一种基于虚幻引擎的空间目标数据集构建方法
一种基于虚幻引擎的空间目标数据集构建方法
【技术领域】
1.本发明属于空间目标智能识别技术领域,尤其涉及智能识别所需仿真数据集,具体是一种基于虚幻引擎建立空间场景并构建空间目标数据集的方法。
背景技术:
2.随着世界各国对空间环境的不断重视,空间态势感知的重要性日渐上升。针对以卫星为主的重要空间目标的攻击、保护和在轨服务已成为世界各国航天技术的重要发展方向,而卫星特征部件(如帆板、天线)的识别技术是其中的关键环节。空间目标识别主要是利用空间目标特性数据,对其身份、姿态和状态等属性进行有效判断和识别。目前国内外在天基目标探测识别的研究大多集中在远距离情况下的点目标探测,针对卫星本体、太阳帆板等重要部件的识别方面研究相对较少。近年来,以深度学习为代表的人工智能算法蓬勃发展。目标检测、语义分割等关键技术已被成功应用于多个领域,这给空间目标识别带来了新的技术突破。
3.然而由于缺乏训练使用的空间目标数据集,将深度学习应用于航天器智能识别的研究还相对较少。国内外学者一般采用真实图片和仿真图片两种思路,其中,真实图片卫星细节度高,而且常带有地球背景,但是其数量较少,难以满足深度学习需要大量数据集的要求。因此一些学者基于stk等软件仿真卫星运行于地球轨道,截取图片建立卫星数据集,但是受限于卫星和地球的建模质量,构建的卫星图片与真实图片相差较大。使用此种仿真图片训练完成的深度学习算法难以应用于真实在轨卫星识别。因此有必要研究较为真实的、数量较大的空间目标数据集构建方法,克服真实图片数量较少和仿真图片真实度较低的缺点。
4.虚幻引擎(unreal engine)是一款功能强大的游戏开发引擎,具有十分逼真的场景开发能力。因此可以基于虚幻引擎软件建立空间场景,通过导入卫星几何模型的方式模拟卫星在轨运行,批量生成空间目标数据集,为后续基于深度学习方法对航天器特征部件识别提供数据支撑。
技术实现要素:
5.(一)发明的目的
6.本发明克服现有卫星数据集背景单一、数量较少的不足之处,提供了一种基于虚幻引擎的空间目标数据集构建方法,提供大规模的、背景丰富,与真实航天器运行相似度较高的卫星图片以供航天器特征部件智能识别。
7.(二)本发明的技术方案
8.步骤一、卫星几何建模
9.基于三维建模软件blender,参照卫星结构图、尺寸图和示意图建立精细的卫星几何模型,严格按照尺寸建立卫星高增益天线、低增益天线、太阳帆板、星上载荷(例如高分辨率镜头、太阳传感器电子设备、惯性测量装置等)等卫星组件,并将各组件按照卫星结构图
拼接起来。对各结构施加位移约束,限制其自由移动;施加旋转约束,限制其自由旋转;施加力约束固定各组件位置,例如将低增益天线通过铰链、力约束固定在高增益天线中央;将太阳帆板固定在卫星本体上。
10.建立完卫星组件,随后对各个组件添加材料属性。从nasa官网、satellite tool kit(stk)等官方途径搜集整理卫星模型图片。对比卫星图片,为前述建立的卫星部件添加材质贴图,即通过把二维材质图片覆盖在三维组件上,使卫星各部件颜色、纹理贴合真实模型图片。
11.细化修改模型差异部分,对材质为金属的部件,设置表面金属度、高光、光泽、糙度为0.5。真实卫星帆板表面纹理丰富,而通过材质贴图的方式帆板表面较为光滑,因此再次对帆板表面纹理细化,将原本整体、光滑的太阳帆板,细化为与真实模型相似度较高的纹理丰富的帆板。本发明共建立30颗种类不同的卫星,将模型保存成obj格式文件备用。
12.步骤二、空间场景建模
13.虚幻引擎4(unreal engine 4)是一款功能强大的游戏开发引擎,因此本发明基于虚幻4建立空间仿真场景。首先在虚幻4界面左侧放置工具栏中选择球体,设置球体圆心位于(0,0,0),代表地球。通过虚幻4工具栏中蓝图选项新建地球蓝图,虚幻引擎中的蓝图可以理解为一种可视化的编程方式,蓝图集成了多个可直接添加的模块,类似“添加本地旋转(addlocalrotation)”模块,只需在蓝图界面以连线的方式将该模块与所选物体连接起来,即可实现物体旋转起来。因此本发明通过蓝图编辑器建立白天夜晚、云层、极光等地球空间场景可能出现的模块。在地球蓝图中通过虚幻4自带的功能模块和函数的方式,设计整个空间场景功能。可通过分模块设计的方式,在云层、极光等模块中设计所需功能,例如云层移动速度、强度、亮度等参数。分别建立完成各模块,再集成到地球球体上。
