一种基于像素提取的矩形标志位的检测方法与流程
1.本发明属于计算机图像处理技术领域,尤其涉及一种基于像素提取的矩形标志位的检测方法。
背景技术:
2.伴随着计算机技术和光学扫描的发展,智能化自动录入答卷也越来越普及。其中智能化录入答卷通常伴随着一系列的问题,例如扫描颠倒,倾斜等。在答卷上加入标志位是一种有效解决上述问题的办法。通过对于关键标志位的检测,可以判断答卷的方向,角度并矫正和还原答卷。
3.一般标志位的检测是通过计算机图像技术检测特殊颜色的矩形框,获取到矩形框的位置和大小等信息。传统的方法存在两个弊端,第一个弊端是需要答卷的标志位为特殊的颜色,这对于印刷和扫描的需求较高,对于使用者存在一定的门槛,可兼容性较差。第二个弊端是答卷的标志位周围要尽量保持整洁,不能存在污迹,涂改,但是这些噪声影响可能是学生在答卷过程中不可避免所造成的,尤其是低年级的学生,这在一定程度上降低了程序的稳定性(图2所示)。
技术实现要素:
4.本发明要解决的技术问题是提供一种基于像素提取的矩形标志位检测方法,不仅可以检测灰度印刷的标志位,而且可以在标志位有一定干扰的情况下进行准确的检测。
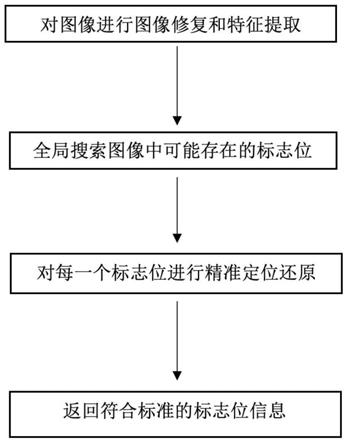
5.为了解决上述技术问题,本发明采用的技术方案是:该基于像素提取的矩形标志位的检测方法,具体包括以下步骤:
6.s1:对采集的图像进行图像修复和特征提取,获得平均池化的特征图;
7.s2:对步骤s1中获得的平均池化的特征图利用图像特征进行全局标志位模糊搜索,获得图像中可能存在的所有的标志位;
8.s3:对图像中获取的每一个标志位进行精准定位还原;
9.s4:返回符合标准的标志位信息。
10.采用上述技术方案,首先获取试卷的扫描图像文件,对图形进行特征提取,然后利用图像特征进行全局标志位模糊搜索,搜索到多个可能的标志位信息,接着对于每个标志位信息进行局部精准提取和坐标还原,最后返回每个黑色矩形标志位的位置信息和大小信息,该基于像素提取的矩形标志位的检测方法不仅符合智能阅卷的需求,而且还可以适用于不同的场景,提高程序的稳定性和可扩展性。
11.作为本发明的优选技术方案,所述步骤s1的具体步骤为:
12.s11:对采集的图像全局二值化处理,再检测所述图像的轮廓,并进行空洞填充,最终得到修复后的图像;
13.s12:接着对步骤s11中修复后的图像进行平均池化处理,提取图像的像素亮度的特征图。
14.作为本发明的优选技术方案,所述步骤s2的具体步骤为:
15.s21:根据步骤s12中得到的平均池化的特征图再进行一次图像轮廓的检测,对于符合条件一的轮廓,记作内轮廓集合in_counters;
16.s22:再对步骤s11中得到的修复后图像进行一次图像轮廓的检测,记作外轮廓集合out_counters;
17.s23:对外轮廓集合和内轮廓集合中进行轮廓匹配,获得的匹配结果则为由多个内轮廓和外轮廓组成的二维集合。这些组合为可能存在的标志位,将在后续的步骤中被更精确的计算还原。
18.作为本发明的优选技术方案,所述步骤s21中的所述条件一为:轮廓需满足轮廓中黑色像素占比大于95%;所述步骤s23中的轮廓匹配采用循环匹配的方法,循环内轮廓集合in_counters中的每一个内轮廓,判断该内轮廓对应的外轮廓在坐标位置上是属于外轮廓集合out_counters的哪一个外轮廓的,每一个内轮廓都会找到唯一的一个外轮廓,最终得到由多个内轮廓和外轮廓组成的二维集合。轮廓的宽和轮廓的高的阈值需要根据黑色方块标志位的大小进行设置,一般的黑色方块经过上述的池化之后,应该满足宽大于7,高大于2。符合此条件一的轮廓一定是黑色方块的一部分,但可能因为平均池化的原因,并不完整。其中in_counters是多个内轮廓的集合,记作:[in_counter_1,in_counter_2,in_counter_3,
……
,in_counter_n]。其中out_counters是多个外轮廓的集合,记作:[out_counter_1,out_counter_2,out_counter_3,
……
,out_counter_m]。其中轮廓匹配是一种循环匹配的方法,需要循环in_counters中的每一个轮廓,判断该轮廓在坐标位置上是属于out_counters的哪一个外轮廓的,每一个内轮廓都会找到唯一的一个外轮廓,最终组成多个内轮廓和外轮廓的二维集合:[[in_counter_i1,out_counter_j1],[in_counter_i2,out_counter_j2],[in_counter_n,out_counter_m]]。
