图像处理方法、装置、设备、存储介质及程序产品与流程
本技术涉及图像处理技术,尤其涉及一种图像处理方法、装置、电子设备、计算机可读存储介质及计算机程序产品。
背景技术:
1、图像可以看成是由两部分组成,即前景和背景。图像抠图(image matting)是指从图像中提取出我们所感兴趣的前景目标,同时过滤掉背景部分。
2、随着图像处理技术的发展,图像抠图技术应用于电影拍摄以及后期制作场景,从而可以实现电影效果的多样性以及灵活性,但是随着制作需求的提升,图像的背景不再局限于干净纯色,可能存在灯光照射不均匀的情况以及背景本身带纹理的情况,因此相关技术中的图像抠图技术无法得到干净的前景图像,从而实现较高的合成效果。
技术实现思路
1、本技术各实施例提供一种图像处理方法、装置、电子设备、计算机可读存储介质及计算机程序产品,能够提升待处理图像的合成效果。
2、本技术各实施例的技术方案是这样实现的:
3、本技术各实施例提供一种图像处理方法,包括:
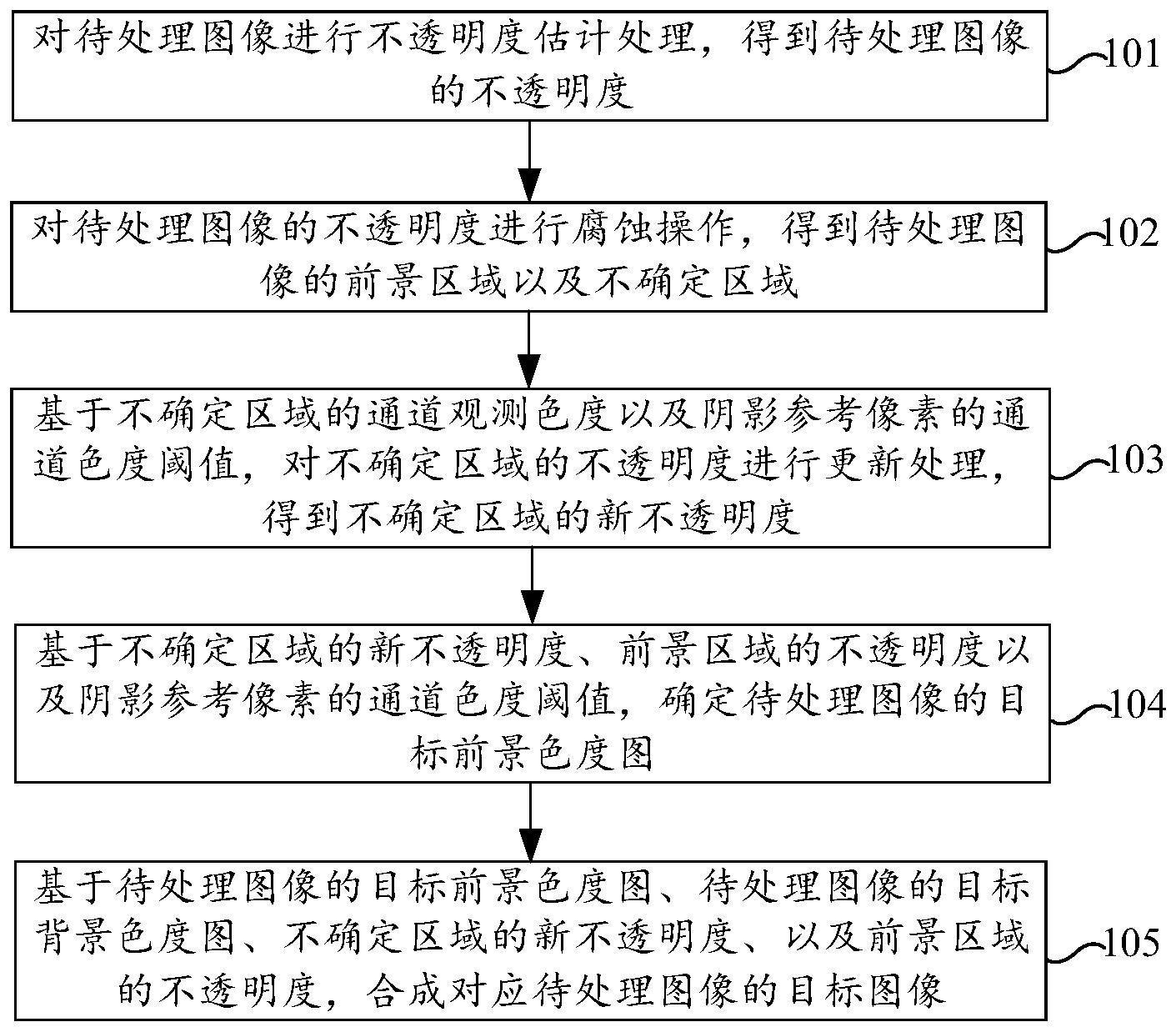
4、对待处理图像进行不透明度估计处理,得到所述待处理图像的不透明度;
5、对所述待处理图像的不透明度进行腐蚀操作,得到所述待处理图像的前景区域以及不确定区域;
6、基于所述不确定区域的通道观测色度以及参考像素的通道参考色度,对所述不确定区域的不透明度进行更新处理,得到所述不确定区域的新不透明度;
7、基于所述不确定区域的新不透明度、所述前景区域的不透明度以及所述参考像素的通道参考色度,确定所述待处理图像的目标前景色度图;
8、基于所述不确定区域的新不透明度、所述前景区域的不透明度以及所述参考像素的通道参考色度,确定所述待处理图像的目标前景色度图。
9、本技术各实施例提供一种图像处理装置,包括:
10、不透明度模块,用于对待处理图像进行不透明度估计处理,得到所述待处理图像的不透明度;
11、腐蚀模块,用于对所述待处理图像的不透明度进行腐蚀操作,得到所述待处理图像的前景区域以及不确定区域;
12、优化模块,用于基于所述不确定区域的通道观测色度以及参考像素的通道参考色度,对所述不确定区域的不透明度进行更新处理,得到所述不确定区域的新不透明度;
13、前景模块,用于基于所述不确定区域的新不透明度、所述前景区域的不透明度以及所述参考像素的通道参考色度,确定所述待处理图像的目标前景色度图;
14、合成模块,用于基于所述不确定区域的新不透明度、所述前景区域的不透明度以及所述参考像素的通道参考色度,确定所述待处理图像的目标前景色度图。
15、在上述方案中,所述不透明度模块,还用于:针对所述待处理图像的每个像素执行以下处理:获取所述像素的通道观测色度,并基于所述像素的通道观测色度,确定所述像素的颜色通道差值;基于所述像素的颜色通道差值,确定所述像素的不透明度。
16、在上述方案中,所述通道观测色度包括绿色通道观测色度、红色通道观测色度以及蓝色通道观测色度,所述不透明度模块,还用于:获取所述红色通道观测色度和蓝色通道观测色度中的较大观测色度;对所述绿色通道观测色度与所述较大观测色度进行求差处理,得到所述像素的颜色通道差值。