14.下面以地球表面建立为例,说明蓝图实施路径。首先在蓝图编辑器中新建地球纹理(包含白天和夜晚)、云层、极光、银河等模块,将各纹理模块与地球球体连接起来,实现将纹理覆给地球。但此时并未选择具体的纹理贴图,纹理指以类似地图的方式,将原本三维的地球变成二维纹理图像,因此重新将二维纹理贴合在球体上,即在虚幻4中建立了三维的地球。通过网络途径获取到地球白天、夜晚、以及各个时间段的云层分布纹理。将纹理分别添加到所建立的模块中,即初步实现了地球表面、大气等的建立。但此时纹理相对粗糙,因此需要更精细的调整纹理所占的比例,例如通过蓝图编辑器中的“multiply”模块,系数设置为0.5,将白天和夜晚纹理连接至“multiply”模块,此时白天和夜晚纹理将各占地球一半;可通过“添加本地旋转”模块设置云层纹理随时间旋转,旋转参数可自由指定,数值越大旋转速度越快,模拟地球表面大气流动。将建立好的各模块连接至地球,此时仍可在连接线上添加功能,例如在云层与地球的连线上设置“multiply”模块,设为0.5,表明云层模块整体在地球表面的强度,若设置为0,则云层不出现。
15.通过以上方式,本发明最终在蓝图界面构建模块包含以下功能:云层模块可设置云的强度、高度、旋转速度、对比度、颜色。地球白天夜晚模块可设置白天灯光强度、夜晚灯光强度(指人类建筑物发出的灯光在太空中的可见强度)、夜晚灯光颜色。极光模块可设置极光有无、极光强度、极光颜色、极光位置等。
16.以类似地球球体的方式建立太阳球体,区别在于太阳球体并不需要指定具体的纹理。由于太阳距离地球较远,因此在虚幻4中选择定向光源模拟太阳光,将定向光源移动至
太阳球体球心,调整定向光源半径和太阳球体一致,这样整个太阳球体作为光源。调整该定向光源的强度、颜色等属性模拟太阳光源,使其效果更加真实。最后对空间背景添加星空纹理和银河纹理,模拟星空环境。
17.最终建立的空间场景包含地球及地球表面的大气层、云层变化、极地极光变化,包含太阳和星空背景。对比真实地球近地场景,不断调整各参数使得仿真场景尽可能真实。
18.步骤三、空间目标图像生成
19.将步骤一中建立好的空间卫星模型导入到步骤二中建立的空间场景中,通过虚幻4自带的模型导入工具即可实现将obj或fbx格式文件导入。
20.模型以蓝图的形式导入,不需要像步骤二中手动添加。在模型蓝图的蓝图编辑器中添加“本地旋转”模块,输入旋转参数,例如可设置卫星x轴旋转参数为2,设置y轴旋转参数为3,则表示卫星每帧绕x轴旋转2度,绕y轴旋转3度。蓝图中添加“事件tick”模块,该模块每帧触发一次,将其与“本地旋转”连接,此时卫星将在窗口界面不断旋转,模拟卫星在轨运行姿态。
21.通过虚幻4界面左侧放置工具栏中,添加电影摄像机actor,移动摄像机使卫星模型进入摄像机视角,模拟真实在轨拍摄卫星状态。
22.通过虚幻4界面上部工具栏中过场动画选项中添加关卡序列,关卡序列选项是虚幻引擎4中制作视频的工具。在关卡序列中选择前述所建立的电影摄像机,表明将以本摄像机视角建立动画视频。将此视频输出即可获取卫星在轨运行仿真视频,视频中卫星以本步骤设定的旋转参数逐帧旋转。将该视频导入到matlab软件中对视频进行处理,每隔3至10帧截取卫星在轨运行的图像并保存。
23.步骤一共建立了30颗卫星几何模型,可分别导入到空间场景中,获得多种类卫星图像。调整本步骤中卫星旋转参数(例如自由设置x、y、z三轴旋转参数),则可获得卫星绕三轴旋转的多姿态图像。手动移动摄像机位置和卫星在摄像机视角中的位置,例如将卫星从地球赤道附近移动到极地;将卫星从摄像机中央移动到画面右上角;将摄像机从低轨拍高轨,调整至高轨拍低轨,从而可获得背景多样的卫星图像。
24.综上,步骤三可获得多卫星种类、多姿态、背景多样的大规模空间目标图像数据集。
25.步骤四、空间目标图像标注