[0019]
作为本发明的优选技术方案,所述步骤s3的具体步骤为:根据步骤s3中获得由多个内轮廓和外轮廓组成的二维集合,对由多个内轮廓和外轮廓组成的二维集合中的每一个内轮廓和外轮廓进行精准的定位还原。
[0020]
作为本发明的优选技术方案,所述步骤s3的具体步骤为:
[0021]
s31:通过二分查找方法生成新的内轮廓和外轮廓,并提取内轮廓和外轮廓的长宽二分值,以长宽二分值的大小生成二分值轮廓;
[0022]
s32:若二分值轮廓内的黑色像素的占比大于设定的阈值,则用二分值轮廓替代内轮廓,否则就用二分值轮廓替代外轮廓;直至内轮廓和外轮廓逐渐大小相等,此时的轮廓为最大黑色方块轮廓,则为精准的黑色方块;
[0023]
s33:循环步骤s31~s32,获得由多个内轮廓和外轮廓组成的二维集合中的每一个内轮廓和外轮廓结合对应的黑色方块,即获得每个符合标志位大小的黑色方块信息。
[0024]
作为本发明的优选技术方案,所述步骤s4的具体步骤为:根据步骤s33中获得的每个符合标志位的大小的黑色方块信息,再结合初始设置的标志位信息进行判断检测结果的位置是否为标志位,若黑色方块信息的大小与位置均符合位置标准,则返回该标志位信息;否则结束。在试卷中可能存在着和标志位一样大小的黑框,所以要根据初始设置的标志位信息来判断检测结果是否是标志位;例如初始设置的标志位只存在于图像的四个角,那么检测到的其他位置的标志位虽然符合大小标准,但是不符合位置标准,程序只返回同时符
合位置和大小标准的标志位信息。
[0025]
作为本发明的优选技术方案,所述步骤s11中全局二值化处理时设定的全局阈值为100,将大于100的像素群像素值设定为255,将小于128的像素群像素值设定为0。其中检测图像轮廓是一种针对数字化二值图像的拓扑分析方法,可以确定二值图像边界之间的环绕关系,是一种成熟现有的方法。
[0026]
作为本发明的优选技术方案,所述步骤s11中的空洞填充是对于图像轮廓较小且像素值为255的区域的值转为0。
[0027]
作为本发明的优选技术方案,所述步骤s12中平均池化处理的具体过程为:将待处理的修复后的图像按照固定大小的网格分割,每隔一定的步长取网格内所有像素的平均值,并使用它来创建一个下采样的特征映射。平均池化提取特征较为平滑,可以提取一定像素范围内的平均特征分布。
[0028]
作为本发明的优选技术方案,所述固定大小的网格的长为20像素,宽为20像素,步长为7个像素。
[0029]
与现有技术相比,本发明具有的有益效果为:该基于像素提取的矩形标志位的检测方法不仅可以检测灰度印刷的标志位,而且可以在标志位有一定干扰的情况下进行准确的检测;不仅符合智能阅卷的需求,而且还可以适用于不同的场景,提高程序的稳定性和可扩展性。
附图说明
[0030]
下面结合附图进一步描述本发明的技术方案:
[0031]
图1是本发明的基于像素提取的矩形标志位的检测方法的流程图;
[0032]
图2是本发明的基于像素提取的矩形标志位的检测方法的背景技术中的普通矩形标志位和含噪声标志位对比图(图2a为标准标志位,图2b和图2c为含噪声标志位);
[0033]
图3是本发明的基于像素提取的矩形标志位的检测方法的空洞填充效果图(图3a是原图,图3b是修复之后效果图)。
具体实施方式
[0034]
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
[0035]
实施例:如图1所示,该基于像素提取的矩形标志位的检测方法,具体包括以下步骤:
[0036]
s1:对采集的试卷图像(可通过扫描仪进行扫描,或通过拍照进行图像修复和特征提取,获得平均池化的特征图;
[0037]
所述步骤s1的具体步骤为:
[0038]
s11:对采集的图像全局二值化处理,再检测所述图像的轮廓,并进行空洞填充,最终得到修复后的图像;如图3所示;所述步骤s11中全局二值化处理时设定的全局阈值为100,将大于100的像素群像素值设定为255,将小于128的像素群像素值设定为0;其中检测图像轮廓是一种针对数字化二值图像的拓扑分析方法,可以确定二值图像边界之间的环绕关系,是一种成熟现有的方法;所述步骤s11中的空洞填充是对于图像轮廓较小且像素值为
255的区域的值转为0;
[0039]
s12:接着对步骤s11中修复后的图像进行平均池化处理,提取图像的像素亮度的特征图;所述步骤s12中平均池化处理的具体过程为:将待处理的修复后的图像按照固定大小的网格分割,每隔一定的步长取网格内所有像素的平均值,并使用它来创建一个下采样的特征映射;平均池化提取特征较为平滑,可以提取一定像素范围内的平均特征分布;所述固定大小的网格的长为20像素,宽为20像素,步长为7个像素。
