程差来看,602个地块高程差小于0.5m,占总地块的57.88%.
[0068]
从综合评价来看,1040个地块中完全实现“宜机化”(编码为1111)地块数为0;完全不宜机(编码为0000)的地块数为288,占总地块的27.69%;宜机化水平25%(编码值 0001/0100/1000)的地块数为551,占总地块的52.98%;宜机化水平50%(编码值 0011/0101/0110/1001/1100)的地块数为174,占总地块的16.73%;宜机化水平75%(编码值0111/1101)的地块数为27,占总地块的2.60%。
[0069]
利用本发明所描述的技术,测算了南京市丘陵山区粮田宜机化改造规模和分布情况,并依据测算结果制定了南京市丘陵山区粮田宜机化改造指引,将由南京市农业农村局公开发布。
[0070]
本文中所描述的具体实施例仅仅是对本发明精神做举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1