26.使用开源标注软件labelme标注步骤三中构建的大量空间目标图像,即卫星运行于近地轨道的多姿态仿真图片。对仿真图片沿特征部件边界以点连线,再成面的形式精细描绘出卫星的特征部件轮廓。本发明涉及太阳帆板、天线、光学载荷、推进系统四种特征部件,描绘轮廓时参考步骤一建立卫星模型时的结构图。标注完步骤三中全部的空间目标图像,获得可使用的卫星图像特征部件语义分割数据集的标签图。标签图和原始空间目标图像即为本发明构建的空间目标数据集,其中标签图带有对应图片的特征部件名称和形状。
27.步骤五、卫星特征部件智能识别
28.基于改进deeplabv3+语义分割算法对步骤四中标注好的空间目标数据集进行训练。将标签图依次送入神经网络训练,神经网络学习到各标签的形状等特征信息,不断迭代神经网络中的权重参数。在原始deeplabv3+网络中仿照人类视觉系统添加注意力机制,对输入的仿真图片,着重关注于卫星及其附近的信息,提高对小目标的识别能力。添加特征增
强网络减小因全局平均池化而导致的空间信息不一致,提高网络的特征提取性能。
29.经过训练后的神经网络学习到了卫星特征部件的特征信息。随后对空间目标数据集进行测试,输入测试图片,语义分割网络将测试图片中卫星的天线、帆板等特征部件以不同颜色准确区别开来,证明本发明构建空间目标数据集的有效性和本数据集应用于卫星智能识别的有效性。
30.(三)本发明的优点和功效
31.本发明所述空间目标数据集构建方法能够较真实地模拟地球临近空间场景。本发明建立了表面细节丰富,相对真实且种类较多的卫星几何模型。相比于基于stk等软件的图片仿真方法,本方法对地球和太阳做了相对真实的建模,模拟了地球表面云层、极光的变化。获取的仿真图片较好地模拟了卫星在地球轨道运行时的状态,与真实卫星差别较小。本发明所述方法可导入不同卫星几何模型、设置不同旋转参数、可调整相机位置和视角,从而获取多种类卫星、卫星多姿态、不同地球、太阳、云层角度的空间目标数据集。输出卫星在轨运行视频并逐帧处理的方式可快速生成大量数据集,满足深度学习训练需求。
32.本发明构建数据集与真实卫星在轨运行图像对比相似度较高,克服了现有数据集背景单一、地球和卫星建模细节较差地不足之处。基于本发明所构建地数据集满足深度学习需求,可实现对空间目标智能识别,区分其天线、帆板、推进系统等特征部件。同时由于本发明生成的空间图像相对真实,因此使用该数据集训练好的神经网络,具备应用到真实航天目标的可能。
【附图说明】
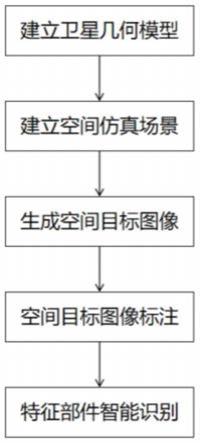
33.图1为本发明的流程图。
34.图2a-图2f为本发明建立的部分卫星几何模型示例。
35.图3a、图3b为本发明建立的卫星几何模型与真实卫星对比示意图。
36.图4为本发明建立的空间仿真场景。
37.图5为本发明建立的地球材质。
38.图6为本发明建立的卫星运行于空间场景示意。
39.图7a、图7b为本发明构建的空间目标图像与真实卫星图像对比示意。
40.图8为本发明空间目标图像特征部件标注示意。
41.图9为本发明采用的改进deeplabv3+算法流程图。
42.图10a-图10f为本发明构建数据集的卫星特征部件识别结果。
【具体实施方式】
43.下面结合附图1-10对本发明做进一步详述。
44.基于虚幻引擎的空间目标数据集构建方法流程图,如图1所示。
45.步骤一:卫星几何建模
46.基于三维建模软件blender建立卫星各个组件,包括卫星本体、天线、帆板、推进系统、光学载荷、成像光偏振计、磁强计等星敏感器。构建约束将卫星各组件在本体坐标系中拼接起来,限制卫星组件旋转、平移,并将各组件通过施加力约束的方式固定位置。以图2a,acrimsat卫星为例,首先在blender软件中建立卫星本体,随后建立四块太阳帆板,依据结
构图建立卫星本体上的天线、传感器和acrim设备。通过建立连杆将太阳帆板与卫星本体连接起来,通过施加力约束将天线等组件固定在卫星本体上。卫星建模结果如图2所示。
47.在blender软件中选择材料属性,新建材质。在“基础色”选项中选择打开图像,将二维的材质贴图贴合在建立的三维卫星模型组件上,此时所选组件将被材质图像覆盖。部分材质贴图来源于nasa官网。卫星通常不会涉及过多颜色,常用颜色包括金色(gold)、银色(silver)、黑色(black),对各个组件都添加材质贴图,初步获得带有颜色、纹理的卫星几何模型。