17、在上述方案中,所述不透明度模块,还用于:获取第一截断值以及第二截断值;基于所述第一截断值以及所述第二截断值,对所述像素的颜色通道差值进行截取映射处理,得到截取映射结果;基于所述截取映射结果,确定所述像素的不透明度。
18、在上述方案中,所述不透明度模块,还用于:当所述像素的颜色通道差值小于第二截断值时,将数值1确定为所述像素的截取映射结果;当所述像素的颜色通道差值大于第一截断值时,将数值0确定为所述像素的截取映射结果,其中,所述第二截断值小于所述第一截断值;当所述像素的颜色通道差值不小于所述第二截断值,且不大于所述第一截断值时,执行以下处理:将所述第二截断值与所述第一截断值的第一差值的倒数作为斜率,并将所述斜率的相反数与所述第一截断值的乘积作为纵通道截距;将所述斜率与所述像素的颜色通道差值相乘,并将相乘结果与所述纵通道截距相加,得到所述像素的截取映射结果。
19、在上述方案中,所述不透明度模块,还用于:执行以下处理中任意一种:将所述像素的截取映射结果确定为所述像素的不透明度;对所述截取映射结果进行平滑处理,得到所述像素的不透明度。
20、在上述方案中,所述不透明度模块,还用于:获取所述截取映射结果的立方值以及平方值;获取与所述立方值负相关,且与所述平方值正相关的不透明度。
21、在上述方案中,所述腐蚀模块,还用于:获取腐蚀操作矩阵;针对所述待处理图像的每个像素执行以下处理:通过所述腐蚀操作矩阵对所述像素的不透明度进行与操作,得到所述像素的腐蚀像素值,并确定标准像素值与所述腐蚀像素值的第二差值;将所述第二差值为所述标准像素值的像素,组成所述不确定区域,并将所述差值为零的像素,组成所述前景区域。
22、在上述方案中,所述操作矩阵包括n*n个操作元素,n为大于1的整数,每个所述操作元素的值为所述标准像素值,所述腐蚀模块,还用于:当所述像素的不透明度大于不透明度阈值时,将所述像素的不透明度更新为所述标准像素值;当所述像素的不透明度不大于所述不透明度阈值时,将所述像素的不透明度更新为零;获取对应所述像素的至少一个关联像素;获取所述操作矩阵中对应所述像素的操作元素以及对应每个所述关联像素的操作元素;对所述像素更新后的透明度与对应的操作元素的值进行与处理,得到第一与处理结果;针对每个所述关联像素执行以下处理:对所述关联像素更新后的透明度与对应的操作元素的值进行与处理,得到第二与处理结果;当所述第一与处理结果以及至少一个第二与处理结果中存在零值时,将所述像素的腐蚀像素值确定为零值;当所述第一与处理结果以及至少一个第二与处理结果中不存在所述零值时,将所述像素的腐蚀像素值确定为所述标准像素值。
23、在上述方案中,所述优化模块,还用于:基于所述通道参考色度以及所述通道观测色度,确定所述不确定区域中每个像素与所述参考像素之间的色度距离;基于所述色度距离,对所述不确定区域的不透明度进行更新处理,得到所述不确定区域的新不透明度。
24、在上述方案中,所述优化模块,还用于:在基于所述通道参考色度以及所述通道观测色度,确定所述不确定区域中每个像素与所述参考像素之间的色度距离之前,获取绿色通道参考色度、红色通道参考色度以及蓝色通道参考色度,作为参考像素的通道参考色度;获取绿色通道观测色度、红色通道观测色度以及蓝色通道观测色度,作为所述不确定区域中每个像素的通道观测色度。
