一种基于车道线的俯仰角校准方法及可读存储介质与流程
1.本发明涉及计算机视觉技术领域,具体涉及一种基于车道线的俯仰角校准方法及可读存储介质。
背景技术:
2.在自动驾驶领域,车辆行驶过程中车载相机的俯仰角变化,会导致车道线在鸟瞰图中重建位置不精准,从而增加车辆冲出车道的风险。因此,如何快速有效地对车载相机俯仰角进行校准,成为本领域的重要研究方向。
3.目前,现有技术已经对车载相机俯仰角的校准进行了广泛研究,其中,基于消失点计算车辆俯仰角的方法已非常成熟。例如,公开号为cn110386142a的中国专利就公开了《用于自动驾驶车辆的俯仰角校准方法》,其方法包括:基于对象的图像确定对象的二维边界框以及从自动驾驶车辆到对象的感知距离;在对象的图像空间内,基于二维边界框以及从自动驾驶车辆到对象的感知距离,通过至少修改先前的外在校准值来搜索动态俯仰角,以计算距离值;基于所搜索的动态俯仰角确定从自动驾驶车辆到自动驾驶车辆的视角图的地面上的点的距离。
4.上述现有方案中的俯仰角校准方法假设车道线平行,并依据平行直线在成像画面上的消失点与相机焦点的连线平行于路面计算出俯仰角。申请人发现,在俯仰角校准过程中,消失点的准确性直接影响俯仰角校准的精度。但是,现有俯仰角校准方法在获取消失点时需要假设车道线平行,然而,车载相机感知到的车道线并不总是平行的,部分车道线是具有一定弧度的曲线。因此,现有俯仰角校准方法获取得到的消失点并不准确,进而导致俯仰角校准的准确性不高。因此,如何设计一种能够获取更稳定消失点的俯仰角校准方法是亟需解决的技术问题。
技术实现要素:
5.针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种基于车道线的俯仰角校准方法,以能够获取更稳定的消失点,从而提高车载相机俯仰角校准的准确性。
6.为了解决上述技术问题,本发明采用了如下的技术方案:
7.一种基于车道线的俯仰角校准方法,包括以下步骤:
8.s1:设置n个采样等级,各个采样等级对应车道线在x方向的不同坐标值;
9.s2:在各个采样等级下分别计算各对相邻车道线之间的消失点,并构成消失点集合;
10.s3:通过中值滤波,从消失点集合中选取最终消失点;
11.s4:基于最终消失点计算对应的俯仰角。
12.优选的,步骤s1中,先对车道线进行筛选,删除长度不满足条件的车道线。
13.优选的,步骤s1中,当第i条车道线满足时,保留第i条车道线;否则
删除第i条车道线;
14.其中,x
imax
表示第i条车道线在x方向的坐标最大值;表示所有车道线在x方向坐标最大值的平均值;δ
x
表示设置的车道线筛选变量。
15.优选的,步骤s1中,基于所有车道线在x方向坐标最大值的平均值设置对应的采样等级。
16.优选的,步骤s1中,设置三个采样等级,分别是车道线在x方向坐标值为和的采样等级。
17.优选的,步骤s2中,通过如下步骤构成消失点集合:
18.s201:初始化车道线序号i=0,采样等级n=0;
19.s202:车道线序号为i上取其起始点与采样等级n在x方向的坐标值构成直线l
ni
,车道线序号为i+1上取其起始点与采样等级n在x方向的坐标值构成直线l
ni+1
;
20.s203:计算直线l
ni
与l
ni+1
的交点pv作为对应的消失点,并放入消失点集合vs中;
21.s204:若i<i
max
,则执行i=i+1,并返回步骤s202;否则执行i=0,n=n+1,并进入步骤s205;
22.s205:若n>n
max
,则停止并输出消失点集合vs;否则返回步骤s202。
23.优选的,步骤s3中,在消失点集合vs中,对消失点在x方向的坐标值进行排序,并将x方向的坐标值中值x
vm
对应的消失点(x
vm
,y
vm
)作为最终消失点。
24.优选的,步骤s4中,通过公式fcosθd+x
vm sinθd=0计算俯仰角θd;
25.其中,f表示焦距;(x
vm
,y
vm
)表示最终消失点的坐标。
26.优选的,步骤s4中,若俯仰角θd满足|θ
d-θs|<δ
θ
,则俯仰角θd可信;否则俯仰角θd不可信;
27.其中,θs表示静态俯仰角,δ
θ
表示设置的俯仰角波动范围量。
28.本发明还公开了一种可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现本发明的基于车道线的俯仰角校准方法的步骤。
29.本发明的俯仰角校准方法与现有技术相比,具有如下有益效果:
30.本发明设置车道线在x方向的不同坐标值的不同采样等级,并在不同采样等级下遍历每一对车道线的消失点以生成消失点集合,再采用中值滤波的方式从消失点集合选取最终消失点,进而通过最终消失点计算车载相机的俯仰角,使得能够获取更稳定的消失点,从而能够提高车载相机俯仰角校准的准确性。