48.对比模型与真实图片差异,对材质为金属的组件,调整其表面金属度、高光、光泽为0.5。不同卫星帆板纹理各不相同,通过材质贴图的方式会使得卫星帆板十分光滑,与真实情况不符,因此对卫星模型帆板进一步细化。手动分割原本光滑的帆板,获得表面纹理丰富的卫星太阳帆板,例如图2a、图2f中卫星帆板。
49.本发明共建立30颗卫星几何模型,卫星名称见表1,包括旅行者一号(voyager-1)、罗塞塔号(rosetta)、钱德拉x射线天文台(chandra)、卡西尼惠更斯号(cassini)等卫星。本发明建立的空间目标数据库用到所有卫星,部分卫星几何模型示例如图2a-图2f所示,图2a-图2f分别为acrimsat、aquarius、chandra、clementine、deep impact、juno卫星。卫星几何模型与真实卫星图片对比示意如图3a、图3b所示,图3a为本发明建立的voyager-1模型,图3b为nasa官网给出的voyager-1图片。本发明建立卫星模型与真实模型相似度较高,卫星细节相对丰富,将卫星模型保存为obj格式备用。
50.表1本发明建立卫星模型库名称
51.aquaaquariusauracassinichandraclementinecloudsatdawndeepimpactdeep spaceibexicesatjunokeplerlandsatlromagellanmars-global-surveyormavenmessengermronearpioneerrosettatdrsterrathemistopexulyssesvoyager-1
52.步骤二:空间场景建模
53.基于虚幻4中建立空间场景如图4所示,包括地球、太阳、星空背景、地球表面大气、云层、光照、极光的设计等。虚幻4整个界面包括5个部分,下面结合图4详细说明空间场景建模过程。
54.以地球建立步骤为例说明:
55.(1)首先在界面左侧3号方框的位置,选择几何体中的球体,拖动至中央5号方框,调整右侧4号方框中的位置,设置球体圆心位于(0,0,0),即坐标系原点,建立地球;
56.(2)其次在1号方框工具栏界面中选择蓝图选项,新建地球蓝图。虚幻引擎4中蓝图是一种可视化编程方式,只需将集成好的模块添加到蓝图,即可实现相对复杂的功能。本发明采用分模块设计,通过虚幻4中的蓝图编辑器分别建立白天、夜晚、大气、云层、极光各模块,在各模块中设置对应内部功能。最终将各模块集成于地球球体,设计整个空间场景功能,包括地球表面纹理(纹理具体指地球表面大陆、海洋、冰层等二维图片)、大气云层、极光等功能,以及对应各功能的强度、位置、移动速度、颜色等属性。
57.(3)以白天夜晚为例说明模块建立过程。第(1)步建立好的地球并不带有颜色和地
球表面本该有的大陆海洋等细节。因此通过网络搜集地球表面的纹理贴图,将图4中2号方框中的纹理贴图(即将原本地球三维图像投影成二维图片,再贴合到三维地球中,即实现了将纹理包裹在地球上)一一连接到蓝图编辑器中的白天夜晚模块,此时各纹理相对独立,因此需要设计纹理之间的关系。由于虚幻4中采用可视化编程方式,因此可以较为方便的设置各纹理的功能。例如添加“multiply”模块,并设置系数为0.5,将白天夜晚纹理分别连接至multiple,即可获得各一半的白天黑夜纹理,再通过“add”模块将白天黑夜纹理相加,再连接至地球,此时就实现了白天黑夜纹理各占地球一半,以此模拟地球白天黑夜变化。最简单的白天黑夜变化需要白天黑夜纹理各一张、两个multiply模块并设置为0.5、一个add模块就可以实现。图4中2号方框有许多不同的白天黑夜纹理,通过设置这些纹理的出现与否、不同占比即可实现对不同时间的地球表面细节的建立。通过虚幻4中功能模块的叠加、组合、连接即可实现复杂的功能。
58.(4)大气、云层和极光模块的建立与白天夜晚模块类似,首先连接大气云层纹理,随后通过蓝图编辑器中可视化模块和函数设置纹理分布、高度、强度、对比度、旋转速度等参数;极光模块涉及极光位置、强度、高度、颜色等参数,在此不一一列举数值,各参数可根据需要实时调整,模拟更加真实的地球。
