路面障碍信息的检测方法、装置、电子设备和介质与流程
本公开涉及路面检测,尤其涉及一种路面障碍信息的检测方法、装置、电子设备和介质。
背景技术:
1、车辆路面感知能够对车辆行驶时前方的路面不平整度进行检测,得到路面的高低起伏,以对车辆和悬架进行控制调节,保证驾驶舒适性。
2、相关技术中,对于车辆路面感知,主要是通过视觉/车载传感器在感受到车辆颠簸等已出现的变化时,并在毫秒级内对车辆和悬架进行软硬调节,以使得车辆行驶适应于路面。
3、上述路面感知方式,在车辆出现颠簸时才进行控制调节,难以准确获取到路面障碍信息,从而,降低车辆控制调节准确性。
技术实现思路
1、为了解决上述技术问题,本公开提供了一种路面障碍信息的检测方法、装置、电子设备和介质。
2、第一方面,本公开提供了一种路面障碍信息的检测方法,其特征在于,包括:
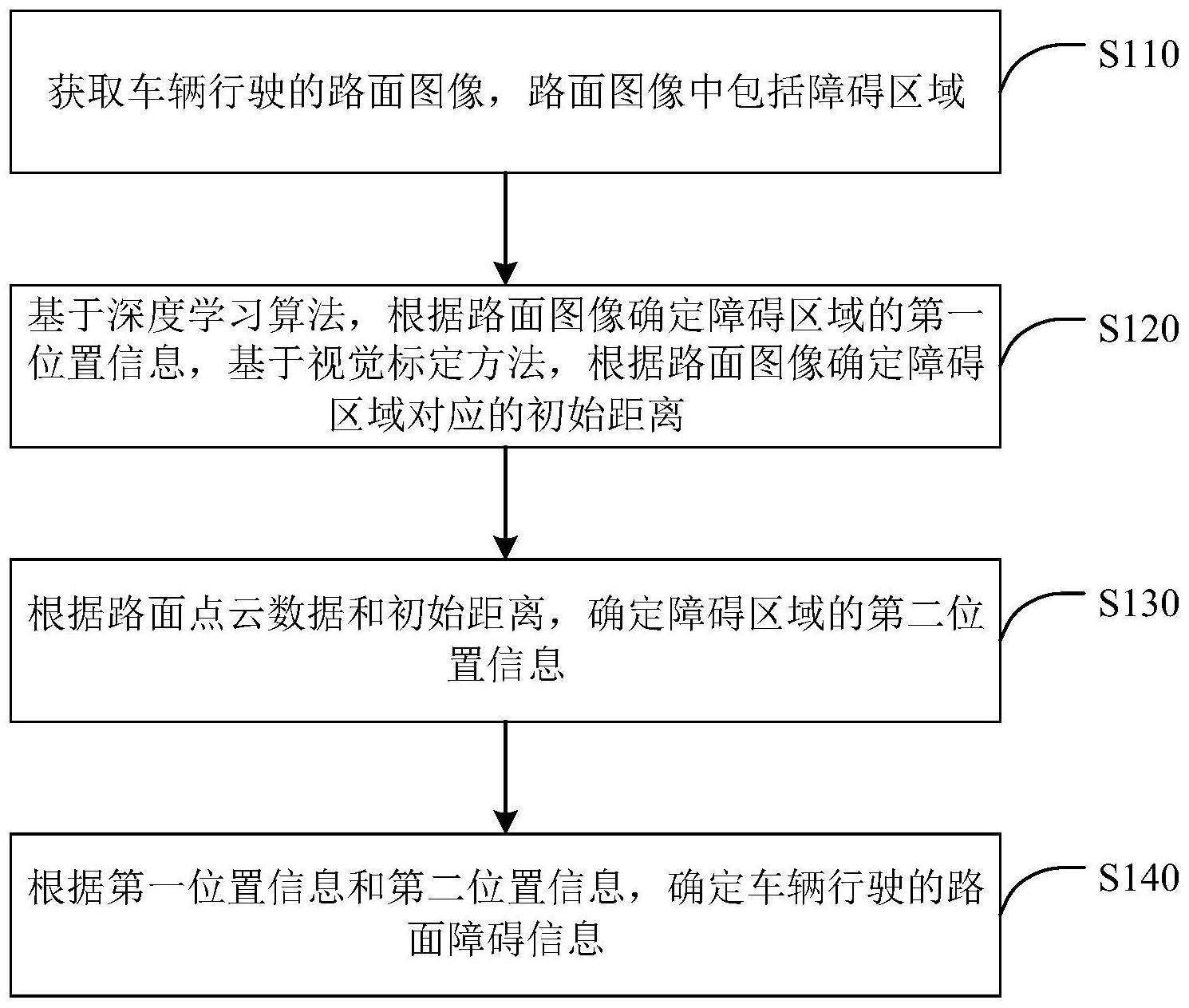
3、获取车辆行驶的路面图像,所述路面图像中包括障碍区域;
4、基于深度学习算法,根据所述路面图像确定所述障碍区域的第一位置信息,所述第一位置信息包括:第一距离和第一高度;
5、基于视觉标定方法,根据所述路面图像确定所述障碍区域对应的初始距离,所述初始距离为所述障碍区域与所述车辆之间的一个预估距离;
6、根据路面点云数据和所述初始距离,确定所述障碍区域的第二位置信息,所述第二位置信息包括:第二距离和第二高度;
7、根据所述第一位置信息和所述第二位置信息,确定所述车辆行驶的路面障碍信息。
8、可选的,所述根据路面点云数据和所述初始距离,确定所述障碍区域的第二位置信息,包括:
9、根据所述初始距离和路面点云数据,确定所述障碍区域对应的障碍点云数据;
10、根据所述障碍点云数据,确定所述障碍区域相对路面的最高点位置和所述障碍区域相对路面的最低点位置;
11、根据所述最高点位置和所述最低点位置,确定所述第二距离和所述第二高度。
12、可选的,所述根据所述最高点位置和所述最低点位置,确定所述第二高度,包括:
13、基于所述路面、所述最高点位置和所述最低点位置,建立三角区域;
14、确定所述三角区域的高度为所述第二高度。
15、可选的,所述根据所述最高点位置和所述最低点位置,确定所述第二距离,包括:
16、确定所述三角区域的高度对应的线段与所述路面的交点为目标点;
17、确定所述目标点与所述车辆之间的距离为第二距离。
18、可选的,所述根据所述第一位置信息和所述第二位置信息,确定所述车辆行驶的路面障碍信息,包括:
19、基于预设的第一权重系数,根据所述第一距离和所述第二距离,确定所述障碍区域距离所述车辆的距离;
20、其中,所述预设的第一权重系数包括:所述第一距离的比例系数和/或所述第二距离的比例系数。
21、可选的,所述根据所述第一位置信息和所述第二位置信息,确定所述车辆行驶的路面障碍信息,包括:
22、基于预设的第二权重系数,根据所述第一高度和所述第二高度,确定所述障碍区域距离路面的高度;
23、其中,所述预设的第二权重系数包括:所述第一高度的比例系数和/或所述第二高度的比例系数。
24、可选的,所述基于视觉标定方法,根据所述路面图像确定所述障碍区域对应的初始距离,包括:
25、基于预设的视觉标定方法,对所述路面图像中所述障碍区域进行距离标定,得到所述障碍区域对应的初始距离。
26、第二方面,本公开提供了一种路面障碍信息的检测装置,包括:
27、获取模块,用于获取车辆行驶的路面图像,所述路面图像中包括障碍区域;