附图说明
31.为了使发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
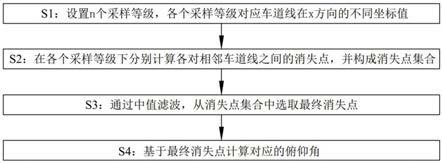
32.图1为基于车道线的俯仰角校准方法的逻辑框图;
33.图2为筛选车道线的示意图;
34.图3为生成消失点集合的示意图;
35.图4为生成消失点集合的流程图;
36.图5为中值滤波选取最终消失点的示意图。
具体实施方式
37.下面通过具体实施方式进一步详细的说明:
38.实施例一:
39.本实施例中公开了一种基于车道线的俯仰角校准方法。
40.如图1所示,基于车道线的俯仰角校准方法,包括以下步骤:
41.s1:设置n个采样等级,各个采样等级对应车道线在x方向的不同坐标值;
42.s2:在各个采样等级下分别计算各对相邻车道线之间的消失点,并构成消失点集合;
43.s3:通过中值滤波,从消失点集合中选取最终消失点;
44.s4:基于最终消失点计算对应的俯仰角。
45.需要说明的是,本发明的基于车道线的俯仰角校准方法可通过程序编程的方式生对应的成软件代码或软件服务,进而能够在服务器和计算机上运行和实施。
46.本发明设置车道线在x方向的不同坐标值的不同采样等级,并在不同采样等级下遍历每一对车道线的消失点以生成消失点集合,再采用中值滤波的方式从消失点集合选取最终消失点,进而通过最终消失点计算车载相机的俯仰角,使得能够获取更稳定的消失点,从而能够提高车载相机俯仰角校准的准确性。
47.具体实施过程中,如图2所示,先对车道线进行筛选,删除长度不满足条件的车道线(长度过短的车道线)。当第i条车道线满足时,保留第i条车道线;否则删除第i条车道线;其中,x
imax
表示第i条车道线在x方向的坐标最大值;表示所有车道线在x方向坐标最大值的平均值;δ
x
表示设置的车道线筛选变量。
48.本发明通过对车道线进行筛选,删除长度不满足条件的车道线,使得能够排除不合格的车道线,从而能够提高消失点集合中消失点的质量。
49.具体实施过程中,基于所有车道线在x方向坐标最大值的平均值设置对应的采样等级。设置三个采样等级,分别是车道线在x方向坐标值为和的采样等级。
50.具体实施过程中,如图3和图4所示,通过如下步骤构成消失点集合:
51.s201:初始化车道线序号i=0,采样等级n=0;
52.s202:车道线序号为i上取其起始点与采样等级n在x方向的坐标值构成直线l
ni
,车道线序号为i+1上取其起始点与采样等级n在x方向的坐标值构成直线l
ni+1
;
53.s203:计算直线l
ni
与l
ni+1
的交点pv作为对应的消失点,并放入消失点集合(交点集合)vs中;
54.s204:若i<i
max
,则执行i=i+1,并返回步骤s202;否则执行i=0,n=n+1,并进入步骤s205;
55.s205:若n>n
max
,则停止并输出消失点集合vs;否则返回步骤s202。
56.本发明通过在不同采样等级下遍历每一对车道线的消失点,能够生成消失点集合,进而能够辅助获取更稳定的消失点,从而能够提高俯车载相机仰角校准的准确性。
57.具体实施过程中,如图5所示,在消失点集合vs中,对消失点在x方向的坐标值进行
排序,并将x方向的坐标值中值x
vm
对应的消失点(x
vm
,y
vm
)作为最终消失点。
58.本发明通过中值滤波的方式,能够有效的从消失点集合中获取更稳定的消失点,从而能够提高俯车载相机仰角校准的准确性。
59.具体实施过程中,通过公式fcosθd+x
vm sinθd=0计算俯仰角θd;其中,f表示焦距;(x
vm
,y
vm
)表示最终消失点的坐标。若俯仰角θd满足|θ
d-θs|<δ
θ
,则俯仰角θd可信;否则俯仰角θd不可信(此时将静态俯仰角θs作为输出);其中,θs表示静态俯仰角(已知),δ
θ
表示设置的俯仰角波动范围量。
60.本发明能够基于最终消失点准确的计算俯仰角,并且能够验证俯仰角是否可信,从而能够提高俯车载相机仰角校准的准确性。
61.实施例二:
62.本实施例中公开了一种可读存储介质。
63.一种可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现本发明的基于车道线的俯仰角校准方法的步骤。可读存储介质可以是u盘或计算机等具有可读存储功能的设备。
64.最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1