59.(5)分别建立各白天夜晚、大气云层等模块,在各模块中设计完对应功能,最终与地球球体相连,即完成了地球的建立。完整的地球材质示意如图5所示。
60.(6)太阳的建立与地球类似。首先建立太阳球体,不需要对太阳指定具体的纹理。在图4方框3光源一栏中选择定向光源,并将该定向光源移动至太阳球体球心,半径调整为与太阳球体一致,这样太阳将作为发光球体存在于空间场景中。调整太阳球体位置,使其远离地球。调整定向光源的强度、颜色等属性使其更加效果更加真实。
61.(7)同地球纹理添加方法,在蓝图编辑器中对整个场景覆盖星空和银河纹理。
62.(8)最终建立的空间场景包含太阳、地球、星空背景。可模拟地球表面大气云层变化、极地极光变化、地球自转等场景。
63.步骤三、空间目标图像生成
64.(1)在虚幻4中选择文件——导入到关卡中,将步骤一保存好的obj格式文件以蓝图形式导入到虚幻4建立的空间场景关卡中。
65.(2)编辑第(1)步生成的蓝图,在视口界面设置变换选项为可移动。步骤一中按照真实卫星几何尺寸建模,但是步骤二中空间场景并不是真实地球大小,因此按照步骤二中地球与真实地球比例系数对卫星整体进行缩放。
66.(3)步骤二中介绍了虚幻4高度集成的模块化编程,因此在蓝图事件图表中,只需“添加本地旋转”和“事件tick”两个模块即可实现卫星旋转。“本地旋转”中包含三个参数,分别为x、y、z三轴角度。“事件tick”每帧触发一次,因此将“事件tick模块”连接到“本地旋转”模块,再连接至卫星本体,此后卫星每帧旋转此前设置的x、y、z三轴角度,模拟卫星在轨运行状态。设置不同的x、y、z角度,可实现卫星不同的旋转姿态。
67.(4)通过图4左侧3号方框过场动画中虚幻4提供的相机组件,添加电影摄像机actor,手动调整摄像机视角,聚焦到卫星。此时卫星在场景中如图6所示。
68.(5)图4上部1号方框工具栏,过场动画选项中,选择添加关卡序列制作动画。在关卡序列“+轨道”中选择第(4)步所建立的摄像机,此时将以所选摄像机视角制作动画。可自
由调整序列显示率,也就是视频帧率,在此设置为60fps。可自定义分辨率,在此选择1920
×
1080。最终选择“将此影片渲染为视频”选项,即可输出卫星在轨运行视频。视频中卫星以第(3)步旋转参数和第(4)步摄像机所处视角不断旋转,伴随着地球自转,以此模拟卫星运行于轨道时的情形。
69.(6)图4中部5号方框右上角工具条可实现对所选物体进行平移、旋转和缩放操作。因此可以手动调整摄像机位置、距卫星的距离(也可以通过调整摄像机焦距来改变卫星在视角中大小);调整卫星几何模型的位置、手动旋转卫星、或调整第(3)步中的卫星蓝图旋转参数等多种方式批量获得不同角度、不同距离、不同背景的卫星在轨运行视频。
70.(7)将第(6)步获得的视频导入到matlab软件中进行处理,逐帧读取图片,获得大量卫星运行于空间仿真场景的数据集图片。由于在第(3)步中设置了卫星按帧旋转,因此第(7)步可获得卫星多旋转角度图片。
71.(8)此外,除了输出视频的方式,对于少量卫星图片,也可以直接通过虚幻4中5号方框视口界面的高分辨率截图选项对卫星截图。手动移动或旋转卫星位置,获取卫星数据集。图7a、图7b为本发明构建的空间目标图像与真实在轨拍摄卫星图像对比示意图,其中图7a为nasa官网展示国际空间站图像,图7b为本发明构建空间目标图像。
72.步骤四、空间目标图像标注
73.基于开源标注软件labelme标注步骤三生成的空间目标图像。将图片导入labelme,创建特征部件名称,也就是标签名称。本发明在步骤一建立的卫星模型包含天线、帆板等相对较大的部件,也包含星敏感器等体积较小的部件,在此只对体积较大的特征部件进行标注。在导入的图像中,单击鼠标可形成标注原点,点击另一点即可自动形成两点之间连线,沿着特征部件边界单击,最后再回到标注原点即可形成封闭曲面。以点成线再成面的方式勾勒出卫星的太阳帆板、天线、光学载荷(相机镜头、镜筒)等特征部件轮廓。图8为一张tdrs卫星的标注结果图片,带有背景、帆板(panel)、天线(antenna)三个标签,标签给出帆板和天线的形状。标签图和对应的卫星图片组成本发明构建的空间目标数据集。
