1.本发明属于遥感信息自动提取技术领域,尤其涉及一种基于无人 机影像的优势树种遥感分类方法及分类系统。
背景技术:2.目前基于无人机光学影像数据进行的树种分类方法主要有三类, 支持向量机(support vector machine,svm)、决策树(decision tree,dt) 模型、卷积神经网络(convolutional neural network,cnn)。
3.1、支持向量机是一种基于统计学习理论框架下的分类方法,是 vapnik等人在20世纪提出来的。在结构风险最小化准则下,svm将 最优化求解问题转化为一个凸二次规划求解问题,以此得到一个全局 最优解。使用svm进行分类时,它具备适用于小样本统计学习、高 维特征空间、抗噪能力强等特点,在高光谱影像分类中有许多优势。 但该方法存在只依靠光谱信息不能充分地进行分类的缺陷。
4.2、决策树算法是基于分层分类的指导思想,将不同地物的属性 特点按照一定的原则进行逐步分解。根据研究人员对相应区域地物特 征的了解,在对每一次进行分解时,可以按照波段以及不同的波段组 合分类。按照遥感图像的不同特性采用决策树分类,将分类和决策通 过树型结构进行表示,从而发现其规律。但决策树在处理特征关联性 比较强的数据时表现较为一般,没有人工神经网络稳定、精度高。
5.3、卷积神经网络具有自动学习分类特征的能力,其中卷积作为 特征提取器,神经网络作为分类器,避免了传统识别方法中复杂的特 征提取和数据构建的过程,能在多个图像分类任务中取得优异的分类 效果,是目前热门的分类技术。卷积神经网络的层数越多,提取的特 征就会越充分,因此探索深层的网络模型成了新的趋势。但是,随着 网络深度的增加梯度消失问题也会出现,网络的后层不能有效地学习 到分类特征,再增加网络层数时就会出现梯度下滑等问题,所以解决 网络层数增加梯度减少地问题是提高卷积神经网络学习、分类能力的 关键。
技术实现要素:6.为解决上述技术问题,本发明提出基于高光谱成像的精标注数字 病理数据集自动生成方法,该方法准确高效,智能可靠,有助于为深 度学习算法提供大规模精标注数字病理数据集。
7.一方面为实现上述目的,本发明提供了一种基于无人机影像的优 势树种遥感分类方法,包括如下步骤:
8.基于无人机遥感图像,获取数据集;
9.构建densenet_bl模型;
10.基于所述数据集对所述densenet_bl模型进行监督训练;
11.基于训练后的所述densenet_bl模型,完成优势树种遥感分类。
12.可选地,获取数据集的方式为:
13.基于所述无人机遥感图像,剪裁获取同一树种的树冠图像,记录 经纬度,并对树种进行核查后,获得所述数据集。
14.可选地,所述densenet_bl模型包括:1个7
×
7的卷积核、1个 3
×
3的池化层与4个denseblock_bl;
15.每个所述denseblock_bl中的层与层之间通过1
×
1的瓶颈层连 接;
16.4个所述denseblock_bl之间通过过渡层连接。
17.可选地,所述数据集包括训练集、验证集与自然林地数据。
18.可选地,对所述densenet_bl模型进行监督训练的方式为:
19.基于所述卷积核对所述训练集与验证集中的树冠图像进行卷积 处理;
20.基于4个所述denseblock_bl对卷积处理后的所述树冠图像进 行降维处理;
21.基于所述池化层对降维处理后的所述树冠图像进行最大池化处 理,完成所述densenet_bl模型的监督训练。
22.可选地,对所述densenet_bl模型进行监督训练还包括:
23.采用梯度下降算法,对所述densenet_bl模型的参数进行调整。
24.可选地,基于训练后的所述densenet_bl模型,对所述自然林 地数据进行分类提取,获得优势树种遥感分类结果。
25.另一方面为实现上述目的,本发明提供了一种基于无人机影像的 优势树种遥感分类系统,包括:获取模块、构建模块、训练模块与分 类模块;
26.所述获取模块用于基于无人机遥感图像,剪裁同一树种的树冠图 像,获取数据集,所述数据集包括训练集、验证集与自然林地数据;