28、确定模块,用于基于深度学习算法,根据所述路面图像确定所述障碍区域的第一位置信息,所述第一位置信息包括:第一距离和第一高度;
29、确定模块,还用于基于视觉标定方法,根据所述路面图像确定所述障碍区域对应的初始距离,所述初始距离为所述障碍区域与所述车辆之间的一个预估距离;
30、确定模块,还用于根据路面点云数据和所述初始距离,确定所述障碍区域的第二位置信息,所述第二位置信息包括:第二距离和第二高度;
31、确定模块,还用于根据所述第一位置信息和所述第二位置信息,确定所述车辆行驶的路面障碍信息。
32、可选的,确定模块,包括:第一确定单元、第二确定单元和第三确定单元;
33、第一确定单元,用于根据所述初始距离和路面点云数据,确定所述障碍区域对应的障碍点云数据;
34、第二确定单元,用于根据所述障碍点云数据,确定所述障碍区域相对路面的最高点位置和所述障碍区域相对路面的最低点位置;
35、第三确定单元,用于根据所述最高点位置和所述最低点位置,确定所述第二距离和所述第二高度。
36、可选的,第三确定单元,具体用于:
37、基于所述路面、所述最高点位置和所述最低点位置,建立三角区域;
38、确定所述三角区域的高度为所述第二高度。
39、可选的,第三确定单元,具体用于:
40、确定所述三角区域的高度对应的线段与所述路面的交点为目标点;
41、确定所述目标点与所述车辆之间的距离为第二距离。
42、可选的,确定模块,具体用于:
43、基于预设的第一权重系数,根据所述第一距离和所述第二距离,确定所述障碍区域距离所述车辆的距离;
44、其中,所述预设的第一权重系数包括:所述第一距离的比例系数和/或所述第二距离的比例系数。
45、可选的,确定模块,具体用于:
46、基于预设的第二权重系数,根据所述第一高度和所述第二高度,确定所述障碍区域距离路面的高度;
47、其中,所述预设的第二权重系数包括:所述第一高度的比例系数和/或所述第二高度的比例系数。
48、可选的,确定模块,具体用于:
49、基于预设的视觉标定方法,对所述路面图像中所述障碍区域进行距离标定,得到所述障碍区域对应的初始距离。
50、第三方面,本公开还提供了一种电子设备,包括:
51、一个或多个处理器;
52、存储装置,用于存储一个或多个程序,
53、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现本发明实施例中的任一种所述的路面障碍信息的检测方法。
54、第四方面,本公开还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本发明实施例中的任一种所述的路面障碍信息的检测方法。
55、本公开实施例提供的技术方案与现有技术相比具有如下优点:通过实时获取车辆行驶的路面图像,其中,路面图像中包括障碍区域,路面图像是基于摄像头采集得到的两幅图像进行拼接处理得到的,基于深度学习算法,根据路面图像确定障碍区域的第一位置信息,第一位置信息包括:第一距离和第一高度;基于视觉标定方法,根据路面图像确定障碍区域对应的初始距离,初始距离为障碍区域与车辆之间的一个预估距离;根据路面点云数据和初始距离,确定障碍区域的第二位置信息,第二位置信息包括:第二距离和第二高度,以结合第一位置信息和第二位置信息,有效确定出车辆行驶的路面障碍信息,从而,实现对车辆路面的障碍信息的提前预测,并对障碍信息进行精准定位,便于为车辆和悬架的控制调节提供准确的参考依据,使得车辆遇到障碍信息之前得到预先控制,有效提升车辆驾驶舒适性。
- 还没有人留言评论。精彩留言会获得点赞!