一种信号同步方法及系统与流程
1.本发明涉及光电技术领域,特别是一种信号同步方法及系统。
背景技术:
2.光电跟踪系统能够对目标进行捕获、自动闭环跟踪并输出跟踪目标信息,在军事、安防等领域得到广泛应用。光电跟踪系统的性能直接影响应用效果,只依靠内场仿真或者外场试验手段对光电跟踪系统进行性能测试具有较大局限性。
3.可以基于实物和图像注入仿真两种方式对待追踪目标进行跟踪,图像信号处理单元可以对待跟踪目标的真实图像或仿真系统进行处理。但是,光电跟踪系统在实物和图像注入仿真两种方式下的工作状态有可能不一致,有可能带来光电跟踪系统不稳定的问题。现有技术中没有将实物和图像注入仿真两种方式结合起来的工作方式。即现有技术中的光电跟踪系统只包括图像信号处理单元、伺服控制单元和图像仿真注入单元,或者只包括图像信号处理单元、伺服控制单元和光电成像单元(跟踪转台系统)。因此,如何将实物和图像注入仿真两种方式结合起来,保证系统稳定性是目前亟待解决的问题。
技术实现要素:
4.本发明针对现有技术中存在的上述不足,提供一种高集成度毫米波相控阵天线单元。
5.第一方面,本发明实施例提供一种信号同步方法,包括:
6.图像信号处理单元响应于接收到图像仿真注入单元发送的待跟踪目标的第一仿真图像,对所述第一仿真图像进行目标检测处理,生成第一控制指令,并将所述第一控制指令发送至伺服控制单元;或,所述图像信号处理单元响应于接收到光电成像单元发送的待跟踪目标的第一真实图像,对所述第一真实图像进行目标检测处理,生成第二控制指令,并将所述第二控制指令发送至伺服控制单元;
7.所述伺服控制单元响应于接收到所述第一控制指令或所述第二控制指令,根据所述第一控制指令或所述第二控制指令完成跟踪转台控制响应。
8.在一些实施例中,图像信号处理单元接收图像仿真注入单元发送的第一仿真图像或光电成像单元发送的第一真实图像之前,包括:
9.所述图像信号处理单元生成固定频率的同步信号,并将所述同步信号同时发送至所述伺服控制单元和所述光电成像单元。
10.在一些实施例中,图像信号处理单元将同步信号同时发送至伺服控制单元之后,图像信号处理单元接收图像仿真注入单元发送的待跟踪目标的第一仿真图像之前,还包括:
11.所述伺服控制单元响应于接收到所述同步信号,确定当前跟踪转台角度信息,并将所述当前跟踪转台角度信息发送至图像仿真注入单元;
12.所述图像仿真注入单元根据所述当前跟踪转台角度信息确定待跟踪目标的第一
仿真图像。
13.在一些实施例中,伺服控制单元将所述当前跟踪转台角度信息发送至图像仿真注入单元之后,包括:
14.所述图像仿真注入单元根据所述当前跟踪转台角度信息生成待跟踪目标的第二仿真图像,所述第二仿真图像为当前帧仿真图像,所述第一仿真图像为前一帧仿真图像。
15.在一些实施例中,图像信号处理单元将同步信号同时发送至光电成像单元之后,图像信号处理单元接收光电成像单元发送的待跟踪目标的第一真实图像之前,包括:
16.所述光电成像单元响应于接收到所述同步信号,确定待跟踪目标的第一真实图像,并将所述第一真实图像发送至所述图像信号处理单元。
17.在一些实施例中,图像信号处理单元将同步信号同时发送至光电成像单元之后,图像信号处理单元接收光电成像单元发送的待跟踪目标的第一真实图像之前,还包括:
18.所述光电成像单元响应于接收到所述同步信号,生成待跟踪目标的第二真实图像,所述第二真实图像为当前帧真实图像,所述第一真实图像为前一帧真实图像。
19.第二方面,本发明实施例提供一种信号同步系统,包括:图像信号处理单元和伺服控制单元;
20.图像信号处理单元,用于响应于接收到图像仿真注入单元发送的待跟踪目标的第一仿真图像,对所述第一仿真图像进行目标检测处理,生成第一控制指令,并将所述第一控制指令发送至伺服控制单元;或,所述图像信号处理单元响应于接收到光电成像单元发送的待跟踪目标的第一真实图像,对所述第一真实图像进行目标检测处理,生成第二控制指令,并将所述第二控制指令发送至伺服控制单元;
21.伺服控制单元,用于响应于接收到所述第一控制指令或所述第二控制指令,根据所述第一控制指令或所述第二控制指令完成跟踪转台控制响应。