27.所述构建模块用于构建densenet_bl模型;
28.所述训练模块用于基于所述训练集与验证集对所述densenet_bl模型进行监督训练;
29.所述分类模块用于基于训练后的所述densenet_bl模型对所述 自然林地数据进行分类提取,输出优势树种遥感分类结果。
30.与现有技术相比,本发明具有如下优点和技术效果:
31.本发明针对无人机光学影像数据,在树种信息十分密集且繁多的 情况下,基于普通的densenet模型,进行改进,在每个残差块之间 插入小型卷积核作为瓶颈层,在提高网络模型的计算效率,减少网络 计算量和参数量的同时,达到理想的树种分类效果。本发明适用于高 分辨率无人机光学影像的树种分类提取,提取效果好。
附图说明
32.构成本技术的一部分的附图用来提供对本技术的进一步理解,本 申请的示意性实施例及其说明用于解释本技术,并不构成对本技术的 不当限定。在附图中:
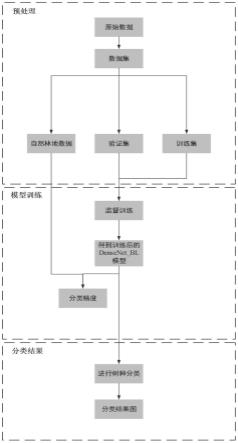
33.图1为本发明实施例一的一种基于无人机影像的优势树种遥感 分类方法流程示意图;
34.图2为本发明实施例一的dense block_bl结构示意图;
35.图3为本发明实施例一的a结构的残差块结构示意图;
36.图4为本发明实施例一的b结构的残差块结构示意图;
37.图5为本发明实施例一的分类结果示意图;
38.图6为本发明实施例二的一种基于无人机影像的优势树种遥感 分类系统结构示意图。
具体实施方式
39.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例 中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本 申请。
40.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算 机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻 辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或 描述的步骤。
41.实施例一
42.如图1所示,本发明提供一种基于无人机影像的优势树种遥感分 类方法,其特征在于,包括如下步骤:
43.基于无人机遥感图像,获取数据集;并将数据分为训练集、验证 集与自然林地数据。
44.进一步地,制作数据集是将无人机高分辨率图像上可以区分为同 一树种的树冠图像裁剪出来,并记录其具体的经纬度,实地调查核实 树种,得到正确的数据集。通过训练集和验证集得到的结果对 densenet_bl模型进行训练和调试。
45.构建densenet_bl模型;densenet_bl模型包括:1个7
×
7的卷 积核、1个3
×
3的池化层与4个denseblock_bl;每个所述 denseblock_bl中的层与层之间通过1
×
1的瓶颈层连接;4个所述 denseblock_bl之间通过过渡层连接。denseblock_bl为在 denseblock的每个残差块(residual block)之间加入一个1
×
1的小 型卷积核作为瓶颈层(bottleneck layer)进行提前降纬。
46.进一步地,本实施例中所提出的densenet_bl模型,是基于具 有密集连接机制的densenet(密集神经网络)模型基础上,在分类 模型的残差块之间插入小型卷积核作为瓶颈层(bottleneck layer), 组成了新的densen block,densen block是由内部的残差块(residualblock)全连接得到的,残差块(residual block)是denseblock_bl 中的层。瓶颈层可以对输入的特征图进行降维,减少网络的参数,提 高网络模型的收敛速度。同时,对模型的全连接层进行了改进,将其 输出节点改为5,有效改进softmax函数,最终通过不同学习率的对 比实验发现,该方法能在小样本的情况下高效分类树种。