[0040]
s2:对步骤s1中获得的平均池化的特征图利用图像特征进行全局标志位模糊搜索,获得图像中可能存在的所有的标志位;所述步骤s2的具体步骤为:
[0041]
s21:根据步骤s12中得到的平均池化的特征图再进行一次图像轮廓的检测,对于符合条件一的轮廓,记作内轮廓集合in_counters;记作:[in_counter_1,in_counter_2,in_counter_3,
……
,in_counter_n];
[0042]
所述步骤s21中的所述条件一为:轮廓需满足轮廓中黑色像素占比大于95%;符合此条件一的轮廓一定是黑色方块的一部分,但可能因为平均池化的原因,并不完整,轮廓的宽和轮廓的高的阈值需要根据黑色方块标志位的大小进行设置,一般的黑色方块经过上述的池化之后,应该满足宽大于7,高大于2;
[0043]
s22:再对步骤s11中得到的修复后图像进行一次图像轮廓的检测,记作外轮廓集合out_counters;记作:[out_counter_1,out_counter_2,out_counter_3,
……
,out_counter_m];
[0044]
s23:对外轮廓集合和内轮廓集合中进行轮廓匹配,获得的匹配结果则为由多个内轮廓和外轮廓组成的二维集合。这些组合为可能存在的标志位,将在后续的步骤中被更精确的计算还原;
[0045]
所述步骤s23中的轮廓匹配采用循环匹配的方法,循环内轮廓集合in_counters中的每一个内轮廓,判断该内轮廓对应的外轮廓在坐标位置上是属于外轮廓集合out_counters的哪一个外轮廓的,每一个内轮廓都会找到唯一的一个外轮廓,最终得到由多个内轮廓和外轮廓组成的二维集合;
[0046]
其中in_counters是多个内轮廓的集合,记作:[in_counter_1,in_counter_2,in_counter_3,
……
,in_counter_n];其中out_counters是多个外轮廓的集合,记作:[out_counter_1,out_counter_2,out_counter_3,
……
,out_counter_m];其中轮廓匹配是一种循环匹配的方法,需要循环in_counters中的每一个轮廓,判断该轮廓在坐标位置上是属于out_counters的哪一个外轮廓的,每一个内轮廓都会找到唯一的一个外轮廓,最终组成多个内轮廓和外轮廓的二维集合:[[in_counter_i1,out_counter_j1],[in_counter_i2,out_counter_j2],[in_counter_n,out_counter_m]];
[0047]
s3:对图像中获取的每一个标志位进行精准定位还原;所述步骤s3的具体步骤为:根据步骤s23中获得由多个内轮廓和外轮廓组成的二维集合,对由多个内轮廓和外轮廓组成的二维集合中的每一个内轮廓和外轮廓进行精准的定位还原;所述步骤s3的具体步骤为:
[0048]
s31:通过二分查找方法生成新的内轮廓和外轮廓,并提取内轮廓和外轮廓的长宽二分值,以长宽二分值的大小生成二分值轮廓;
[0049]
s32:若二分值轮廓内的黑色像素的占比大于设定的阈值,则用二分值轮廓替代内
轮廓,否则就用二分值轮廓替代外轮廓;直至内轮廓和外轮廓逐渐大小相等,此时的轮廓为最大黑色方块轮廓,则为精准的黑色方块;
[0050]
s33:循环步骤s31~s32,获得由多个内轮廓和外轮廓组成的二维集合中的每一个内轮廓和外轮廓结合对应的黑色方块,即获得每个符合标志位大小的黑色方块信息;
[0051]
s4:返回符合标准的标志位信息。
[0052]
所述步骤s4的具体步骤为:根据步骤s33中获得的每个符合标志位的大小的黑色方块信息,再结合初始设置的标志位信息进行判断检测结果的位置是否为标志位,若黑色方块信息的大小与位置均符合位置标准,则返回该标志位信息;否则结束。在试卷中可能存在着和标志位一样大小的黑框,所以要根据初始设置的标志位信息来判断检测结果是否是标志位;例如初始设置的标志位只存在于图像的四个角,那么检测到的其他位置的标志位虽然符合大小标准,但是不符合位置标准,程序只返回同时符合位置和大小标准的标志位信息。
[0053]
对于本领域的普通技术人员而言,具体实施例只是对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1