74.步骤五、卫星特征部件智能识别
75.基于改进的deeplabv3+语义分割算法训练标注好的空间目标数据集。将步骤四中标注好的标签图送入神经网络,神经网络学习到不同标签的形状、大小等特征信息,不断迭代权重。训练完成后的神经网络可实现对输入卫星图片的特征部件进行识别,将各特征部件以不同的颜色分割出来。
76.为了提高网络的特征提取性能,提升网络识别准确度,在原始deeplabv3+网络中添加注意力机制,包含空间注意力(compact position attention module,cpam)和通道注意力(compact channel attention module,ccam),提高对重点区域,也就是卫星的关注度,提升小目标识别效果。在网络中添加特征增强模块(feather enrichment module),利用包含位置信息的低层特征、丰富细节的高层特征和经过空洞空间卷积池化金字塔后的多尺度空间信息,三者融合形成更精细的特征,从而有效提升网络性能。改进后的deeplabv3+网络如图9。
77.实验平台为linux ubuntu 16.04系统上基于pytorch深度学习框架。训练使用4块nvidia 1080ti gpu。学习率策略采用poly策略。设置训练初始学习率设置为0.001,学习率衰减步数设为2000,学习率衰减因子为0.1;迭代步数设置为30000;批量大小(batch size)
为8;输出步长(output_stride)设置为8,优化算法为sgd,动量(momentum)设置为0.9,权重衰减(weight decay)为4e-5。以上参数均为deeplabv3+网络常用设置参数,本发明并未过多对参数进行调整。
78.部分卫星的识别结果如图10a-图10f所示,(a)和(b)是near卫星,(c)为aqua卫星,(d)为cassini卫星,(e)和(f)为tdrs卫星。卫星的天线、帆板等大型特征部件被识别出来。采用平均交并比(miou)作为评价准则评价特征部件的识别效果,平均交并比计算真实值和预测值的交集和并集之比,其表达式为:
[0079][0080]
共有k+1个类(包含一个背景类),p
ij
表示本属于类i但被预测为类j的像素数量。p
ii
表示预测正确的数量,而p
ij
和p
ji
则分别被解释为假负例和假正例。
[0081]
或者利用混淆矩阵解释为
[0082][0083]
其中,tp(true positive)即正确的目标被正确的识别,fp(false positive)为误报,即正确的目标被错误的识别,fn(false negatives)为漏报,即正确的目标没有被识别到。miou即把每一类的iou取平均值。该数值越高表明模型识别越精确,数值为1时表明全部像素点均识别正确。本发明模型识别精度见表2:
[0084]
表2网络识别iou结果
[0085] 帆板天线光学载荷推进系统mioudeeplabv3+0.93420.87710.91610.85610.9159
[0086]
综上,本发明构建的空间目标数据集卫星模型建模相对准确,细节丰富(对比图3a和图3b)。相比于stk等软件建立了丰富、真实的地球近地空间环境。卫星模型运行于仿真环境从而生成的卫星图片与真实图片相似度较高。通过标注所构建的空间目标数据集,采用改进deeplabv3+算法实现了对卫星特征部件的识别。
[0087]
本发明构造的数据集图片(图4、图6、图7b、图10a-f)与真实图像(图7a)匹配度较高,克服了现有数据集背景单一、建模细节较差的缺点。
[0088]
以上所述仅是本发明的具体实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明方法的前提下,还可以做出若干改进,或者对其中部分技术特征进行等同替换,这些改进和替换也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1