25、在上述方案中,所述优化模块,还用于:对所述通道参考色度进行空间转换处理,得到目标参考色度;针对所述不确定区域中每个所述像素执行以下处理:对所述通道观测色度进行空间转换处理,得到目标观测色度;获取与所述色度距离对应的目标通道;从所述目标观测色度中获取与所述目标通道对应的目标观测色度,并从所述目标参考色度中获取与所述目标通道对应的目标参考色度;基于与所述目标通道对应的目标观测色度以及与所述目标通道对应的目标参考色度,确定所述像素与所述参考像素之间的色度距离。
26、在上述方案中,所述优化模块,还用于:对所述不确定区域中每个所述像素与所述参考像素的色度距离进行平滑处理,得到所述不确定区域中每个所述像素的阴影参考不透明度;针对所述不确定区域中每个所述像素执行以下处理:当所述像素的阴影参考不透明度小于所述像素的不透明度时,将所述像素的阴影参考不透明度确定为所述像素的新不透明度;当所述像素的阴影参考不透明度不小于所述像素的不透明度时,将所述像素的不透明度确定为所述像素的新不透明度。
27、在上述方案中,所述前景模块,还用于:针对所述待处理图像中每个像素执行以下处理:当所述像素处于所述前景区域时,基于所述像素的不透明度,获取所述像素的透明度;当所述像素处于所述不确定区域时,基于所述像素的新不透明度,获取所述像素的透明度;获取所述像素的透明度与所述参考像素的通道参考色度进行相乘处理,并获取所述像素的通道观测色度与相乘结果的第三差值;当所述像素处于所述前景区域时,将所述第三差值与所述像素的不透明度的比值,确定为所述像素的前景色度;当所述像素处于所述不确定区域时,将所述第三差值与所述像素的新不透明度的比值,确定为所述像素的前景色度;将所述待处理图像中多个像素的前景色度组成所述待处理图像的目标前景色度图。
28、在上述方案中,所述像素的前景色度包括红色前景色度、绿色前景色度以及蓝色前景色度,在确定所述待处理图像的目标前景色度图之后,所述前景模块,还用于:针对所述待处理图像中每个像素执行以下处理:获取所述像素的红色前景色度以及所述像素的蓝色前景色度的平均值;当所述像素的绿前景色度大于所述平均值时,将所述像素的前景色度更新为所述平均值;当所述像素的绿前景色度不大于所述平均值时,保持所述像素的前景色度不变。
29、本技术各实施例提供一种电子设备,包括:
30、存储器,用于存储可执行指令;
31、处理器,用于执行所述存储器中存储的可执行指令时,实现本技术各实施例提供的图像处理方法。
32、本技术各实施例提供一种计算机可读存储介质,存储有可执行指令,用于被处理器执行时,实现本技术各实施例提供的图像处理方法。
33、本技术各实施例具有以下有益效果:
34、通过对待处理图像的不透明度进行腐蚀操作,得到待处理图像的前景区域以及不确定区域,可以有效提高前景边缘以及不确定区域的正确率,基于不确定区域的通道观测色度以及参考像素的通道参考色度,对不确定区域的不透明度进行更新处理,得到不确定区域的新不透明度,由于对不确定区域的不透明度进行了更新,从而可以优化不确定区域中的阴影的透明度,基于优化更新后的透明度来反推出前目标景色度图,并结合目标背景色度图进行合并,可以得到准确去除不确定区域中原始内容的目标图像。
- 还没有人留言评论。精彩留言会获得点赞!