22.在一些实施例中,所述图像信号处理单元还用于生成固定频率的同步信号,并将所述同步信号同时发送至所述伺服控制单元和光电成像单元。
23.在一些实施例中,信号同步系统还包括:图像仿真注入单元;
24.所述伺服控制单元,还用于响应于接收到所述同步信号,确定当前跟踪转台角度信息,并将所述当前跟踪转台角度信息发送至图像仿真注入单元;
25.所述图像仿真注入单元,用于根据所述当前跟踪转台角度信息确定待跟踪目标的第一仿真图像。
26.在一些实施例中,信号同步系统还包括:光电成像单元;
27.所述光电成像单元响应于接收到所述同步信号,确定待跟踪目标的第一真实图像,并将所述第一真实图像发送至所述图像信号处理单元。
28.本发明实施例中,通过图像信号处理单元接收真实图像、接收仿真图像及图像处理、伺服控制单元跟踪转台控制响应的时序设计,实现光电跟踪系统在实物与图像注入仿真两种不同方式下闭环跟踪的信号同步。保证系统在两种方式下均能稳定工作,工作在同一个同步信号状态下,提高了两种方式下系统工作状态的一致性,从而提高两种方式互相对比验证的有效性。
附图说明
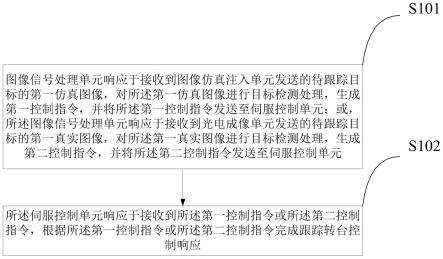
29.图1为本发明实施例提供的信号同步方法的流程图;
30.图2为本发明实施例提供的实物方式下信号同步系统内各信号时序示意图;
31.图3为本发明实施例提供的图像注入仿真方式下信号同步系统内各信号时序示意图;
32.图4为本发明实施例提供的信号同步系统内各单元的信号传输示意图。
33.附图标记:
34.1、图像信号处理单元;2、伺服控制单元;3、图像仿真注入单元;4、光电成像单元。
具体实施方式
35.在下文中将参考附图更充分地描述示例实施例,但是所述示例实施例可以以不同形式来体现且不应当被理解为限于本文阐述的实施例。反之,提供这些实施例的目的在于使本发明透彻且完整,并将使本领域技术人员充分理解本发明的范围。
36.在不冲突的情况下,本发明实施例及实施例中的各特征可相互组合。
37.如本文所使用的,术语“和/或”包括一个或多个相关列举条目的任何和所有组合。
38.在本文所使用的术语仅用于描述特定实施例,且不意欲限制本发明。本发明所使用的,单数形式“一个”和“该”也意欲包括复数形式,除非上下文另外清楚指出。还将理解的是,当本说明书中使用术语“包括”和/或“由......制成”时,制定存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或添加一个或多个其它特征、整体、步骤、操作、元件、组件和/或其群组。
39.除非另外限定,否则本文所用的所有术语(包括技术和科学术语)的含义与本领域普通技术人员通常理解的含义相同。还将理解,诸如那些在常用字典中限定的那些术语应当被理解为具有与其在相关技术以及本发明的背景下的含义一致的含义,且将不理解为具有理想化或过度形式上的含义,除非本文明确如此限定。
40.在光电跟踪系统设计时,要考虑如何保证系统在两种方式下均能稳定工作,并且工作状态具有一致性,从而提高两种方式互相对比验证的有效性。为使本领域的技术人员更好的理解技术方案,下面结合附图对本发明提供的一种信号同步方法及系统进行详细描述。
41.第一方面,本发明实施例提供一种信号同步方法。图1为本发明实施例提供的信号同步方法的流程示意图。如图1所示,本实施例提供的信号同步方法,基于一种信号同步系统实现,包括以下步骤。
42.步骤s101,图像信号处理单元响应于接收到图像仿真注入单元发送的待跟踪目标的第一仿真图像,对所述第一仿真图像进行目标检测处理,生成第一控制指令,并将所述第一控制指令发送至伺服控制单元;或,所述图像信号处理单元响应于接收到光电成像单元发送的待跟踪目标的第一真实图像,对所述第一真实图像进行目标检测处理,生成第二控制指令,并将所述第二控制指令发送至伺服控制单元;
43.步骤s102,所述伺服控制单元响应于接收到所述第一控制指令或所述第二控制指令,根据所述第一控制指令或所述第二控制指令完成跟踪转台控制响应。
44.在步骤s101-步骤s102中,图像信号处理单元可以接收光电成像单元发送的待跟