47.网络深度的增加,会引起卷积层需要训练网络参数的增加,增加 了网络的参数和计算量。本文的方法是在densenet block中的残差块 之间加入1
×
1的小型卷积核作为瓶颈层(bottleneck layer),对传 递的特征图进行提前降维,如图2所示。
48.每一个残差块输入一个x0
×
y0
×
z0的特征图后(x、y为特征 图的尺寸,z为通道数),会向后输出一个经过卷积后的x1
×
y1
×ꢀ
z1,和一个从前面网络中得到的x0
×
y0
×
z0。如附图3所示的a结 构。
49.a结构中每个残差块的计算量:
50.x
×y×z×3×3×
z/2
51.a结构中每个残差块参数量:
52.z
×3×3×
z/2
53.加入一个1
×
1卷积作为瓶颈层后,前面传递进来的特征图会先 被瓶颈层降维,如附图4所示的b结构。
54.b结构中每个残差块的计算量:
55.x
×y×z×1×1×
z/4+x
×y×
z/4
×3×3×
z/2
56.b结构中每个残差块的参数量:
57.z
×1×1×
z/4+z/4
×3×3×
z/2
58.图4结构的残差块结构a结构中的计算量和参数量都约是b结构 的3.3倍,证明了瓶颈层能够增加了网络的非线性,降低网络计算量 和参数量,使得网络可以表达更加复杂的特征,解决了网络层数增加 梯度减少地问题,降低深层网络在使用时占用的计算资源和存储资源, 提高整个网络的计算效率。
59.基于训练集和验证集对所述densenet_bl模型进行监督训练的 方式为:
60.基于所述卷积核对所述训练集与验证集中的树冠图像进行卷积 处理;基于4个所述dense block_bl对卷积处理后的所述树冠图像 进行降维处理;基于所述池化层对降维处理后的所述树冠图像进行最 大池化处理,完成所述densenet_bl模型的监督训练。
61.对densenet_bl模型进行监督训练还包括:采用梯度下降算法, 对densenet_bl模型的参数进行调整。
62.进一步地,在本实施例中;
63.s11模型由一个7
×
7的卷积核开始,该卷积核对输入的树冠影 像进行内核大小为7
×
7、步幅大小为2卷积操作,之后是步长为2 的3
×
3的最大池化操作。
64.s12中间部分由4个dense block_bl组成,dense block_bl中 的层与层之间通过1
×
1瓶颈层连接,用来对输入的特征图进行降维。
65.s13dense block_bl之间由过渡层连接,通过卷积和池化操作来 改变特征图的大小和尺寸。4个dense block_bl之后采用7
×
7的全 局平均池化对图像进行处理。
66.s14在模型训练阶段通过随机梯度算法,进行监督训练对网络模 型的参数进行调整,并重复前面的s11~s31的操作。
67.基于训练后的所述densenet_bl模型,完成优势树种遥感分类。
68.在本实施例中,采用训练后的所述densenet_bl模型,对所述 自然林地数据进行分类提取,输出优势树种遥感分类结果,得到分类 结果图,分类结果如图5和图6所示。
69.如图6所示,本发明还提供了一种基于无人机影像的优势树种遥 感系统,包括:获取模块、构建模块、训练模块与分类模块;
70.所述获取模块用于基于无人机遥感图像,剪裁同一树种的树冠图 像,获取数据集,所述数据集包括训练集、验证集与自然林地数据;
71.所述构建模块用于构建densenet_bl模型;
72.所述训练模块用于基于所述训练集与验证集对所述 densenet_bl模型进行监督训练;
73.所述分类模块用于基于训练后的所述densenet_bl模型对所述 自然林地数据进行分类提取,输出优势树种遥感分类结果。
74.以上,仅为本技术较佳的具体实施方式,但本技术的保护范围并 不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范 围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。 因此,本技术的保护范围应该以权利要求的保护范围为准。