踪目标的第一真实图像,以使信号同步系统工作在实物方式下;也可以接收图像仿真注入单元发送的待跟踪目标的第一仿真图像,以使信号同步系统工作在图像注入仿真方式下。在任一方式下,当有图像发送给图像信号处理单元时,图像信号处理单元开始接收图像。图像信号处理单元在接收完一帧图像后对接收图像进行目标检测处理,得到图像处理结果(检测到目标以及目标离图像中心的角度偏差),根据图像处理结果生成相应的伺服控制指令,并给伺服控制单元发送相应的伺服控制指令。伺服控制单元在接收完伺服控制指令后,根据伺服指令控制跟踪转台转动,完成对图像处理结果的控制响应。
45.本发明实施例中,在实物和图像注入仿真两种方式下,信号同步系统的图像信号处理单元均对接收图像进行处理,向伺服控制系统发送相应的伺服控制指令,驱动跟踪转台转动将目标拉至图像中心,实现目标的自动闭环跟踪。区别在于,在实物方式下图像信号处理单元接收的是光电成像单元的第一真实图像,在图像注入仿真方式下图像信号处理单元接收的是图像仿真注入单元的第一仿真图像。
46.通过图像信号处理单元接收真实图像、接收仿真图像及图像处理、伺服控制单元跟踪转台控制响应的时序设计,实现光电跟踪系统在实物与图像注入仿真两种不同方式下闭环跟踪的信号同步。保证系统在两种方式下均能稳定工作,工作在同一个同步信号状态下,提高了两种方式下系统工作状态的一致性,从而提高两种方式互相对比验证的有效性。
47.在一些实施例中,图像信号处理单元接收图像仿真注入单元发送的第一仿真图像或光电成像单元发送的第一真实图像之前,包括:
48.所述图像信号处理单元生成固定频率的同步信号,并将所述同步信号同时发送至所述伺服控制单元和所述光电成像单元。
49.在该步骤中,图像信号处理单元能够使用晶振时钟生成固定频率的同步信号(同步信号的形式为一定宽度的脉冲信号,以脉冲上升沿或下降沿作为同步起始时刻),作为整个信号同步系统工作的基准同步信号,并将其同时发送给伺服控制单元和光电成像单元。
50.在一些实施例中,图像信号处理单元将同步信号同时发送至伺服控制单元之后,图像信号处理单元接收图像仿真注入单元发送的待跟踪目标的第一仿真图像之前,还包括:
51.所述伺服控制单元响应于接收到所述同步信号,确定当前跟踪转台角度信息,并将所述当前跟踪转台角度信息发送至图像仿真注入单元。
52.所述图像仿真注入单元根据所述当前跟踪转台角度信息确定待跟踪目标的第一仿真图像。
53.在上述步骤中,伺服控制单元以接收到的同步信号作为触发信号,在同步起始时刻开始发送当前跟踪转台角度信息给图像仿真注入单元。第一仿真图像为前一帧仿真图像,图像仿真注入单元能够以跟踪转台角度信息作为发送前一帧仿真图像的触发信号。
54.需要说明的是,因为当前跟踪转台角度信息是伺服控制单元按照同步信号固定时刻发送的,与同步信号具有同步关系,故图像仿真注入单元不需要接收同步信号,只要以接收到的当前跟踪转台角度信息作为发送前一帧仿真图像的触发信号。在接收完当前跟踪转台角度信息后开始发送前一帧仿真图像给图像信号处理单元。如图2所示,伺服控制单元经过一定延迟时间后向图像仿真注入单元发送当前跟踪转台角度信息。
55.在一些实施例中,伺服控制单元将所述当前跟踪转台角度信息发送至图像仿真注
入单元之后,包括:
56.所述图像仿真注入单元根据所述当前跟踪转台角度信息生成待跟踪目标的第二仿真图像,所述第二仿真图像为当前帧仿真图像。
57.在该步骤中,图像仿真注入单元能够以跟踪转台角度信息作为生成当前帧仿真图像的触发信号。
58.需要说明的是,因为跟踪转台角度信息是伺服控制单元按照同步信号固定时刻发送的,与同步信号具有同步关系,故图像仿真注入单元不需要接收同步信号,只要以接收到的当前跟踪转台角度信息作为生成当前帧仿真图像的触发信号(如图2所示)。在接收完当前跟踪转台角度信息后开始生成当前帧仿真图像。
59.在一些实施例中,图像信号处理单元将同步信号同时发送至光电成像单元之后,图像信号处理单元接收光电成像单元发送的待跟踪目标的第一真实图像之前,包括:
60.所述光电成像单元响应于接收到所述同步信号,确定待跟踪目标的第一真实图像,并将所述第一真实图像发送至所述图像信号处理单元。
61.在该步骤中,所述光电成像单元能够以同步信号作为发送前一帧真实图像的触发信号,所述第一真实图像为前一帧真实图像。
62.在一些实施例中,图像信号处理单元将同步信号同时发送至光电成像单元之后,图像信号处理单元接收光电成像单元发送的待跟踪目标的第一真实图像之前,还包括:
63.所述光电成像单元响应于接收到所述同步信号,生成待跟踪目标的第二真实图像,所述第二真实图像为当前帧真实图像。
64.在该步骤中,光电成像单元能够以同步信号作为生成当前帧真实图像的触发信号。第二真实图像为真实红外图像。
65.在一种优选的实施方式中,如图3所示,光电成像单元以接收到的同步信号作为触发信号,在同步起始时刻开始生成当前帧真实图像,并且在同步起始时刻后一段固定延迟时间开始发送前一帧真实图像给图像信号处理单元。
66.本发明实施例中,图像信号处理单元生成固定频率的同步信号并将其发送给伺服控制单元和光电成像单元。伺服控制单元接收同步信号后发送当前跟踪转台角度信息给图像仿真注入单元。光电成像单元接收同步信号后生成当前帧真实图像,并发送前一帧真实图像给图像信号处理单元;图像仿真注入单元接收当前跟踪转台角度信息后生成当前帧仿真图像,并发送前一帧仿真图像给图像信号处理单元。图像信号处理单元接收光电成像单元发送的前一帧真实图像或图像仿真注入单元发送的前一帧仿真图像,对接收图像进行处理后生成对应的伺服控制指令,并将对应的伺服控制指令发送至伺服控制单元。伺服控制单元接收伺服控制指令后根据指令完成跟踪转台控制响应。通过图像信号处理单元,伺服控制单元、光电成像单元和图像仿真注入单元的时序设计,实现光电跟踪系统在实物与图像注入仿真两种不同方式下闭环跟踪的信号同步。从而采取内外场互相对比验证、有机结合的手段,能够对性能进行充分测试。保证系统在两种方式下均能稳定工作,并且工作状态具有一致性,从而提高两种方式互相对比验证的有效性。
67.第二方面,本发明实施例提供一种信号同步系统。
68.图4为本发明实施例提供的信号同步系统的结构示意图。如图4所示,本实施例提供的信号同步系统,包括以下结构。包括:图像信号处理单元1和伺服控制单元2;
69.图像信号处理单元1,用于响应于接收到图像仿真注入单元发送的待跟踪目标的第一仿真图像,对所述第一仿真图像进行目标检测处理,生成第一控制指令,并将所述第一控制指令发送至伺服控制单元;或,所述图像信号处理单元1响应于接收到光电成像单元发送的待跟踪目标的第一真实图像,对所述第一真实图像进行目标检测处理,生成第二控制指令,并将所述第二控制指令发送至伺服控制单元2;
70.伺服控制单元2,用于响应于接收到所述第一控制指令或所述第二控制指令,根据所述第一控制指令或所述第二控制指令完成跟踪转台控制响应。
71.在一些实施例中,所述图像信号处理单元1还用于生成固定频率的同步信号,并将所述同步信号同时发送至所述伺服控制单元2和光电成像单元。
72.在一些实施例中,信号同步系统还包括:图像仿真注入单元3;
73.所述伺服控制单元2,还用于响应于接收到所述同步信号,确定当前跟踪转台角度信息,并将所述当前跟踪转台角度信息发送至图像仿真注入单元3;
74.所述图像仿真注入单元3,用于根据所述当前跟踪转台角度信息确定待跟踪目标的第一仿真图像。
75.在一些实施例中,信号同步系统还包括:光电成像单元4;
76.所述光电成像单元4响应于接收到所述同步信号,确定待跟踪目标的第一真实图像,并将所述第一真实图像发送至所述图像信号处理单元1。
77.本文已经公开了示例实施例,并且虽然采用了具体术语,但它们仅用于并仅应当被解释为一般说明性含义,并且不用于限制的目的。在一些实施例中,对本领域技术人员显而易见的是,除非另外明确指出,否则可单独使用与特定实施例相结合描述的特征、特征和/或元素,或可与其他实施例相结合描述的特征、特征和/或元件组合使用。因此,本领域技术人员将理解,在不脱离由所附的权利要求阐述的本发明的范围的情况下,可进行各种形式和细节上的改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1